Иэобретенке относится к измерительной технике и может быть использовано для точного измерения перемещений в различных областях машиностроения ,
Целью изобретения является повышение точности измерений за счет уменьшения количества и номенклатуры обмоток.
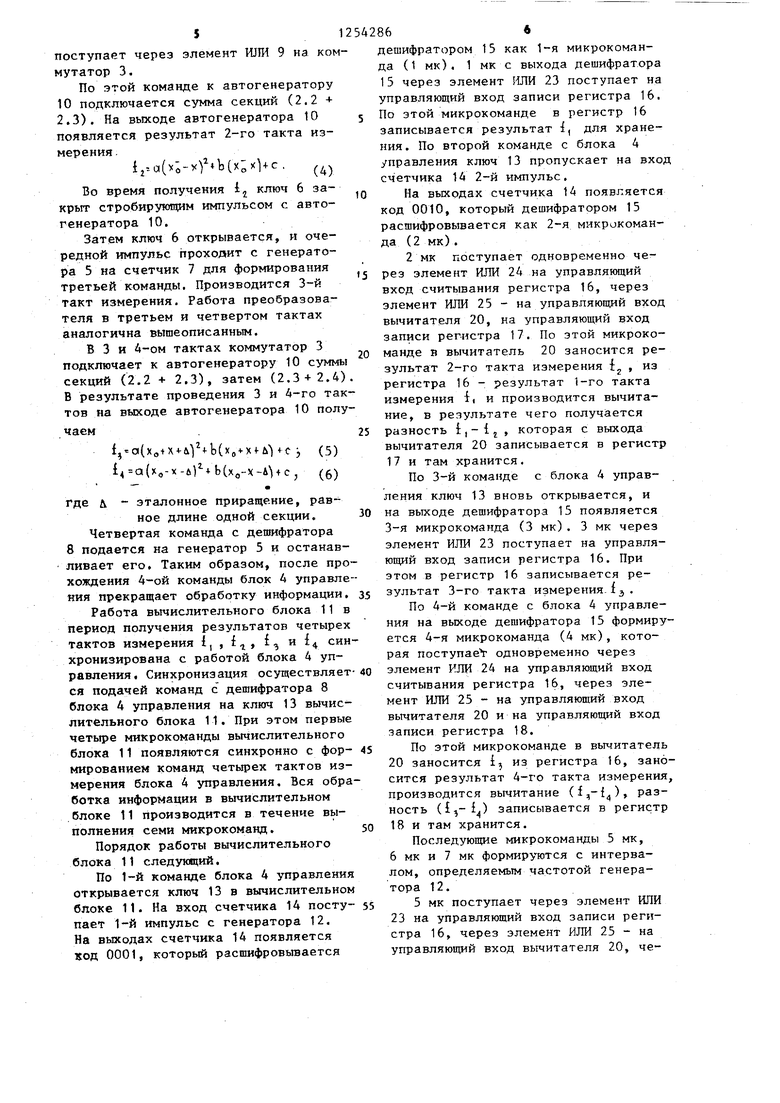
На чертеже представлена блок-схе- на преобразователя.
Преобразователь содержит ферромагнитный стержень 1, размещенный внутри немагнитного цилиндра (не показан) . На немагнитном стержне размещена обмотка 2, вьтолненная в виде четырех идентичных секций 2.1-2.А. Секции подключены к коммутатору 3, управляющий вход которого связан с выходом блока А управления, в который в свою очередь входят генератор 5 тактовых импульсов, ключ 6, двоично-десятичный счетчик 7, дешифратор 8, элемент ИЛИ 9. Преобразователь содержит также автогенератор 10, вычислительный блок 11, в который входят генератор 12 тактовых импульсов, ключ 13, двоично-десятичный счетчик 14/ дешифратор 15, первый 16, второй 17, третий 18 и четвертый 19 регистр памяти, вычислитель 20, делитель 21, умножитель 22, первый 23, второй 24, третий 25 и четвертый 26 элементы ИЛИ.
в блоке 4 управления генератор 5 тактовых импульсов через ключ 6 соединен с входом счетчика 7, выходы которого в свою очередь подключены к входам дешифратора 8, Четыре выхода деишфратора 8 соединены с входа ми элемента ИЛИ 9 и образуют четыре синхронизирующих выхода блока 4 упраления, которые подключены к входам ключа 13 вычислительного блока 11, являющимися синхронизируемыми входа- ми вычислительного блока 11.
Кроме того, четвертый выход дешифратора 8 подсоединен к управляющему входу генератора 5 тактовых импульсов. Выход коммутатора 3 соеди- иен с входом автогенератора 10, первый выход которого подсоединен к управляющему входу ключа 6 блока 4 управления, а второй - к входу регистра 16 и входу вычитателя 20 вы- числительного блока 11.
В вычислительном блоке 11 генератор 12 тактовых импульсов через ключ
0
5 0 5
0 5
13 соединен с входом счетчика 14, выходы которого подключены к входам дешифратора 15.
Дешифратор формирует семь микрокоманд: 1 мк, 2 мк, 3 мк, 4 мк, 5 мк, 6 мк и 7 мк.
В вычислительном блоке 11 первый выход дешифратора 15 через элемент ИЛИ 23 соединен с управляющим входом записи регистра 16,
Второй выход дешифратора 15 соединен с управляющим входом записи регистра 17, через элемент ИЛИ 24 - с управляющим входом считывания регистра 16 и через элемент ИЛИ 25 - с управляквдим входом вычитателя 20. Третий выход дешифратора 15 через элемент ИЛИ 23 соединен с управляющим i входом записи регистра 16. Четвертый выход дешифратора 15 соединен с управляющим входом записи регистра 18, через элемент ИЛИ 24 - с управляющим входом считывания регистра 1б, через элемент ИЛИ 25 - с управляющим входом вычитателя 20. Пятый выход дешифратора 15 соединен с управляющим входом считывания регистра 18, через элемеит ИЛИ 25 - с управляющим входом вычитателя 20, через элемент ИЛИ 26 - с управляющим входом считывания регистра 17, через элемент ИЛИ 23 - с управлякжЕим входом записи регистра 16, шестой выход дешифратора 15 соединен с управляющим входом делителя 21, через элемент ИЛИ 24 - с управляющим входом считывания регистра 16, через элемент ИЛИ 26 - с управляющим входом считывания регистра 17. Седьмой выход дешифратора 15 соединен с управляющим входом генератора 12, управляющим входом умножителя 22 и управляющим входом считывания регистра 19.
Выход регистра 16 подсоединен одновременно к входу вычитателя 20, входу делителя 21. Второй вход вычитателя 20 соединен с вторЮ входом делителя 21 и выходом регистра 17. Третий вход вычитатепя 20 связан с выходом регистра 18. Выход вычитателя 20 подключен одновременно к второму входу регистра 16, входу регистра 17, входу регистра 18.
Выход делителя 21 подключен к второму входу умножителя 22, к первому входу умножителя 22 подсоединен выход регистра 19.
Выход умножителя 22 является выходом дифференциального преобразователя.
С пульта управления (не показан) вйодятся сигналы: Сброс - к счет- чикам 7 и 14 блока Д управления и вычислительного блока 11, Пуск - к ключу 6 блока 4 управления, Запись л - к регистру 19 вычислительного блока 11.
В исходном положении ферромагнитный стержень 1 устанавливается симметрично относительно концов, секций 2.2 и 2.3 (положение Хд). Движение стержня 1 вверх принято за положител нов направление, вниз - за отрицательное. При указанном варианте установки измеряются как положительные (от Хо до +X мпы) так и отрифатсльные (от УО до - Хиаю перемещения. Весь диапазон измерения перемещений составляет 2 X „д ,
Для расширения диапазона измерения перемещений одного знака (например, положительного направления) в 2 раза стержень 1 устанавливается в точку Коммутатор 3 соединяет последовательно две рядом расположенные секции 2.1 и 2.2 или 2.2 и 2.3, или 2.3 и 2,4 и включает их в задающий колебательнъо контур автогенератора 10. С выхода автогенератора 10 выходит частотный код, соответствующий текущему положению стержня . Перемещение стержня 1 вызывает изменение индуктивности обмоток, подключенных к автогенератору 10. Эт приводит к изменению частоты i автогенератора 10.
Таким образом, перемещение х преобразуется в изменение индуктивности L и соответственно в изменение частоты i автогенератора 10. В результате преобразований У- L L- t на вы- ход автогенератора 10 поступает частотный код
Ьф(к), (1)
где ф(х) - функция преобразования 50 перемещения X в частоту i .
Функция преобразования устройства, в котором используются индуктивные датчики соленоидального типа с ци- 55 линдрическим ферромагнитным якорем, может быть аппроксимирована параболической зависимостью
i -О; X Ь; X +С; ,
(2)
s О
5 20
5
5
где f 1, 2, 3.,..., и - участки аппроксимации; ii ;- параметры
для -го участка аппроксимации.
Кусочно-параболическая аппроксимация является наиболее точной и позво- ляет максимально использовать рабочий диапазон преобразователя.
Дифференциальный преобразователь работает в следующей последовательности.
С пульта управления (не показан) в регистр 19 записывается значение эталонного прчращения Л , подаются команды Сброс на счетчики 7, 14. При этом счетчики 7, 14 обнуляются. Преобразователь готов к работе.
По команде Пуск, поступающей с пульта управления, ключ 6 отпирается и первый импульс с генератора 5 поступает на вход счетчика 7.
На выходах счетчика 7 появляется код 0001. Этот код поступает на дешифратор 8, расшифровывается и в виде команды через элемент ИЛИ 9 передается на управляющий вход коммутатора 3. Последний подключает к автогенератору 10 сумму секций (2.1 + 2.2). На выходе автогенератора 10 появляется результат 1-го такта измерения
i,-a{x.xf.b(x,+ 4Vc, (3)
где f, - результат 1-го такта измерения;
о,Ь,с - параметры функции преобразования;УО начальное положение якоря 1;
Х - текущее положение якоря 1. Во время получения результата 1, и последующих i, i , i автогенератор 10 формирует стробирующий импульс определенной длительности. Этот импульс подается на ключ 6, не допуская прохождения следующего импульса на вход счетчика 7, а значит, и формирования) следующей команды.
После выдачи i, в вычислительный блок 11 ключ 6 отпирается и очередной импульс с генератора 5 поступает на счетчик 7. На выходах счетчика 7 появляется код 0010, которьй после де- пифратора 8 в виде второй команды
поступает через элемент ШШ 9 на коммутатор 3.
По этой команде к автогенератору 10 подключается сумма секций (2.2 + 2.3). На выходе автогенератора 10 появляется результат 2-го такта измерения
i2-- ( Ь(х;(1+с,
Во время получения ij ключ 6 закрыт стробирукщим импульсом с автогенератора 10.
Затем ключ 6 открывается, и очередной импульс проходит с генератора 5 на счетчик 7 для формирования третьей команды. Производится 3-й такт измерения. Работа преобразователя в третьем и четвертом тактах аналогична вышеописанным.
В 3 и А-ом тактах коммутатор 3 подключает к автогенератору 10 суммы секций (2.2 + 2.3), затем (2.3-1-2.4) В результате проведения 3 и 4-го тактов на выходе автогенератора 10 получаем. f, a(xo+X4-i)Hb(xoVXf uV i (5)
()c,-x-u)b(xo-x-4Vc, (5)
где л - эталонное приращение, равное длине одной секции.
Четвертая команда с дешифратора 8 подается на генератор 5 и останавливает его. Таким образом, после прохождения 4-ой команды блок 4 управления прекращает обработку информации.
Работа вычислительного блока 11 в период получения результатов четырех тактов измерения 1, , i, f, и i синхронизирована с работой блока 4 управления. Синхронизация осуществляет ся подачей команд с дешифратора 8 блока 4 управления на ключ 13 вычислительного блока 11, При этом первые четьфе микрокоманды вычислительного блока 11 появляются синхронно с фор- мированием команд четырех тактов измерения блока 4 управления. Вся обработка информации в вычислительном блоке 11 производится в течение выполнения семи микрокоманд,
Порядок работы вычислительного блока 11 следующий.
По 1-й команде блока 4 управления открывается ключ 13 в вычислительном блоке 11, На вход счетчика 14 посту- пает 1-й импульс с генератора 12, На выходах счетчика 14 появляется код 0001, который распшфровьгаается
5
0
5
0
5
дешифратором 15 как 1-я микрокоманда (1 мк). 1 мк с выхода дешифратора 15 через элемент ИЛИ 23 поступает на управляющий вход записи регистра 16. По этой микрокоманде в регистр 16 записывается результат f, для хранения , По второй команде с блока 4 управления ключ 13 пропускает на вход счетчика 14 2-й и пульс.
На выходах счетчика 14 появляется код 0010, который дешифратором 15 расшифровывается как 2-я микрокоманда (2 мк).
2 мк поступает одновременно через элемент ИЛИ 24 на управляющий вход считывания регистра 16, через элемент ИЛИ 25 - на управляющий вход вычитателя 20, на управляющий вход записи регистра 17. По этой микрокоманде в вычитатель 20 заносится результат 2-го такта измерения f , из регистра 16 - результат 1-го такта измерения i( и производится вычитание, в результате чего получается разность i , - 1J , которая с выхода вычитателя 20 записывается в регистр
17и там хранится.
По 3-й команде с блока 4 управления ключ 13 вновь открывается, и на выходе дешифратора 15 появляется 3-я микрокоманда (3 мк). 3 мк через элемент ИЛИ 23 поступает на управляющий вход записи регистра 16. При этом в регистр 16 записывается результат 3-го такта измерения- i 3
По 4-й команде с блока 4 управления на выходе дешифратора 15 формируется 4-я микрокоманда (4 мк), которая поступает- одновременно через элемент ИЛИ 24 на управляющий вход считывания регистра 16, через элемент ИЛИ 25 - на управляющий вход вычитателя 20 и на управляющий вход записи регистра 18.
По этой микрокоманде в вычитатель 20 заносится i, из регистра 16, заносится результат 4-го такта измерения, производится вычитание (i,-i), разность (f,-i) записывается в регистр
18и там хранится. Последующие микрокоманды 5 мк,
6 мк и 7 мк формируются с интервалом, определяемым частотой генератора 12.
5 мк поступает через элемент ИЛИ 23 на управляющий вход записи регистра 16, через элемент ИЛИ 25 - на управляющий вход вычитателя 20, че7
рез элемент ИЛИ 26 - на управляющий вход считывания регистра 18. По это микрокоманде включается вычитатель 20, в него заносится (i,-{ ) из регистра 17 и (i,-f) из регистра 18, производится вычитание, полученная разность (i,-i)-(f,-fj) записывается в регистр 16 для хранения.
6мк поступает через элемент ИЛИ 24 на управляющий вход считывания регистра 16, управлякищй вход делителя 21, через элемент ИЛИ 26 на управляющий вход считывания регистра 17 2РП17. По этой команде в делитель 21, включенный в работу, заносится (f,-i,) из регистра 17 и (,-f)-(i, -ij) из регистра 16, производится деление, результат деi.-iy
ления f -{ у( -1 поступает в умножитель 22,
7мк появляется на выходе дешифратора 15. Она поступает на зшрав- ляющий вход генератора 12, управляющий вход умножителя 22, управляющий вход считывания регистра 19. По этой микрокоманде генератор 12 останавливается и дальнейшее формирование ми- крокоманд прекращается, включается
в работу умножитель 22, в который заносится значение & из регис.тра 19. После умножения на выходе умно
X -
54286В
жителя 22 появляется конечный результат измерения
.-Ь
(i,-i4V(i.-fO (7) 5 Конечный результат измерения д не зависит от изменения параметров функции преобразования, а зависит только от точности определения длины намотки секции. Формула изобретения
Дифференциальный преобразователь линейных перемещений, содержащий ферромагнитный стержень, помещенный внутJ5 ри немагнитного цилиндра, размещенные на немагнитном цилиндре контурные и вспомогательные обмотки, коммутатор, входами подключенный к выходу обмоток, блок управления, свя2/J занный с управляюпщм входом коммутатора, автогенератор, подключенный к выходу коммутатора, вычислительный блок, о т л и ч а ю щ и и с .я тем что, с целью повьшения точности из5 мерений, обмотки выполнены в виде четырех идентичных секций, первый выход автогенератора подключен к управляющему входу блока управления, второй - к информационному входу вычислительд ного блока, блок управления снабжен четырьмя синхронизирующими выходами и подключен ими к соответствующим четьфем бходам вычислительного блока.
Редактор Н. Швьщкая
Составитель Ю. Петраковский
Техред Л.Кравчук Корректор М. Каксимишинец
Заказ 4709/АЗТираж 670Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4


| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой Фурье-преобразователь | 1982 |
|
SU1043663A1 |
| Микропрограммное устройство управления | 1988 |
|
SU1621027A1 |
| Мультимикропрограммная управляющая система | 1983 |
|
SU1133594A1 |
| Устройство для сопряжения ЦВМ с накопителями на магнитной ленте | 1985 |
|
SU1288708A1 |
| Устройство для вычисления матрицы функций | 1987 |
|
SU1439617A1 |
| Устройство для трансляции логических адресов в адреса памяти на магнитных дисках | 1981 |
|
SU966695A1 |
| Устройство для вычисления матрицы функций | 1987 |
|
SU1439618A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1992 |
|
RU2072548C1 |
| Устройство для управления и микродиагностики | 1981 |
|
SU968815A1 |
| Имитатор абонентов | 1983 |
|
SU1291987A1 |

Изобретение относится к измерительной технике и может использоваться для точного измереиия перемещений в различных областях маптно- строения. Целью изобретения является повышение точности измерений. При перемещении ферромагнитного стержня внутри цилиндра с размещенной на нем обмоткой в виде четырех идентичных сек1Щй на управляющий вход блока управления с автогенератора приходят сигналы, по которым блок управления управляет коммутатором. Коммутатор циклически подключает на вход автогенератора различные комбинации секций обмоток. Автогенератор вырабатывает сигналы частоты, которые пропорциональны текущему положению ферромагнитного стержня и соединению секций обмоток между собой. Измеряемая величина вычисляется в вычислительном блоке за четыре такта измерений, при этом -в вычислительном блоке за это время вырабатывается семь микрокоманд. Последовательность выработки микрокоманд определяется синхронизирующими импульсами, посту-J пающими в вычислительный блок с блока управления. Результат измерения не зависит от параметров функции преобразования, а определяется только точностью длины намотки секции. 1 ил. с W ю сд SD 00
| Устройство для измерения линейных перемещений | 1980 |
|
SU926519A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для ОХЛАЖДЕНИЯ И ПОГРУЗКИ ЧУШЕК | 0 |
|
SU388829A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
