1
Изобретение относится к специализированным средствам аналоговой вычислительной техники, предназначенной для обработки радиолокационных сигналов на основе корреля.ционного способа.
Известный способ состоит в перемножении принятого входного сигнала на задержанную копию излученного, задержка которого при «просмотре дальности изменяется дискретно через интервал корреляции псевдослучайного процесса, равный то - длительности элементарного импульса последовательности с последующим интегрированием. При этом вычисляется корреляционная функция периодической М-последовательности, которая имеет по дальности постоянный уровень боковых лепестков, равный 1/Л, где Л - количество элементарных импульсов в одном периоде последовательности.
Боковые лепестки сигнала, отраженного от близко расположенных целей, маскируют слабые отраженные сигналы от удаленных целей. Кроме того, боковые лепестки образуются от сигнала передатчика, который просачивается на вход приемника непосредственно (например, при работе радиолокатора на одну антенну).
Цель изобретения заключается в компенсации паразитного сигнала, обусловленного боковыми лепестками функции корреляции Псевдослучайной последовательности.
Эта цель достигается путем перемножения отраженного сигнала с сигналом, являющимся разностью двух сдвинутых одна относительно другой одинаковых псевдослучайных М-последовательностей, причем задержка одного из них прн «просмотре дальности изменяется днскретно через интервал корреляции псевдослучайного процесса при некоторой постоянной задержке другого сигнала.
Способ основан на следующих свойствах периодической псевдослучайной М-последовательностн:
1) произведение М-последовательности из положительных и отрицательных элемеитарных импульсов па эту же- последовательность, но сдвинутую на любое число элементарных импульсов, кроме периода, является М-последовательносгью того же вида,;. но имеющей другой сдвиг;
2) в периоде М-последовательности содержится 2-1 - 1 положительных и - отрицательных элементарных импульсов длительностью То.
На фиг. 1 представлена схема, по которой
может быть реализован предлагаемый способ, где обозначены: / - неремножптель; 2- вычитающее устройство; 3 - усредняющий блок; 4 - генератор псевдослучайной последовательности.
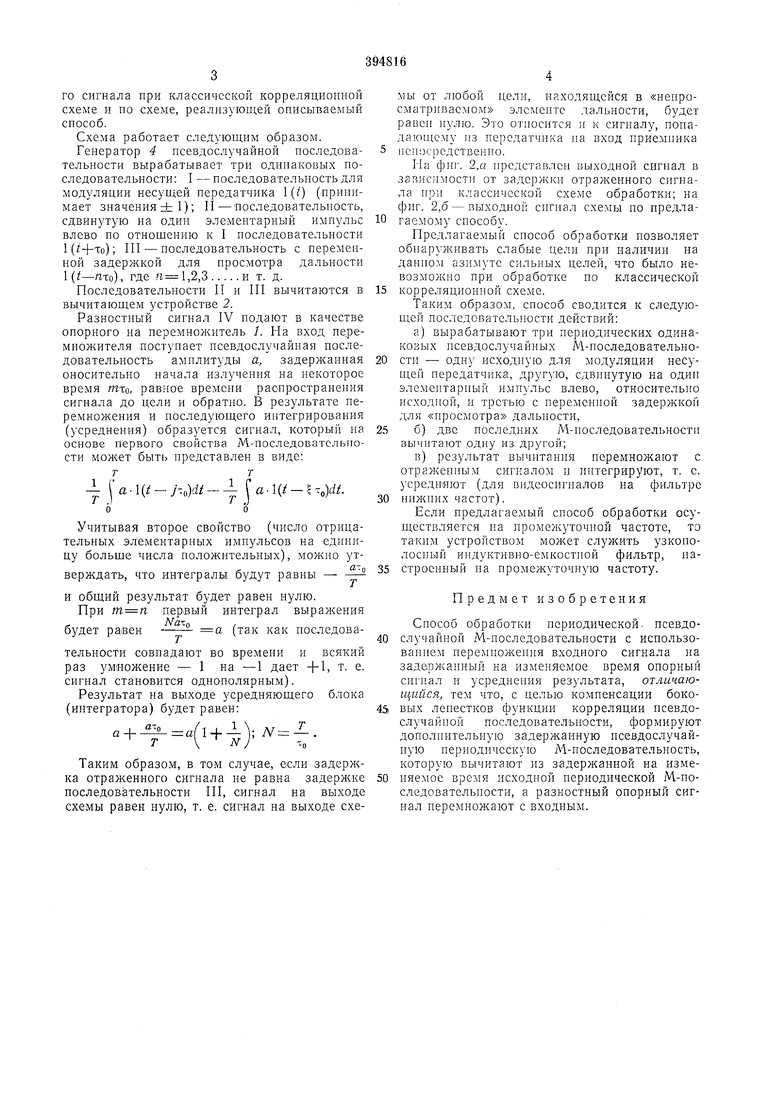
На фиг. 2 доказаны эпюры выходных снгналов в злвпснмости от задержки отраженного сигнала при классической корреляциоииои схеме и по схеме, реализуюп;ей описываемый способ.
Схема работает следующим образом.
Генератор 4 псевдослучайной последовательности вырабатывает три одипаковых последовательности: I - носледовательность для модуляции несущей передатчика (/) (нрипимает значения dz 1); И-последовательность, сдвинутую на один элементарный импульс влево по отнощению к I последовательности l(f-f-To); III - последовательность с неременной задержкой для просмотра дальности 1 (t-n%o), где п 1,2,3и т. д.
Последовательности II и III вычитаются в вычитающем устройстве 2.
Разностный сигнал IV нодают в качестве опор.ного на перемножитель 1. На вход не.ремножителя поступает псевдослучайная последовательность амплитуды а, задержанная оносительно начала излучения на некоторое время тто, равное времени распространения сигнала до цели и обратно. В результате перемножения и последующего интегрирования (усреднения) образуется сигнал, который на основе первого свойства М-последоватс.льпости может быть представлен в виде:
тт
a-(.,}dt- . оо
Учитывая второе свойство (число отрицательных элементарных импульсов на единицу больше числа положительных), можно утXл-й
верждать, что интегралы будут равны - --
и общий результат будет равен нулю, При первый интеграл выражения
, ,
будет равен а (так как последовательности совпадают во времени и всякий раз умножение - 1 на -1 дает , т. е. сигнал становится однополярным).
Результат на выходе усредняющего блока (интегратора) будет равен:
(,+А)х,
Таким образом, в том случае, если задержка отраженного сигнала не равна задержке последовательности III, сигнал на выходе схемы равен нулю, т. е. сигнал на выходе схемы от любой цели, находящейся в «непросматривасмом элементе дальности, будет равен пулю. Это относится и к сигналу, попадающему из передатчика на вход приемпика
непосредственно.
На фиг. 2,0, представлен выходной сигнал в зависимости от задержки отраженного сигнала ири классической схеме обработки; на фиг. 2,6 - выходной снгиал схемы по предлагаемому способу.
Нредлагаемый способ обработки позволяет обнаруживать слабые цели при наличии на данном азимуте сильных целей, что было невозможно при обработке по классической
корреляционной схеме.
Таким образом, способ сводится к следующей последователыюсти действий:
а) вырабатывают три перподических одинаковых исевдослучайных М-носледовательности - одну исходную для модуляции несущей передатчика, другую, сдвинутую на один элемеитариый импульс влево, относительно исходной, и третью с переменной задержкой для «просмотра дальности,
б) две последних М-носледовательности вычитают рдиу из другой;
в) результат вычитания перемножают с отражеппым сигналом и интегрируют, т. е. усредияют (для видеосигналов на фильтре
пижиих частот).
Если предлагаемый способ обработки осуществляется на промежуточной частоте, то таким устройством может служить узкополосный индуктивно-емкостной фильтр, пастроеиный на промежуточную частоту.
Предмет изобретения
Способ обработки периодической, псевдослучайной М-последовательности с использованием перемножения входного сигнала на задержанный на изменяемое время опорный сигнал и усреднения результата, отличающийся, тем что, с целью компенсации боковых лепестков функции корреляции псевдослучайной последователъиости, формируют дополнительную задержанную псевдослучайную периодическую М-иоследовательность, которую вычитают из задержанной на изменяемое время исходной периодической М-последовательиости, а разностный опорный сигнал перемножают с входным.
Вход
Постоянная jadep f a
к передать UK 1 аг. I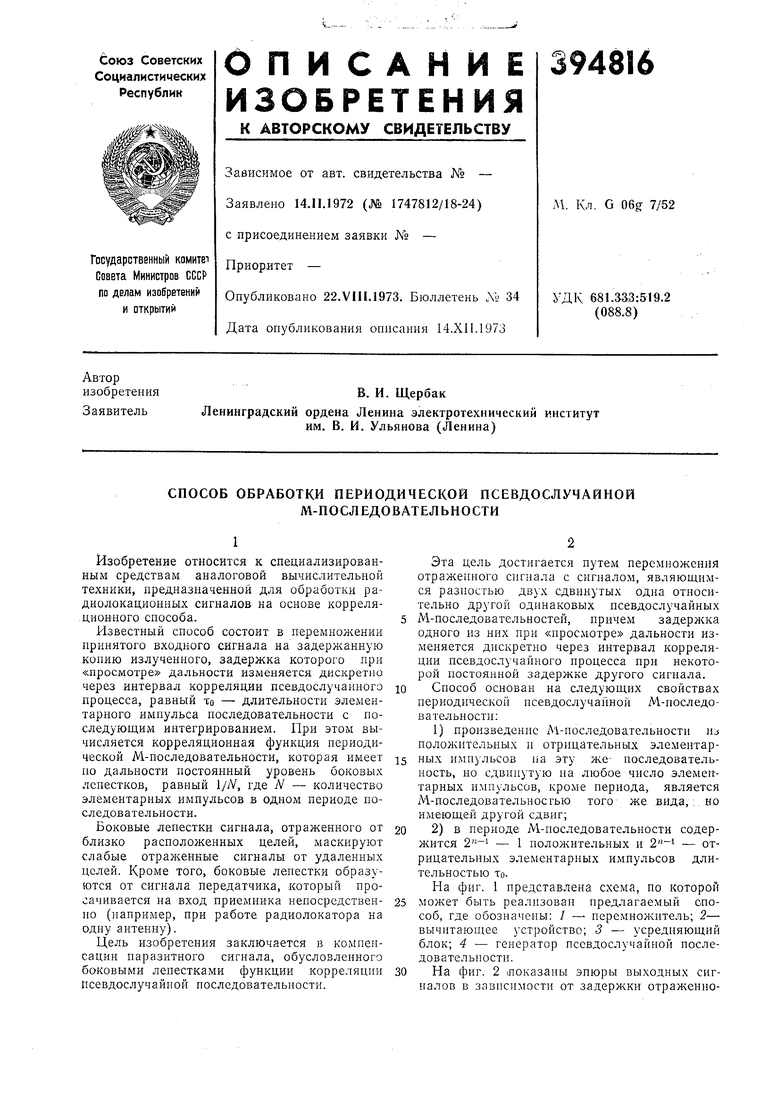
Вы А од но и сигнал а
Ji
дылодной с.игнал б
Фиг. 2
