Предлагаемый способ относится к области радиолокации и может быть использован в радиолокационной станции, предназначенной для выделения сигналов движущихся целей на фоне отражений от земной поверхности.
Известен способ, являющийся аналогом, включающий формирование (имеется в заявляемом объекте), излучение (имеется в заявляемом объекте), прием (имеется в заявляемом объекте) непрерывного монохроматического сигнала и который описан в книге Бакулев П.А. Радиолокация движущихся целей. М.: - Сов. радио, 1964, с. 107-110.
Однако указанный способ имеет тот недостаток, что при использовании такого сигнала невозможно измерение дальности до цели.
От этого недостатка свободен способ, являющийся аналогом, включающий формирование (имеется в заявляемом объекте), излучение (имеется в заявляемом объекте), прием (имеется в заявляемом объекте) непрерывного сигнала с частотной модуляцией (ЧМ), сравнение с излучаемым колебанием и фильтрацией необходимой частоты. Данный способ позволяет выделить сигнал доплеровской частоты на фоне отражений от земной поверхности и который описан в книге Бакулев П. А. Радиолокация движущихся целей. М.: - Сов. радио, 1964, с. 117-125.
Однако указанный способ имеет тот недостаток, что хотя он позволяет уменьшить просачивание зондирующего импульса на вход приемного устройства, он не позволяет определять дальность до цели.
Известен способ, являющийся аналогом, включающий формирование периодической последовательности сигналов на двух частотах, излучение (имеется в заявляемом объекте), прием, включающий фильтрацию, смещение по частоте, усиление (имеется в заявляемом объекте), перемножение сигналов друг на друга (имеется в заявляемом объекте) и который описан в книге Свистов В.М. Радиолокационные сигналы и их обработка. М.: - Сов. радио, 1978, с. 372 - 374.
Однако указанный способ, устраняя слепые скорости движущейся цели, имеет тот недостаток, что требует наличия двух передающих и двух приемных трактов, частоты излучения и частоты гетеродинов которых связаны между собой.
От этого недостатка свободен способ, являющийся аналогом, включающий в себя формирование периодической последовательности когерентных импульсов (имеется в заявляемом объекте), излучение (имеется в заявляемом объекте), прием (имеется в заявляемом объекте), детектирование, фильтрацию, усиление, индикацию и который описан в книге Бакулев П.А. Радиолокация движущихся целей. М.: - Сов. радио, 1964, с. 162-164.
Однако указанный способ имеет тот недостаток, что для повышения разрешающей способности по дальности приходится укорачивать длительность зондирующего импульса, а это приводит к ухудшению разрешающей способности по скорости.
Известен способ, являющийся аналогом, включающий формирование (имеется в заявляемом объекте), излучение (имеется в заявляемом объекте), прием (имеется в заявляемом объекте), накопление квадратурных составляющих пачки сигналов (имеется в заявляемом объекте), с последующей их модуляцией ЛЧМ сигналами с противоположными законами модуляции, сжатие полученных результатов обработки (имеется в заявляемом объекте), выделение огибающих (имеется в заявляемом объекте), вычитание их между собой (имеется в заявляемом объекте) с целью выделения сигналов движущихся целей (Патент РФ N 738450, кл. G 01 R 23/16. Устройство для обработки радиолокационных сигналов /В.И.Литюк, 1993).
Однако указанный способ имеет тот недостаток, что применяются простые сигналы, а это ограничивает возможность получения высокой разрешающей способности по дальности при одновременном выполнении требований обеспечения заданной максимальной дальности обнаружения.
Наиболее близким по технической сути и функциональному назначению является способ зондирования системой сложных фазоманипулированных (ФМн) сигналов с внутридискретной модуляцией, являющийся прототипом, позволяющий обеспечить подавление дальностных боковых лепестков (БЛ) системы сжатых сложных сигналов, заключается в том, что формируют (имеется в заявляемом объекте) последовательность фазоманипулированных сигналов, излучают (имеется в заявляемом объекте), принимают (имеется в заявляемом объекте), причем каждый дискрет излучаемого фазоманипулированного сигнала размерностью кода N каждого из последовательности фазоманипулированных сигналов, состоящей из 2N сигналов, подвергают внутридискретной частотной модуляции (имеется в заявляемом объекте), закон изменения которой определяется знаком кода фазоманипулированного сигнала (имеется в заявляемом объекте), законы изменения частоты внутридискретной частотной модуляции ортогональны или квазиортогональны (имеется в заявляемом объекте), диапазон изменения этих частот у всех дискретов одинаковый (имеется в заявляемом объекте) и все сигналы последовательности имеют одинаковую несущую частоту (имеется в заявляемом объекте), а при приеме каждый дискрет со своим законом внутридискретной частотной модуляции фазоманипулированного сигнала с размерностью кода N обрабатывают в системе согласованных фильтров (имеется в заявляемом объекте), каждый из которых согласован с законом изменения частоты соответствующего дискрета фазоманипулированного сигнала (имеется в заявляемом объекте), на выходе согласованных фильтров выделяют огибающие дискретов (имеется в заявляемом объекте), которым соответствует знак кода дискрета соответствующего фазоманипулированного сигнала (имеется в заявляемом объекте), причем последовательность огибающих, знаки которых соответствуют коду соответствующего фазоманипулированного сигнала, подвергают фильтрации в соответствующем согласованном фильтре фазоманипулированного сигнала (имеется в заявляемом объекте), сигналы, получаемые на выходах всех фильтров фазоманипулированных сигналов, соответствующим образом задерживают и синхронно суммируют на временном интервале, длительность которого определяется периодом повторения обрабатываемой последовательности, состоящей из 2N фазоманипулированных сигналов с внутридискретной частотной модуляцией, состоящей из двух групп по N фазоманипулированных сигналов в каждой группе, причем каждому фазоманипулированному сигналу из группы из N фазоманипулированных сигналов соответствует инверсный фазоманипулированный сигнал другой группы, состоящей из N фазоманипулированных сигналов, причем фазоманипулированные сигналы в каждой группе, состоящей из N фазоманипулированных сигналов, ортогональны друг другу (Патент РФ N 2107926. Способ импульсной радиолокации системой фазоманипулированных сигналов /Л. В.Литюк. Опубл. в Бюл. изобр. - 1998. N 9. - с. 377).
Однако указанный способ имеет тот недостаток, что невозможно осуществить выделение сигналов движущихся целей, принимаемых в аддитивной смеси, с сигналами, отраженными от подстилающей поверхности, которые находятся одновременно в одном элементе дальности с движущимися целями.
Технический результат заключается в возможности использования системы сложных ФМн сигналов с внутридискретной ЧМ для выделения сигналов движущихся целей, принимаемых в аддитивной смеси, с сигналами, отраженными от подстилающей поверхности, при этом достигается полное подавление БЛ во всей плоскости (τ,F) за исключением области ±τд относительно точки τ = 0, где τд - длительность дискрета сложных ФМн сигналов.
Технический результат достигается тем, что в способе селекции движущихся целей формируют, излучают, принимают систему фазоманипулированных сигналов с внутридискретной частотной модуляцией, причем каждый дискрет излучаемого фазоманипулированного сигнала размерностью кода N каждого из последовательности фазоманипулированных сигналов, состоящей из 2N сигналов, подвергают внутридискретной частотной модуляции, закон изменения которой определяется знаком кода фазоманипулированного сигнала, законы изменения частоты внутридискретной частотной модуляции ортогональны или квазиортогональны, диапазон изменения этих частот у всех дискретов одинаковый и все сигналы последовательности имеют одинаковую несущую частоту, а при приеме каждый дискрет со своим законом внутридискретной частотной модуляции фазоманипулированного сигнала с размерностью кода N обрабатывают в системе согласованных фильтров, каждый из которых согласован с законом изменения частоты соответствующего фазоманипулированного сигнала, причем последовательность огибающих, знаки которых соответствуют коду соответствующего фазоманипулированного сигнала, подвергают фильтрации в соответствующем согласованном фильтре фазоманипулированного сигнала, причем излучают последовательно во времени фазоманипулированные сигналы с внутридискретной частотной модуляцией таким образом, что нечетные номера сигналов в этой последовательности имеют максимальное кодовое расстояние по Хэммингу относительно четных следующих за ними сигналов, результаты их обработки в соответствующих согласованных фильтрах вычитают друг из друга, результаты вычитаний накапливают в двух группах, причем накопление осуществляется таким образом, чтобы в одной группе накопленных разностей все первые элементы были положительны (отрицательны), а в другой группе накопленных разностей все последние элементы были положительны (отрицательны), полученные группы накопленных разностей соответствующим образом задерживают и синхронно суммируют, и полученные результаты суммирования в двух группах синхронно перемножают между собой на временном интервале, длительность которого определяется периодом повторения обрабатываемой последовательности.
Рассмотрим предложенный способ выделения сигналов движущихся целей на фоне отражений от земной поверхности на примере H-матрицы, которую обозначим H4/8
Пусть на вход блока согласованных фильтров (СФ) одиночных ФМн сигналов (соответствующим образом настроенных) поступает периодическая последовательность импульсов системы сигналов с выходов блока согласованных фильтров дискретов (СФД) (Патент РФ N 2107926. Способ импульсной радиолокации системой фазоманипулированных сигналов /Л.В.Литюк. Опубл. в Бюл. изобр. - 1998. N 9. - с. 377) и которая может быть представлена в виде
где ΔI и ΔII - главные пики сжатых дискретов, имеющие противоположные направления частотно-временной зависимости на плоскости (τ,F) и знаки которых соответствуют знакам используемого ФМн кода;  - левые БЛ сжатых дискретов;
- левые БЛ сжатых дискретов;  - правые БЛ сжатых дискретов. Знаки БЛ совпадают со знаками главных пиков ΔI и ΔII соответственно.
- правые БЛ сжатых дискретов. Знаки БЛ совпадают со знаками главных пиков ΔI и ΔII соответственно.
Матрица импульсных характеристик согласованных фильтров ФМн сигналов будет иметь вид
Следовательно, матрица откликов будет иметь вид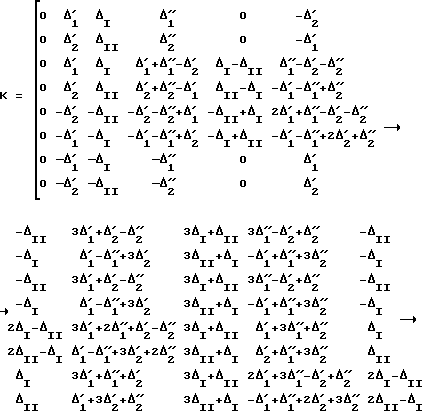
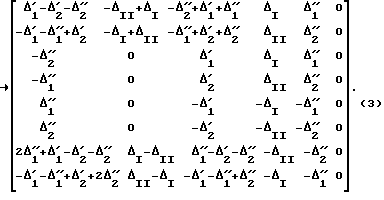
В дальнейшем опустим в матрице (3) нулевые крайние столбцы, поскольку это не оказывает влияния на рассматриваемый алгоритм обработки. Произведем поэлементное вычитание из нечетных строк матрицы (3) тех ее четных строк, которые имеют максимальное кодовое расстояние по Хэммингу друг относительно друга. В результате получается разностная матрица ΔK/ , которая будет иметь вид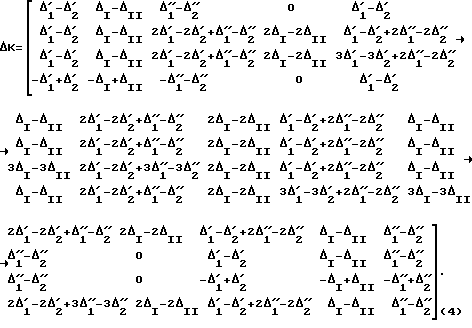
Выделяем разностные строки матрицы ΔK , у которой знаки обоих крайних разностных элементов в строках положительны. Данные, описываемые этими строками, в дальнейшей обработке используются без изменений.
На следующем этапе путем умножения всех элементов соответствующих строк на -1 устанавливаются положительными знаки у тех элементов крайнего левого столбца матрицы (4), знаки которых были отрицательны. В результате, получается матрица ΔKЛ, которая имеет одинаковые величины и знаки левых крайних элементов и принимает вид
После этого производится суммирование элементов столбцов матрицы ΔKЛ, что соответствует накоплению результатов обработки всей пачки импульсов. В результате получаем матрицу-строку ΔKЛC, у которой левые элементы относительно центрального, центральный элемент и элемент, описывающий БЛ, прилегающий к центральному элементу справа, не равны нулю, а все элементы, расположенные далее справа, равны нулю, и которая имеет вид
Далее умножаем на величину -1 те строки матрицы (4), у которых правые крайние элементы имеют противоположные знаки относительно знаков элементов, которые расположены в тех ее строках, где они имеют одинаковые знаки с обеих сторон строк. В результате получается матрица ΔKП =, которая имеет одинаковые величины и знаки у правых крайних элементов и которая имеет вид
Аналогично, проводя суммирование элементов столбцов матрицы ΔKП, что также соответствует накоплению результатов обработки, получаем матрицу-строку ΔKПC, у которой правые элементы относительно центрального, центральный элемент и элемент, описывающий БЛ и прилегающий к центральному элементу слева, не равны нулю, а все элементы, расположенные далее слева, равны нулю, и которая в результате принимает вид
Таким образом, сформированы две группы откликов, расположение которых на одноименных позициях на временной оси описывается выражениями (5) и (6). Переписывая (5) и (6) в виде диагональных матриц, главные диагонали которых являются элементами матриц-строк ΔKЛС и ΔKПС соответственно, и перемножая эти диагональные матрицы друг на друга, получим диагональную матрицу, имеющую вид
Из последнего выражения видно, что не равны нулю элементы, расположенные на главной диагонали, описывающие местоположение центрального пика, и БЛ, расположенных слева и справа относительно центрального.
Очевидно, что в случае отсутствия доплеровского сдвига у коррелированной помехи, коэффициент корреляции которой стремится к единице, происходит полное вычитание как главных пиков, так и соответствующих БЛ.
В случае наличия доплеровского сдвига, что соответствует сигналу движущейся цели, вследствие противоположного характера частотно-временных зависимостей тел неопределенности (ТН) соответствующих дискрет, эти сигналы не вычитаются друг из друга и выделяются.
Далее рассмотрим предложенный способ на примере H-матрицы, которую обозначим H8/16
Аналогичным образом на вход блока СФ одиночного ФМн сигнала (соответствующим образом настроенного) поступает последовательность, состоящая из отсчетов принадлежащих БЛ сжатых дискретов ФМн сигнала и главным пикам этих дискретов, знаки которых соответствуют кодам обрабатываемого сигнала и соответствующим образом совпадают. В этом случае, матрицу X можно представить в виде X = Xн + Xч, где Xн описывает БЛ сжатых дискретов, Xч описывает главные пики сжатых дискретов, причем в первой матрице нулевые элементы соответствуют главным пикам сжатых дискретов, а во второй матрице нулевые элементы соответствуют БЛ сжатых дискретов. Поскольку знаки не нулевых элементов крайних не нулевых столбцов обеих матриц совпадают, то без потери общности можно рассматривать только вторую матрицу Xч.
Нулевые столбцы в данной матрице можно опустить, т.к. они не оказывают влияния на дальнейший ход рассуждения, поскольку как было показано выше, знаки у элементов крайних столбцов матрицы Xн совпадают со знаками элементов крайних столбцов матрицы Xч.
Тогда матрица Xч может быть переписана в виде матрицы X'ч
Следовательно матрица откликов на сигналы X'ч, описываемая матрицей автокорреляционных функций, будет иметь вид
Аналогичным образом, производя поэлементное вычитание из нечетных строк матрицы (8) ее четных строк, получим матрицу  , которая имеет вид
, которая имеет вид
Аналогично, как было показано выше, выделяем разностные строки матрицы ΔK′, у которой знаки обоих крайних разностных элементов в строках положительны, и в дальнейшей обработке используются без изменений.
Далее путем умножения всех элементов соответствующих строк на -1 устанавливаются положительными знаки у тех элементов крайнего левого столбца матрицы (9), знаки которых были отрицательны. В результате получаем матрицу  , которая имеет вид
, которая имеет вид
Аналогично, как описано выше, производится суммирование элементов столбцов матрицы  и получается матрица-строка
и получается матрица-строка  , имеющая вид
, имеющая вид
Далее умножаем на величину -1 те строки матрицы (9), у которых правые крайние элементы имеют противоположные знаки относительно знаков элементов, которые расположены в тех ее строках, где они имеют одинаковые знаки с обеих сторон строк. В результате получается матрица  , которая имеет одинаковые величины и знаки у правых крайних элементов и которая имеет вид
, которая имеет одинаковые величины и знаки у правых крайних элементов и которая имеет вид
Аналогичным образом, описанным выше, проводим суммирование элементов столбцов матрицы  и получаем матрицу-строку
и получаем матрицу-строку  , имеющую вид
, имеющую вид
Таким образом, сформированы две группы откликов, расположение которых на одноименных позициях на временной оси описывается выражениями (10) и (11).
Переписывая (10) и (11) в виде диагональных матриц, как было показано выше, и перемножая, получаем диагональную матрицу, имеющую вид
Из последнего выражения видно, что не равен нулю элемент, расположенный на главной диагонали, описывающий местоположение центрального пика.
Также очевидно, что не будут равны нулю позиции, расположенные рядом с главным пиком и описывающие БЛ сжатых дискретов аналогично тому, как показано в (7).
Очевидно, что в случае отсутствия доплеровского сдвига у коррелированной помехи, коэффициент корреляции которой стремится к единице, происходит полное вычитание главных пиков и БЛ.
В случае наличия доплеровского сдвига, что соответствует наличию сигнала движущейся цели, вследствие противоположного характера частотно-временных зависимостей ТН соответствующих дискретов, эти сигналы не полностью вычитаются друг из друга и выделяются.
Аналогичным образом могут быть получены результаты и для систем сигналов описываемых H-матрицами других размеров.
В отличие от способа зондирования системой ФМн сигналов с внутридискретной модуляцией, описанного в Патенте РФ N 2107926. Способ импульсной радиолокации системой фазоманипулированных сигналов /Л.В.Литюк. Опубл. в Бюл. изобр. - 1998. N 9. - с. 377, предложенный способ позволяет выделить сигналы движущихся целей на фоне отражений от земной поверхности.
Проведенный анализ предложенного способа зондирования пространства и сравнение его с аналогами и прототипом позволяет сделать вывод о том, что предлагаемый способ соответствует критериям "новизна", "изобретательский уровень", "промышленная применимость".
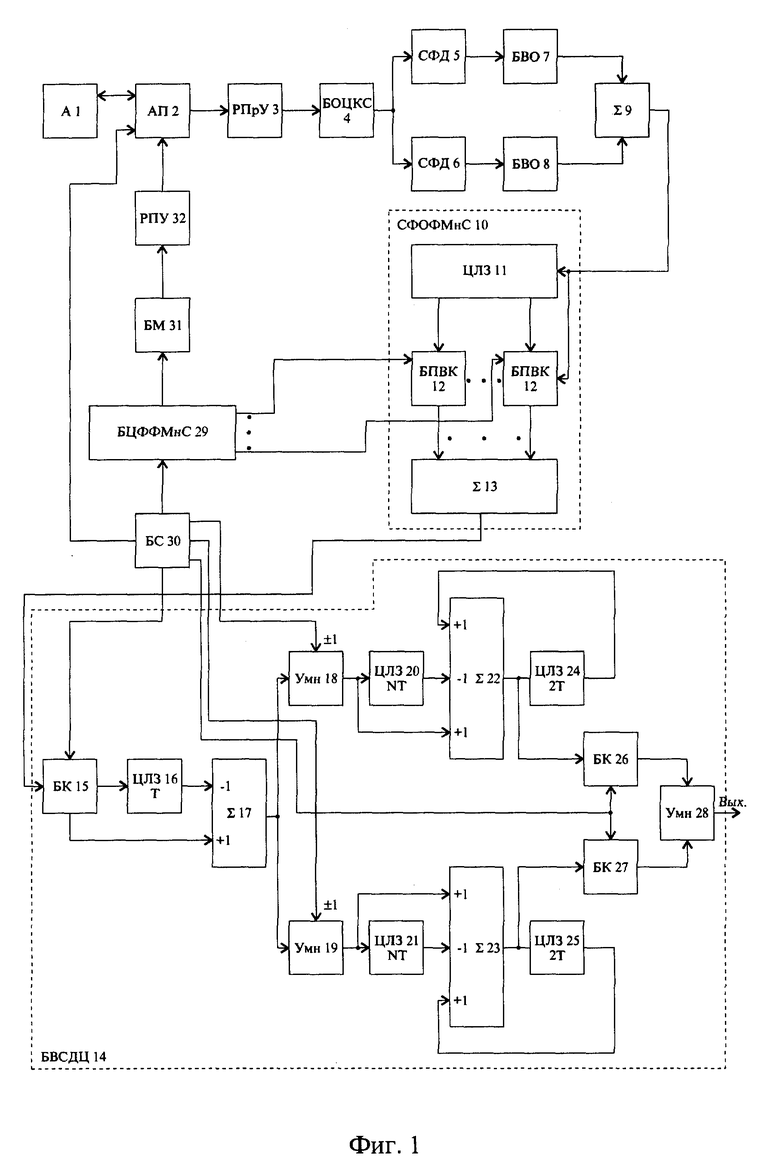
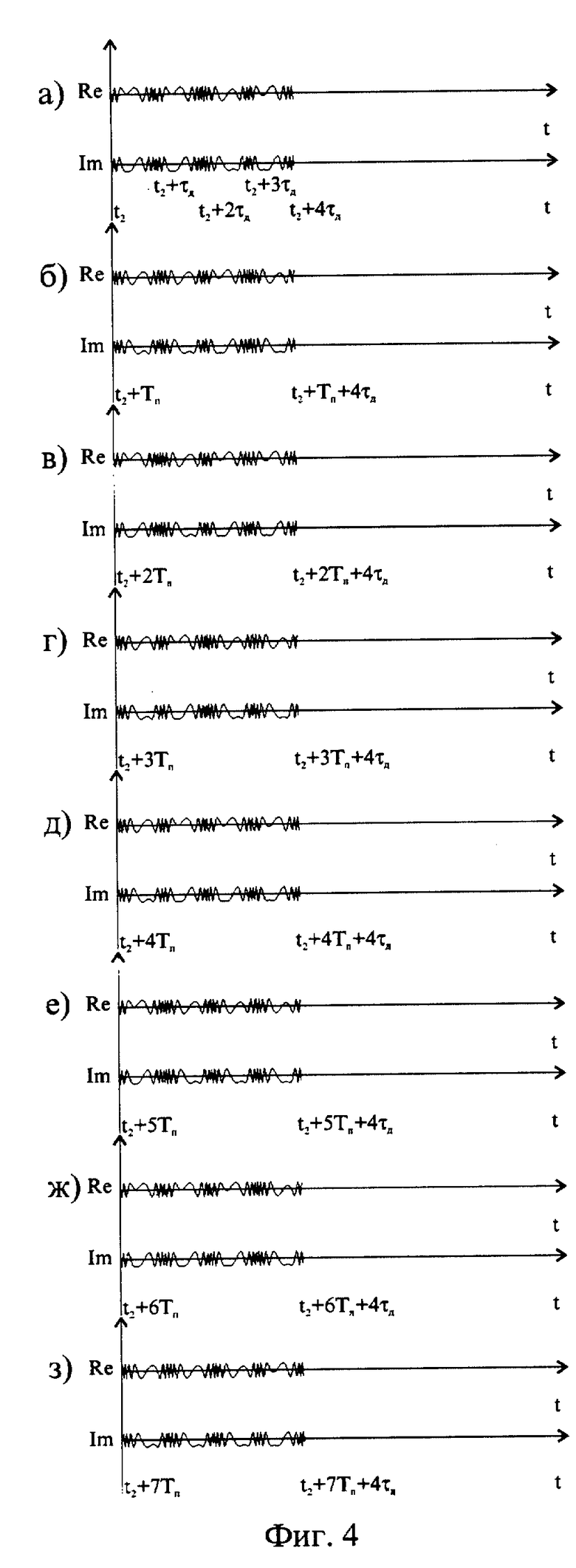
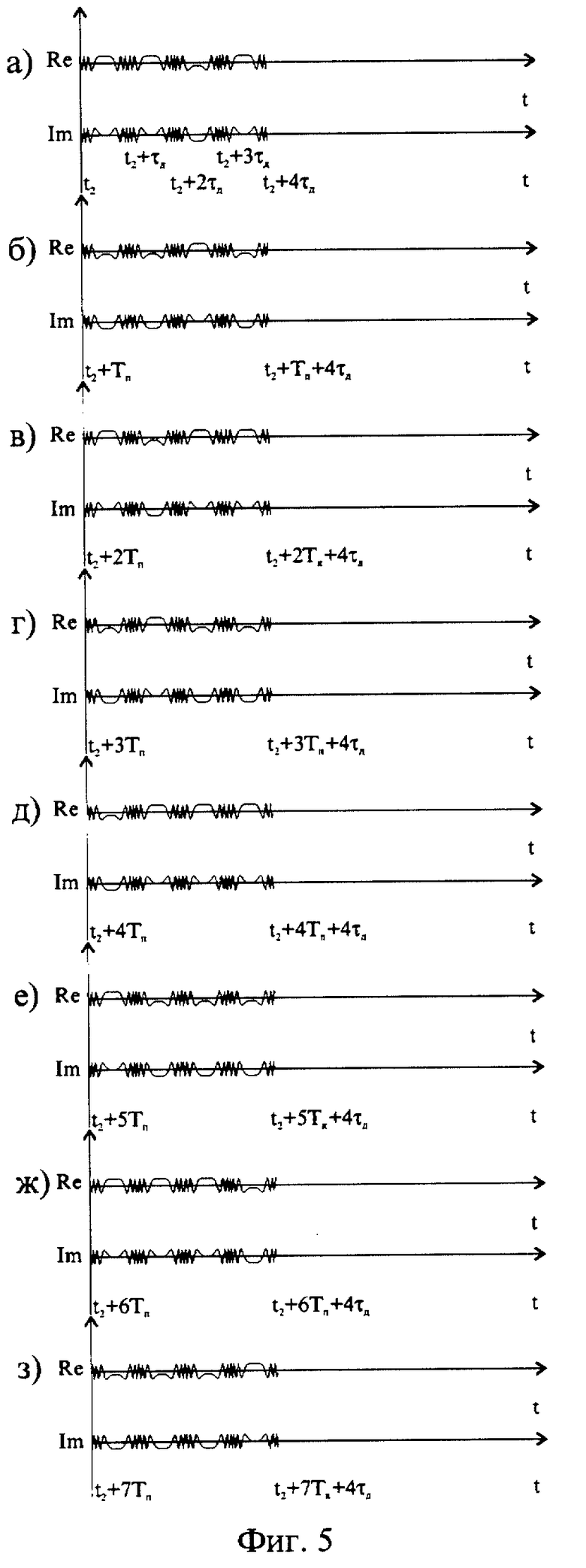
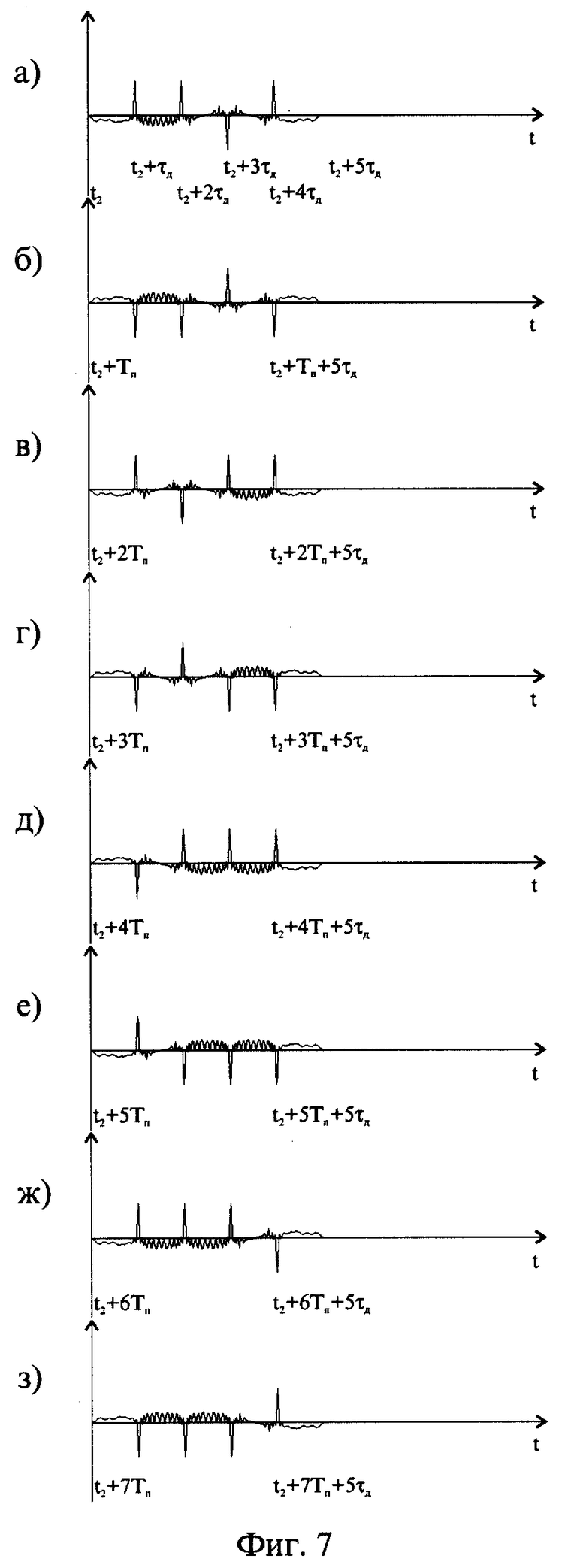
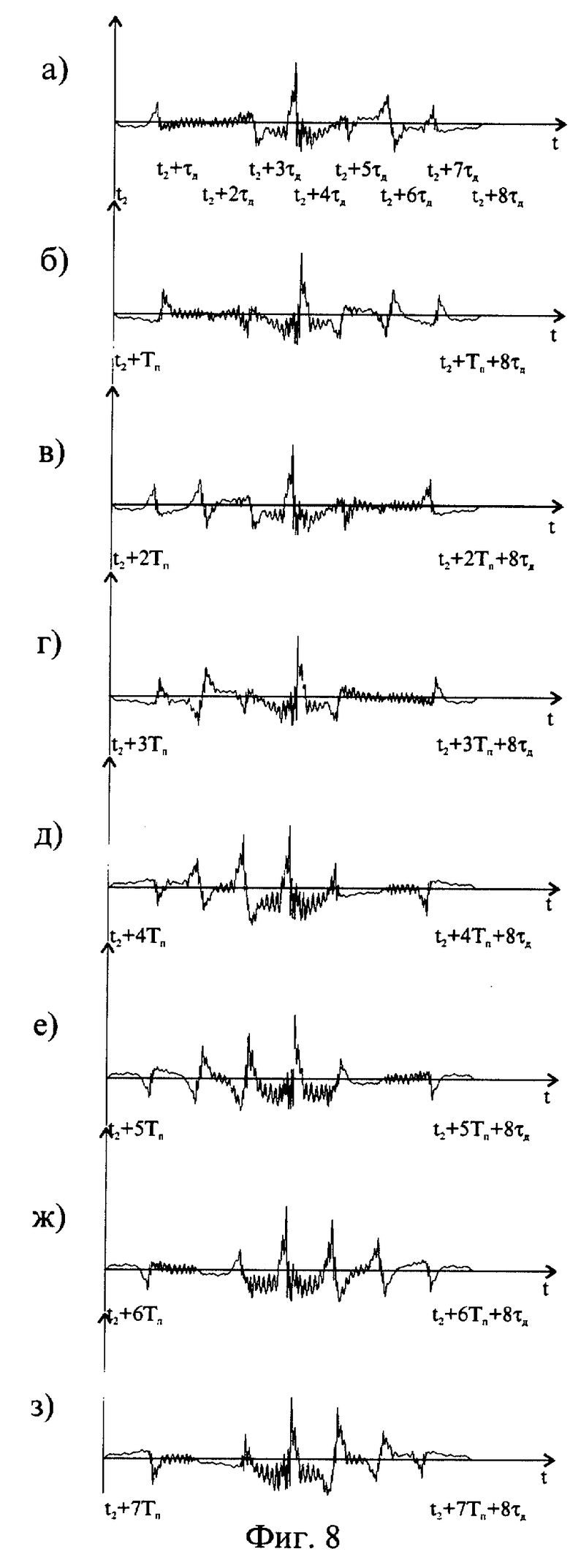
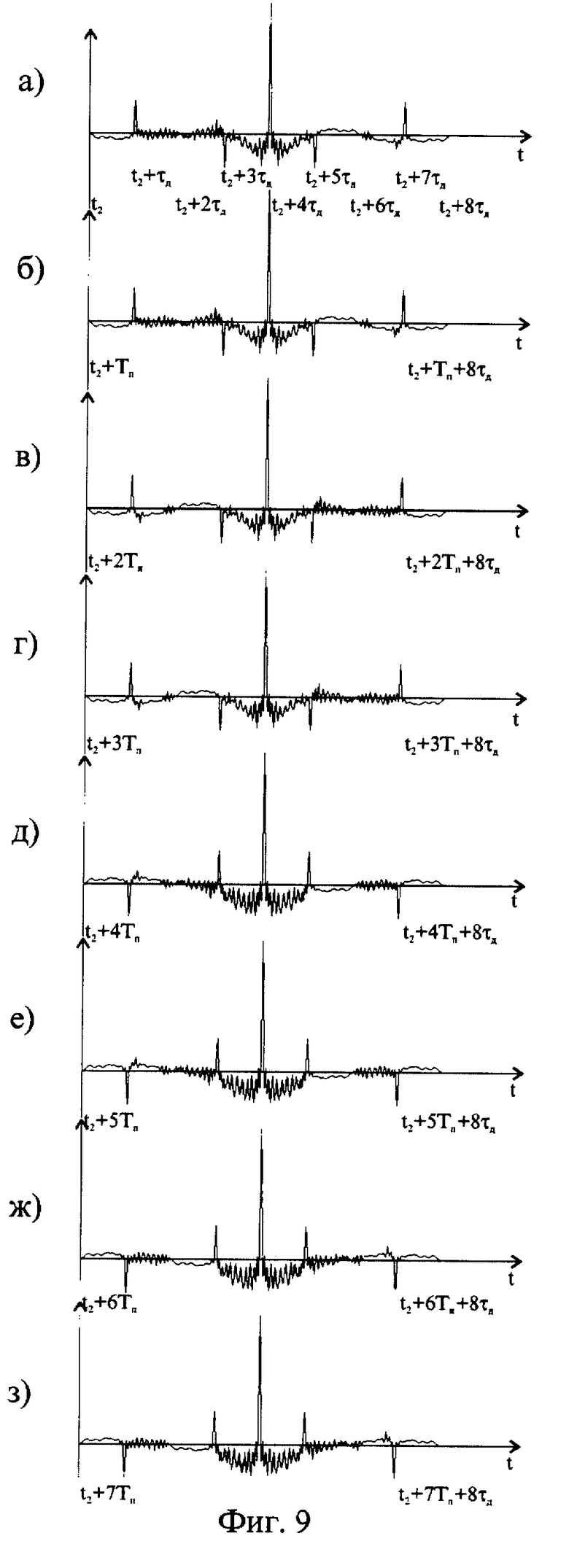
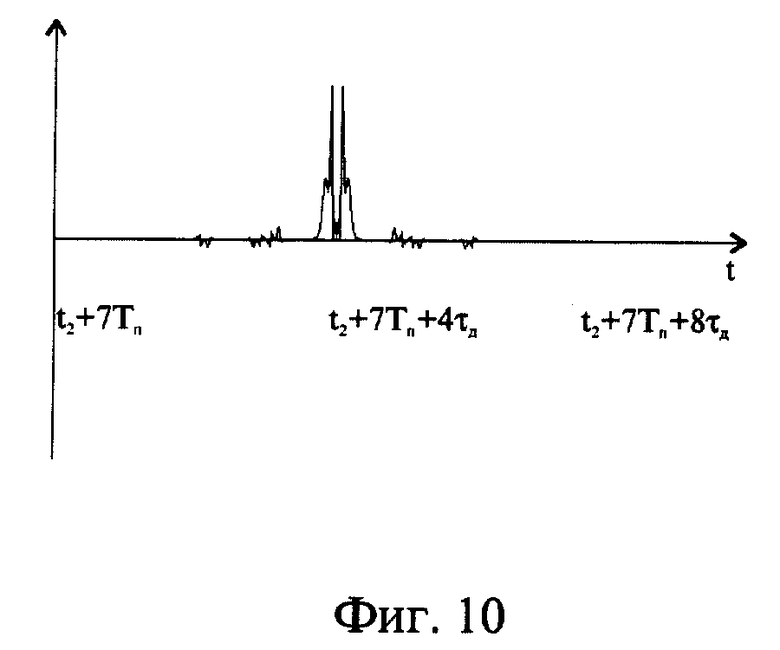
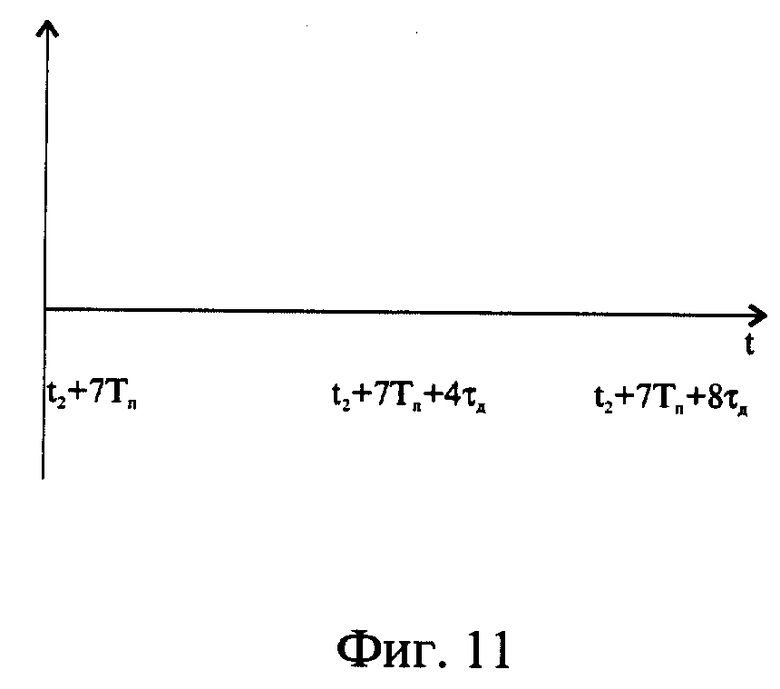
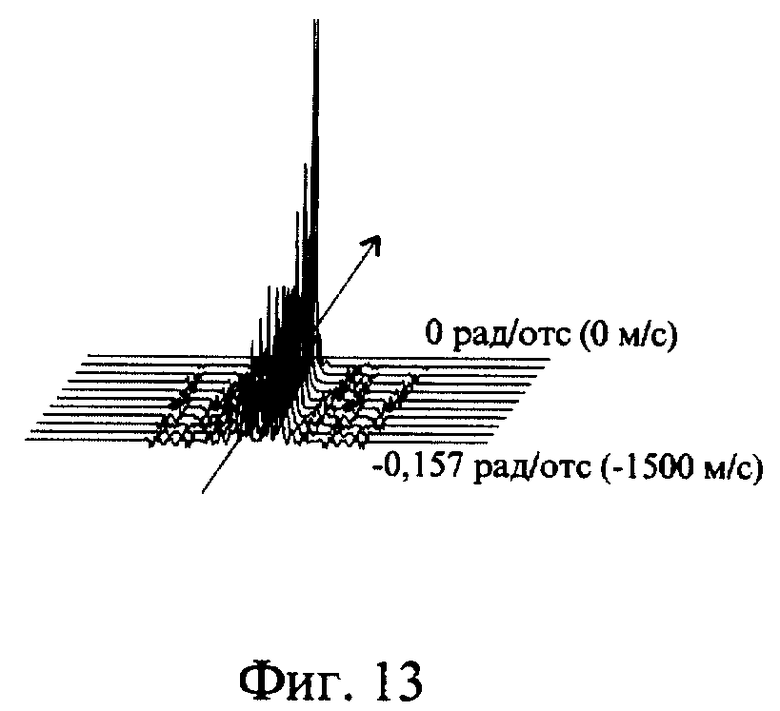
На фиг. 1 приведена структурная схема устройства, реализующего предлагаемый способ; на фиг. 2 - временные диаграммы кодов, формируемых блоком цифрового формирования ФМн сигнала; на фиг. 3 - временные диаграммы в виде квадратурных составляющих ФМн сигнала на выходе блока модуляции; на фиг. 4 - временные диаграммы в виде квадратурных составляющих ФМн на выходе блока формирования цифровых квадратурных составляющих 4 с доплеровским сдвигом; на фиг. 5 - временные диаграммы в виде квадратурных составляющих ФМн на выходе блока формирования цифровых квадратурных составляющих 4 без доплеровского сдвига; на фиг. 6. - временные диаграммы на выходе сумматора (вычитателя) 9 с доплеровским сдвигом; на фиг. 7. - временные диаграммы на выходе сумматора (вычитателя) 9 без доплеровского сдвига; на фиг. 8 - временные диаграммы на выходе согласованного фильтра ФМн сигнала 10 с доплеровским сдвигом; на фиг. 9 - временные диаграммы на выходе согласованного фильтра ФМн сигнала 10 без доплеровского сдвига; на фиг. 10 - результирующий отклик обработки пачки, состоящей из восьми сигналов на выходе устройства при наличии доплеровского сдвига; на фиг. 11 - результирующий отклик обработки пачки, состоящей из восьми сигналов на выходе устройства при отсутствии доплеровского сдвига; на фиг. 12 - отклики системы на сигналы движущихся целей, имеющих положительный доплеровский сдвиг; на фиг. 13 - отклики системы на сигналы движущихся целей, имеющих отрицательный доплеровский сдвиг.
Устройство, реализующее предложенный способ (фиг. 1), содержит: антенну (А) 1, выход которой через антенный переключатель (АП) 2 соединен со входом радиоприемного устройства (РПрУ) 3, выход которого соединен со входом блока образования цифровых квадратурных составляющих (БОЦКС) 4, выход которого соединен с соответствующими входами двух параллельно соединенных каналов, каждый из которых состоит из последовательно соединенных согласованных фильтров дискретов (СФД) 5 и 6, выходы которых соединены через блоки выделения огибающей (БВО) 7 и 8 со входами сумматора (вычитателя) 9 (Σ9), выход которого соединен с согласованным фильтром одиночного фазоманипулированного сигнала (СФОФМнС) 10, состоящего из цифровой линии задержки (ЦЛЗ) 11 с N отводами, каждый из которых через соответствующий блок перестраиваемого весового коэффициента (БПВК) 12 соединен с соответствующим входом сумматора 13 (Σ13), выход которого является выходом СФОФМнС 10, и который соединен с блоком выделения сигналов движущихся целей (БВСДЦ) 14, состоящего из блока коммутации (БК) 15, вход которого соединен с выходом СФОФМнС 10, один из выходов БК 15 соответствующим образом соединен с ЦЛЗ 16 с временем задержки, равным Tп, а второй выход соединен с одним из входов сумматора 17 (Σ17), а выход ЦЛЗ 16 соединен с другим входом Σ17 и выход которого соединен с соответствующими входами двух параллельно соединенных каналов, каждый из которых состоит из последовательно соединенных умножителей 18 (Умн 18) и 19 (Умн 19), выходы которых соединены с ЦЛЗ 20 и ЦЛЗ 21 с временем задержки, равным NTп каждая, и с трехвходовыми сумматорами Σ22 и Σ23 соответственно, а выходы ЦЛЗ 22 и 23 соответственно соединены со вторыми входами сумматора Σ22 и Σ23, и выходы которых соединены со входами ЦЛЗ 24 и ЦЛЗ 25 с временем задержки, равным 2Tп каждая, и со входами БК 26 и БК 27, выходы которых соединены соответствующим образом с умножителем 28 (Умн 28), выход которого является выходом устройства, выходы ЦЛЗ 24 и ЦЛЗ 25 соединены соответствующим образом с третьими входами Σ22 и Σ23, причем управляющие входы всех БПВК 12 соединены с соответствующими выходами блока цифрового формирования фазоманипулированного сигнала (БЦФФМнС) 29, соединенного по управляющему входу с соответствующим выходом блока синхронизации (БС) 30, второй выход которого соединен с управляющим входом АП 2, второй вход которого соединен с выходом радиопередающего устройства (РПУ) 32, соединенного по входу через блок модуляции (БМ) 31 с выходом БЦФФМнС 29, причем БС 30 соединен с соответствующими управляющими входами БК 15, Умн 18 и Умн 19, БК 26 и БК 27, причем БС 30 соединен с соответствующими выходами БОЦКС 4, с блоками СФД5 и СФД 6, БВО 7 и БВО 8, ЦЛЗ 11, ЦЛЗ 16, ЦЛЗ 20 и ЦЛЗ 21, ЦЛЗ 24 и ЦЛЗ 25 и которые на фиг. 1 не показаны.
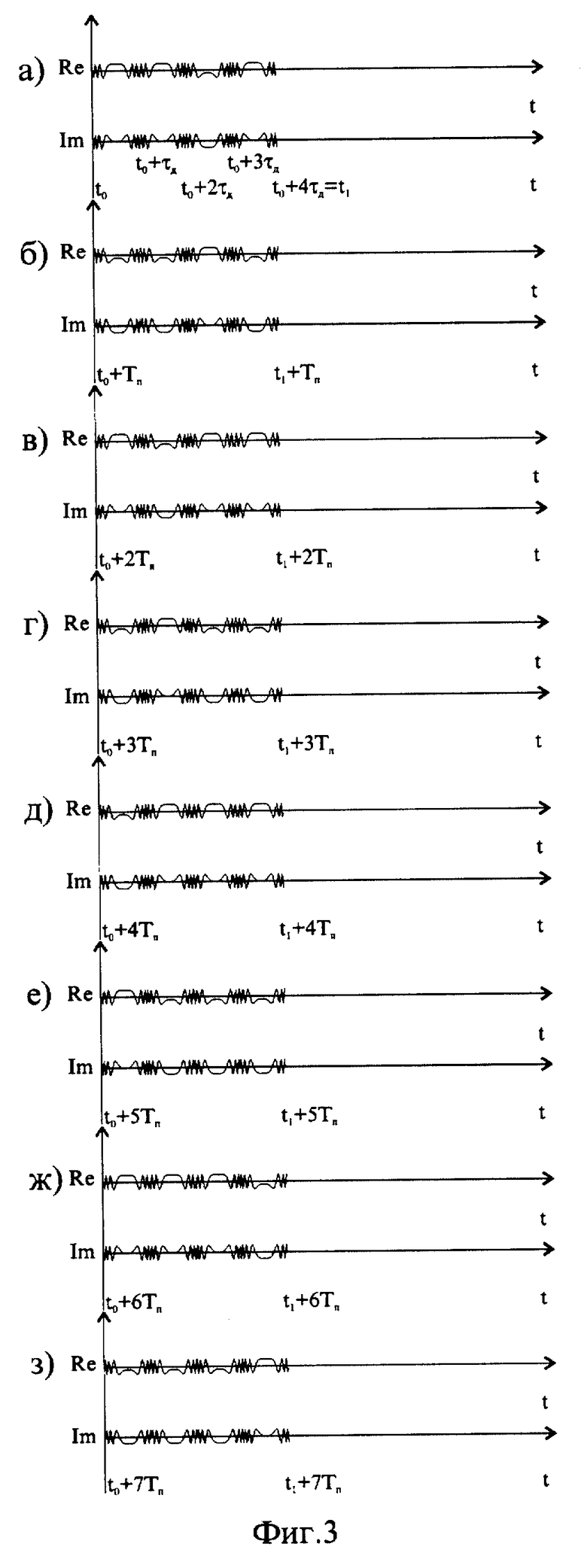
Устройство, реализующее предлагаемый способ и изображенное на фиг. 1, работает следующим образом. В момент времени t = t0, АП 2, управляемый сигналом со второго входа БС 30, подключает к выходу РПУ 32 антенну А 1. В тот же самый момент времени управляющий сигнал с первого входа БС 30 поступает на БЦФФМнС 29, который формирует соответствующий код ФМн сигнала (например, пусть первым сигналом будет сигнал, имеющий код: 1, 1, -1, 1). Сигналы с выходов БЦФФМнС 29 поступают на БПВК 12 и устанавливают в них соответствующие весовые коэффициенты. Одновременно по выходу БЦФФМнС 29, сформированный разряд за разрядом код последовательно во времени поступает на БМ 31. Длительность во времени каждого разряда кода равна τд =. За длительность этого временного интервала, равного τд, в БМ 31 вырабатывается сигнал с непрерывной фазовой функцией, закон изменения которой определяется параметрами кода ФМн сигнала, поступающего с выхода БЦФФМнС 29. Сформированный в БМ 31 подобным образом сложный ФМн сигнал поступает на РПУ 32 и модулирует соответствующим образом несущую частоту и через АП 2 излучается А 1 в пространство. На фиг. 2а изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3а изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 = 4τд, соответствующий моменту времени окончания излучения сформированного зондирующего сигнала, БС 30 выдает управляющий сигнал, по которому АП 2 подключает ко входу РПрУ 3 антенну А 1. Устройство начинает работать на прием.
Пусть в момент времени t = t2 ≥ t1 на вход устройства приходит отраженный сигнал. Этот сигнал, пройдя через А 1 и АП 2, поступит на РПрУ 3, где произойдет его соответствующее усиление и перенос на промежуточную частоту (ПЧ). С выхода усилителя ПЧ (УПЧ) принятый сигнал поступит на вход БОЦКС 4, на выходе которого появятся квадратурные составляющие комплексной огибающей принимаемого сигнала с доплеровским сдвигом (фиг. 4а), без доплеровского сдвига (фиг. 5а). Эти квадратурные составляющие представляют собой многоразрядные отсчеты, частота следования которых определяется условиями теоремы Котельникова. Отсчеты квадратурных составляющих комплексного сигнала поступают на СФД 5 и СФД 6, где происходит согласованная фильтрация отдельных дискрет принимаемых сигналов. В том случае, если используемые законы внутридискретной модуляции непрерывным ЧМ сигналом являются ортогональными, то к моменту окончания каждого дискрета на выходах СФД 5 и СФД 6 произойдет полное разделение этих сигналов. В том случае, если используются квазиортогональные законы внутридискретной модуляции непрерывным ЧМ сигналом, на выходах того СФД, который в данный момент времени не является согласованным для принимаемого сигнала, будет выходной отклик, не равный нулю и пропорциональный значению интеграла свертки принимаемого дискрета с импульсной характеристикой этого фильтра. Соответствующим образом обработанные дискреты в СФД 5 и СФД 6 поступают на БВО 7 и БВО 8, на выходах которых выделяются огибающие прошедших СФД 5 и СФД 6 сигналов. Пусть законы изменения частоты отдельных дискретов описываются выражениями:

где М - определяет количество отсчетов квадратурных составляющих на одном дискрете, N - число, определяющее величину бина, n - номер текущего отсчета. Обычно полагают М << N.
Эти два закона описывают сигналы, полные фазовые функции которых являются кубическими параболами с противоположными законами изменения частоты. Подобные виды ЧМ могут рассматриваться как квазиортогональные.
С выходов БВО 7 и БВО 8 сжатые сигналы поступают на сумматор (вычитатель) 9, на выходе которого образуется сигнал, местоположение и знаки пиков которого соответствуют ФМн коду, выработанному БЦФФМнС 29. На фиг. 6а показан сигнал, получающийся на выходе Σ9 при наличии доплеровского сдвига, а на фиг. 7а - при отсутствии доплеровского сдвига. Сформированный указанным образом сигнал поступает на СФОФМнС 10 и записывается в ЦЛЗ 11, вход которой является входом этого фильтра. Соответствующим образом обрабатываясь в этом фильтре, который является согласованным для одиночного ФМн сигнала, на выходе Σ13, являющегося выходом этого фильтра, появляется сжатый ФМн сигнал, который имеет вид, изображенный на фиг. 8а (с доплеровским смещением) и на фиг. 9а (без доплеровского смещения). Этот сигнал поступает на вход БК 15, который является входом БВСДЦ 14 и управляется БС 30, и с выхода которого сигнал поступает на ЦЛЗ 16 с временем задержки, равным Tп.
В момент времени t = t0 + Tп аналогичным образом, описанным выше, формируется код второго ФМн сигнала, имеющий максимальное расстояние по Хэммингу относительно первого. Таким кодом будет: -1, -1, 1, -1. На фиг. 2б изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3б изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 + Tп устройство начинает работать на прием.
Пусть в момент времени t = t2 + Tп ≥ t1 + Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогичным образом, как описано выше, что иллюстрируется фиг. 4б, 5б, 6б, 7б, 8б, 9б. Этот сигнал с выхода Σ13 поступает на вход БК 15, который управляется БС 30. С выхода БК 15 сигнал поступает на Σ17, где вычитается с задержанным на Tп первым сигналом. Затем полученная разность подается на два управляемых БС 30 умножителя Умн 18 и Умн 19, где перемножаются с +1. С выходов этих умножителей результат перемножения поступает в первом канале на ЦЛЗ 20 с временем задержки, равным 8Tп, и на Σ22, а во втором канале поступает на ЦЛЗ 21 с временем задержки 8Tп и на Σ23. Эти разностные сигналы, пройдя через Σ22 и Σ23, поступают на ЦЛЗ 24 и ЦЛЗ 25 с временем
задержки 2Tп и в этот же момент времени поступают на БК 26 и БК 27 в первом и втором каналах соответственно. На выход сигналы первого и второго каналов не проходят, т.к. это связано с тем, что БК 26 и БК 27, управляемые БС 30, выключены, поскольку не закончен процесс обработки всей формируемой и принимаемой пачки импульсов и который можно назвать переходным.
В момент времени t = t0 + 2Tп аналогичным образом, описанным выше, формируется код ФМн сигнала (например, пусть третьим сигналом будет сигнал, имеющий код: 1, -1, 1, 1). На фиг. 2в изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3в изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 + 2Tп, устройство начинает работать на прием.
Пусть в момент времени t = t2+ 2Tп ≥ t1 + 2Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогичным образом, как описано выше, что иллюстрируется фиг. 4в, 5в, 6в, 7в, 8в, 9в. Этот сигнал поступает на вход БК 15, который является входом БВСДЦ 14 и управляется БС 30, и с выхода которого сигнал поступает на ЦЛЗ 16 с временем задержки, равным Tп.
В момент времени t = t0 + 3Tп аналогичным образом, описанным выше, формируется код четвертого ФМн сигнала, имеющий максимальное расстояние по Хэммингу относительно третьего. Таким кодом будет: -1, 1, -1, -1. На фиг. 2г изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3г изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 + 3Tп устройство начинает работать на прием.
Пусть в момент времени t = t2 + 3Tп ≥ t1 + 3Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогичным образом, как описано выше, что иллюстрируется фиг. 4г, 5г, 6г, 7г, 8г, 9г. Этот сигнал с выхода Σ13 поступает на вход БК 15, который управляется БС 30. С выхода БК 15 сигнал поступает на Σ17, где вычитается с задержанным на Тп третьим сигналом. Затем полученная разность подается на два управляемых БС 30 умножителя Умн 18 и Умн 19, где перемножаются с +1. С выходов этих умножителей результат перемножения поступает в первом канале на ЦЛЗ 20 с временем задержки, равным 8Tп, и на Σ22, а во втором канале поступает на ЦЛЗ 21 с временем задержки 8Tп и на Σ23. Эти разностные сигналы, пройдя через Σ22 и Σ23, поступают на ЦЛЗ 24 и ЦЛЗ 25 с временем задержки 2Tп и в этот же момент времени поступают на БК 26 и БК 27 в первом и втором каналах соответственно. На выход сигналы первого и второго каналов не проходят, т.к. это связано с тем, что БК 26 и БК 27, управляемые БС 30, выключены, поскольку не закончен процесс обработки всей формируемой и принимаемой пачки импульсов и который можно назвать переходным.
В момент времени t = t0 + 4Tп аналогичным образом, описанным выше, формируется код пятого ФМн сигнала (например, пусть пятым сигналом будет сигнал, имеющий код: -1, 1, 1, 1). На фиг. 2д изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3д изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 + 4Tп устройство начинает работать на прием.
Пусть в момент времени t = t2 + 4Tп ≥ t1 + 4Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогичным образом, как описано выше, что иллюстрируется фиг. 4д, 5д, 6д, 7д, 8д, 9д. Этот сигнал поступает на вход БК 15, который является входом БВСДЦ 14 и управляется БС 30 и с выхода которого сигнал поступает на ЦЛЗ 16 с временем задержки, равным Тп.
В момент времени t = t0 + 5Tп аналогичным образом, описанным выше, формируется код шестого ФМн сигнала, имеющий максимальное расстояние по Хэммингу относительно пятого. Таким кодом будет: 1, -1, -1, -1. На фиг. 2е изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3е изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 + 5Tп устройство начинает работать на прием.
Пусть в момент времени t = t2 + 5Tп ≥ t1 + 5Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогичным образом, как описано выше, что иллюстрируется фиг. 4е, 5е, 6е, 7е, 8е, 9е. Этот сигнал с выхода Σ13 поступает на вход БК 15, который управляется БС 30. С выхода БК 15 сигнал поступает на Σ17, где вычитается с задержанным на Tп пятым сигналом. Затем полученная разность подается на два управляемых БС 30 умножителя Умн 18 и Умн 19, где перемножаются с +1 и -1 соответственно. С выходов этих умножителей результат перемножения поступает в первом канале на ЦЛЗ 20 с временем задержки, равным 8Tп, и на Σ22, а во втором канале поступает на ЦЛЗ 21 с временем задержки 8Tп и на Σ23. Эти разностные сигналы, пройдя через Σ22 и Σ23, поступают на ЦЛЗ 24 и ЦЛЗ 25 с временем задержки 2Tп и в этот же момент времени поступают на БК 26 и БК 27 в первом и втором каналах соответственно. На выход сигналы первого и второго каналов не проходят, т.к. это связано с тем, что БК 26 и БК 27, управляемые БС 30, выключены, поскольку не закончен процесс обработки всей формируемой и принимаемой пачки импульсов и который можно назвать переходным.
В момент времени t = t0 + 6Tп аналогичным образом, описанным выше, формируется код седьмого ФМн сигнала (например, пусть седьмым сигналом будет сигнал, имеющий код: 1, 1, 1, -1). На фиг. 2ж изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3ж изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 + 6Tп устройство начинает работать на прием.
Пусть в момент времени t = t2 + 6Tп ≥ t1 + 6Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогичным образом, как описано выше, что иллюстрируется фиг. 4ж, 5ж, 6ж, 7ж, 8ж, 9ж. Этот сигнал поступает на вход БК 15, который является входом БВСДЦ 14 и управляется БС 30 и с выхода которого сигнал поступает на ЦЛЗ 16 с временем задержки, равным Tп.
В момент времени t = t0 + 7Tп аналогичным образом, описанным выше, формируется код восьмого ФМн сигнала, имеющий максимальное расстояние по Хэммингу относительно седьмого. Таким кодом будет: -1, -1, -1, 1. На фиг. 2з изображен сигнал в виде четырехразрядного кода, поступающий с выхода БЦФФМнС 29, а на фиг. 3з изображены квадратурные составляющие комплексной огибающей этого излучаемого сигнала. В момент времени t = t1 + 7Tп устройство начинает работать на прием.
Пусть в момент времени t = t2 + 7Tп ≥ t1 + 7Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогичным образом, как описано выше, что иллюстрируется фиг. 4з, 5з, 6з, 7з, 8з, 9з. Этот сигнал с выхода Σ13 поступает на вход БК 15, который управляется БС 30. С выхода БК 15 сигнал поступает на Σ17, где вычитается с задержанным на Tп седьмым сигналом. Затем полученная разность подается на два управляемых БС 30 умножителя Умн 18 и Умн 19, где перемножаются с -1 и +1 соответственно. С выходов этих умножителей результат перемножения поступает в первом канале на ЦЛЗ 20 с временем задержки, равным 8Tп, и на Σ22 , а во втором канале поступает на ЦЛЗ 21 с временем задержки 8Tп и на Σ23. Эти разностные сигналы, пройдя через Σ22 и Σ23, поступают на ЦЛЗ 24 и ЦЛЗ 25 с временем задержки 2Tп и в этот же момент времени накопленные разностные сигналы поступают через соответствующим образом включенные БС 30 БК 26 и БК 27 на Умн 28. На выходе Умн 28 появляется отклик, изображенный на фиг. 10 (в принимаемых сигналах есть доплеровское смещение), и на фиг. 11 (нет доплеровского смещения). В дальнейшем БК 26 и БК 27 открываются БС 30 в четные периоды зондирования на длительность периода и закрываются на нечетные.
В момент времени t = t0 + 8Tп аналогичным образом, описанным выше, формируется код девятого ФМн сигнала, который имеет такой же код, как и первый: 1, 1, -1, 1. В момент времени t = t2 + 8Tп устройство начинает работать на прием.
Пусть в момент времени t = t1 + 8Tп ≥ t1 + 8Tп на вход устройства приходит отраженный сигнал. Этот сигнал обрабатывается аналогично первому сигналу, как описано выше.
В момент времени t = t0 + 9Tп аналогичным образом, описанным выше, формируется код десятого ФМн сигнала, который имеет такой же код, как и второй, имеющий максимальное расстояние по Хэммингу относительно девятого. Таким кодом будет: -1, -1, 1, -1. В момент времени t = t1 + 9Tп устройство начинает работать на прием.
Пусть в момент времени t = t2 + 9Tп ≥ t1 + 9Tп на вход устройства приходит отраженный сигнал. Этот сигнал, обрабатывается аналогично второму сигналу, как описано выше. Этот сигнал с выхода Σ13 поступает на вход БК 15, который управляется БС 30. С выхода БК 15 сигнал поступает на Σ17, где вычитается с задержанным на Tп девятым сигналом. Затем полученная разность подается на два управляемых БС 30 умножителя Умн 18 и Умн 19, где перемножаются с +1. Разностные сигналы, которые были записаны в ЦЛЗ 20 и ЦЛЗ 21 8Tп, назад поступают в противофазе на соответствующие входы сумматоров Σ22 и Σ23 и этим самым вычитаются из результирующих сигналов, находящихся в ЦЛЗ 24 и ЦЛЗ 25. С выходов Умн 18 и Умн 19 результаты перемножения поступают в первом канале на ЦЛЗ 20 с временем задержки, равным 8Tп, и на Σ22 , а во втором канале поступают на ЦЛЗ 21 с временем задержки 8Tп и на Σ23, что обеспечит режим работы устройства "скользящее" окно. Эти разностные сигналы, пройдя через Σ22 и Σ23, поступают на ЦЛЗ 24 и ЦЛЗ 25 с временем задержки 2Tп и в этот же момент времени поступают через соответствующим образом включенные БС 30 БК 26 и БК 27 на Умн 28. Далее работа устройства повторяется.
В случае работы с другими кодами (например, восьмиразрядными) значения соответствующих кодов будут повторяться через 16Tп, а СФОФМнМ 29 должен быть согласован с восьмиразрядным кодом. Аналогичным образом требуется изменить характеристики устройства при смене видов кодов.
Вне зависимости от знака доплеровского смещения частоты сигнала, отраженного от движущейся цели, отклики на выходе устройства будут одинаковыми при одинаковых скоростях движения цели, что иллюстрируется на фиг. 12 и 13. Из этих фигур видно, что БЛ сжатых сложных сигналов независимо от величины и знака доплеровского сдвига компенсируются на плоскости (τ,F) за исключением области ±τд относительно точки τ = 0. Все представленные фигуры были получены путем моделирования на ЦВМ описанного алгоритма обработки с соответствующими сигналами.
Проведение технико-экономического сравнения предложенного способа с прототипом показывает, что предложенный способ позволяет выделять сигналы движущихся целей при использовании систем сложных фазоманипулированных сигналов с внутридискретной модуляцией с одновременной компенсацией БЛ в области занимаемых БЛ отдельных сложных сигналов при сохранении высокой разрешающей способности по дальности. Также видно, что по сравнению с прототипом, предлагаемый способ позволяет определить скорость движения цели за счет измерения расстояния между пиками сигнала.



Изобретение предназначено для использования в радиолокационных станциях выделения сигналов движущихся целей на фоне отражений от земной поверхности. Технический результат изобретения заключается в возможности использования системы сложных фазоманипулированных сигналов с внутридискретной частотной модуляцией для выделения сигналов движущихся целей, принимаемых в аддитивной смеси с сигналами, отраженными от подстилающей поверхности, с одновременным подавлением боковых лепестков. Технический результат достигается тем, что формируют, излучают, принимают, сжимают в согласованных фильтрах с соответствующей частотной модуляцией сигналы, образующие сложный фазоманипулированный сигнал, который сжимают в соответствующем согласованном фильтре, и производят вычитание четного сигнала из нечетного, которые имеют максимальное расстояние по Хэммингу, результаты вычитаний системы сигналов накапливают в двух группах и полученные разности синхронно перемножают. 13 ил.
Способ селекции движущихся целей, заключающийся в том, что формируют, излучают, принимают систему фазоманипулированных сигналов с внутридискретной частотной модуляцией, причем каждый дискрет излучаемого фазоманипулированного сигнала размерностью кода N каждого из последовательности фазоманипулированных сигналов, состоящей из 2N сигналов, подвергают внутридискретной частотной модуляции, закон изменения которой определяется знаком кода фазоманипулированного сигнала, законы изменения частоты внутридискретной частотной модуляции ортогональны или квазиортогональны, диапазон изменения этих частот у всех дискретов одинаковый и все сигналы последовательности имеют одинаковую несущую частоту, а при приеме каждый дискрет со своим законом внутридискретной частотной модуляции фазоманипулированного сигнала с размерностью кода N обрабатывают в системе согласованных фильтров, каждый из которых согласован с законом изменения частоты соответствующего фазоманипулированного сигнала, причем последовательность огибающих, знаки которых соответствуют коду соответствующего фазоманипулированного сигнала, подвергают фильтрации в соответствующем согласованном фильтре фазоманипулированного сигнала, отличающийся тем, что излучают последовательно во времени фазоманипулированные сигналы с внутридискретной частотной модуляцией так, что нечетные номера сигналов в этой последовательности имеют максимальное кодовое расстояние по Хэммингу относительно четных следующих за ними сигналов, результаты их обработки в соответствующих согласованных фильтрах вычитают друг из друга, результаты вычитаний накапливают в двух группах, причем накопление осуществляется так, чтобы в одной группе накопленных разностей все первые элементы были положительны, а в другой группе накопленных разностей все последние элементы были положительны, или в одной группе накопленных разностей все первые элементы были отрицательны, а в другой группе накопленных разностей все последние элементы были отрицательны, полученные группы накопленных разностей соответствующим образом задерживают и синхронно суммируют и полученные результаты суммирования в двух группах синхронно перемножают между собой на временном интервале, длительность которого определяется периодом повторения обрабатываемой последовательности.
| СПОСОБ ИМПУЛЬСНОЙ РАДИОЛОКАЦИИ СИСТЕМОЙ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 1996 |
|
RU2107926C1 |
| Литюк В.И., Плекин В.А., Овсеенко А.В | |||
| Системы радиолокационных фазоманипулированных сигналов, Известия ВУЗов СССР, "Радиоэлектротехника", 1991, т.34, N 4,С.37-42 | |||
| US 4292635 A, 29.09.81 | |||
| US 4630051 A, 21.10.86 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ УРОВНЯ ТКАНИ В МАШИНАХ ОТДЕЛОЧНОГО ТЕКСТИЛЬНОГО ПРОИЗВОДСТВА | 0 |
|
SU323662A1 |
| DE 3029518 A1, 18.02.82. | |||
