1
Изобретение относится ,к горнодобывающей промышленности, а .именно к комплеркной механизации добычи полезных ископаемых.
Известно основание секции механизированной крепи, включающее соединенные с конвейером выдвижные балки, гидродомкраты передвижения и шарнирно-рычажную связь.
Однако в известных конструкциях выдвижные балки располагаются между иочвой и опорой лидростоек, связаны с конвейером горизонтальнььм и цилиндрическими шарнирами, в результате чего 1затрудняется лередвижка конвейера и он не используется в качестве доцолнительной опоры.
С целью увеличения опорной поверхности и снижения удельных на.грузак на почв1у пласта в предлагаемом основании мехаии зироваииой крапи выдвижные балки размещены внутри основания, соединенного с шарнир.норычажпой связью посредством подвижных элементов.
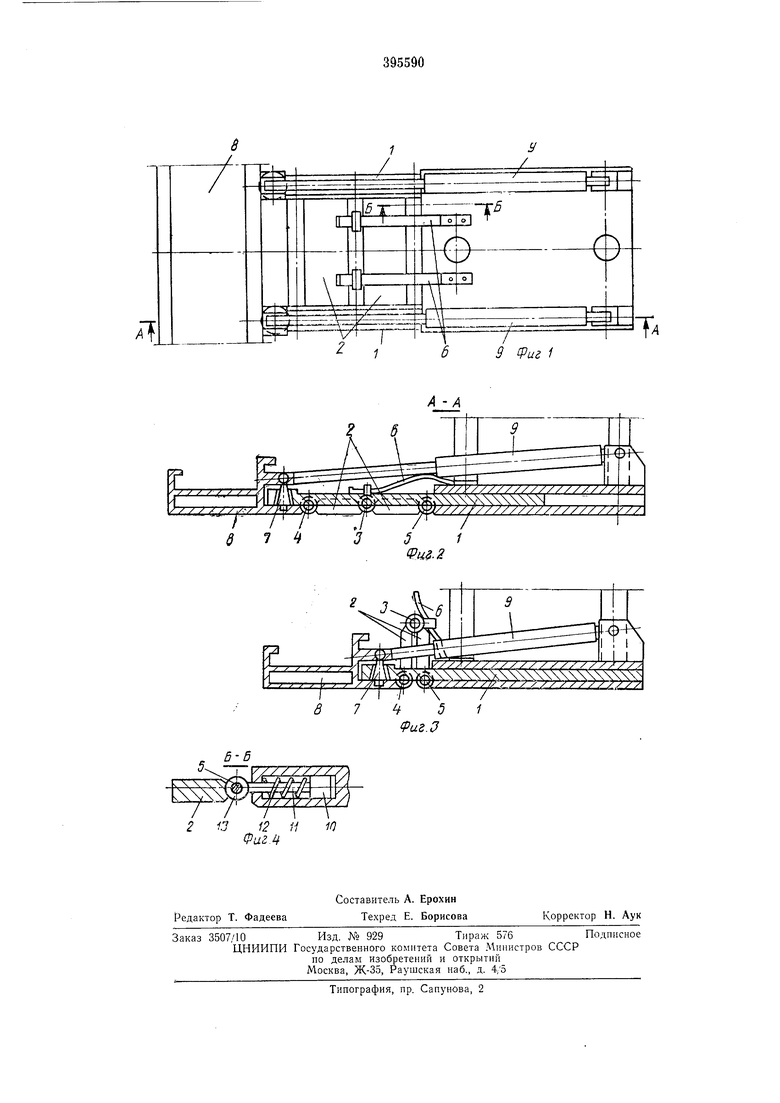
На фиг. 1 изображено .предлагаемое основание В плане (при передвинутом к забою конвейе|ре); на фиг. 2 - разрез по А-А на фиГ. 1; иа фиг. 3 - то же, основание придвпнуто -к конвейеру; на фиг. 4 - разрез по Б--Б на фит. 1.
Основание содержит выдвижные балки /, перемещающиеся В1неред-назад внутри основания, шарнирно-рычажную связь, состоящую
2
из пластин 2, связанных между собой цилпндрически1М шарниром 3 и с (конвейером - цилиндрическим шарниром 4, а с основанием - посредством подвижных элементов (фиг. 4).
Подвижные элементы крепятся к пластине 2 шарнирол 5. Шарнир 3 соединен подвижно (скобой) с пластинчатыми пружина1ми 6. Передние концы выдвижных балок / имеют вертикальные конпческате отверстия, в которых расположены конические тальцы 7, закрепленные на заднем борту конвейера 8. Гидродомкраты 9 служат как для выдвижения секций, так и для (Передвижения конвейера и удержания его в выдвинутом положении. Для обеспечения переменного шага .передвижения конвейера шарнирно-рычажная связь соединена с основандюм подвижпым1и элемоптами, состоянии ми, например, из ползуна 10 со штоком //, па который надета 1пружпна 12. Шток 11 заканчивается цилиидрической проущиной 13, которая соединяется шарниром 5 с пластиной 2.
Устройство работает следуюшим образом.
Если основание ра дположено рядом с конвейерол S, то нагрузка от гидростоек передается иа основапше, на выдвижные балки 1, на конические соединения 7 и на iKOHBeiiep 9.
При передвижении конвейера вместе с ниМ выдвигаются выдваокные балки / и раскрываются пластины 2, поворачиваясь на шарнирах 3, 4 .и 5 и отгибая пружины 6. После передвижения конвейера на .полный шаг пластины 2 ложатся .на освабодиашуюся за конвейером почву. Подвижные элементы включаются в работу только тогда, когда конвейер выдвигается на вели-чину, несколько булышую шага выдвижения секции или копда пластины будут контактировать с выпуклой поверхностью почвы. В этих случаях шарнирно-рычаж«ая связь (пластины 2), перемещаясь за конвейером, вытягивают через шарнир 5 за ШТ01К // шолзуи 10, который сжимает возвратную пружину 12.
При передвинутом к забою конвейере (см. фиг. 2 и 3) передача нагрузки от основания к конвейеру происходит ошять же через выД|вижи1з1е балки 7 и жоничеокие соединения 7. ОдиаКО в этом случае в качестве даполнительной олорной поверхности наряду с конвейерам И1апольз|уются пластины 2, которые остаются вытянутыми в одну плоскость благодаря выдвинутым балкам 1 и запертым в раздвинутом положении гадродомкратами 9. В этом случае основание, выдвижные балки /, коивейер S, запертые 1гидродом1фата1М1И 9, образуют жесткую раму, которая прижата к почве и работает как единое целое.
П р е д М е т изобретения
Основание секщи.и механизм ров крепи, включающее соединенные с 1;онвейером выдвижные балки, Гидродом краты передвижения и шарнирно-рычажную связь, отличающееся тем, что, с целью увеличения опорной поверхности и снижения удельных нагрузок на почву иласта, выдвиЖные балки размещены внутри основания, соединенного с щариирно-рычажной связью посредством лодвижных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДВИЖЕНИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ ДЛЯ ФРОНТАЛЬНЫХ И СТРУГОВЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ И АГРЕГАТОВ И МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021524C1 |
| ОСНОВАНИЕ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1994 |
|
RU2069760C1 |
| Концевая группа механизированной крепи | 1990 |
|
SU1816866A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ РАЗРАБОТКИ МОЩНЫХ КРУТОПАДАЮЩИХ МЕСТОРОЖДЕНИЙ | 2003 |
|
RU2253018C2 |
| СЕКЦИЯ КРЕПИ ОЧИСТНОГО МЕХАНИЗИРОВАННОГО КОМПЛЕКСА | 1991 |
|
RU2027012C1 |
| СЕКЦИЯ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1992 |
|
RU2065059C1 |
| Секция механизированной крепи | 1987 |
|
SU1509541A1 |
| СПОСОБ КРЕПЛЕНИЯ И УПРАВЛЕНИЯ КРОВЛЕЙ В ОЧИСТНОМ ЗАБОЕ, КРЕПЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА, МЕХАНИЗМ ТЕЛЕСКОПИЧЕСКОЙ ЗАТЯЖКИ ЗАЗОРОВ ПО КРОВЛЕ И ЗАВАЛУ, СОЕДИНЕНИЕ ОСНОВАНИЙ СЕКЦИЙ, НАПРАВЛЯЮЩАЯ БАЛКА КРЕПИ, МЕХАНИЗМ РАСПОРА СЕКЦИЙ КРЕПИ, МЕХАНИЗМ СКЛАДЫВАНИЯ КРЕПИ, КОЗЫРЕК ПЕРЕКРЫТИЯ КРЕПИ | 2001 |
|
RU2200843C2 |
| СТРУГОВЫЙ КОМПЛЕКС | 1992 |
|
RU2067178C1 |
| Механизированная крепь | 1982 |
|
SU1073475A2 |