1
Изобретение может быть использова.но в уборочных аппаратах вертикально-шпиндельных хлолкоуборочных машин.
Известен механиз.м обратного вращения шпинделей, содержаш,ий бесконечный ремень, поджимаемый « роликам шпинделей кар-касом.
Тор можение ремней в известном .механизме осуществляется за счет трения их тыльной поверхности по обратнику (криволинейному рычагу), шарнирно связанному с корпусо-м колодки и поджимающему ремни.
В известном механиз.ме движение бесконечных ремлей происходит с неравномерной скоростью, И|Мпульсивно, TaiK как при шарнирно связанном с корпусом колодки жестком обратнике ремни движутся за счет периодического срыва сил сцепления ремней с обратником.
Из-за инерционных сил массы обратника после срыва сил .сцепления он падает .в режим затухающпх автоколебаний. В этом случае ремни длительное время перемещаются с большей скоростью. При этом кинематические режимы работы шпинделей нарушаются, а также значительно снижается тяговая способность привода.
Целью изобретения является стабилизация движения ремней.
Для этого механизм обратного вращения шпинделей снабжен клиновым элементом, свободно установленным между ремнем и каркасом.
Кроме того, поверхность клпнового элемента со стороны ремня снабжена накладкой, имеющей пониженный коэффициент трения по сравнению с материалом клина.
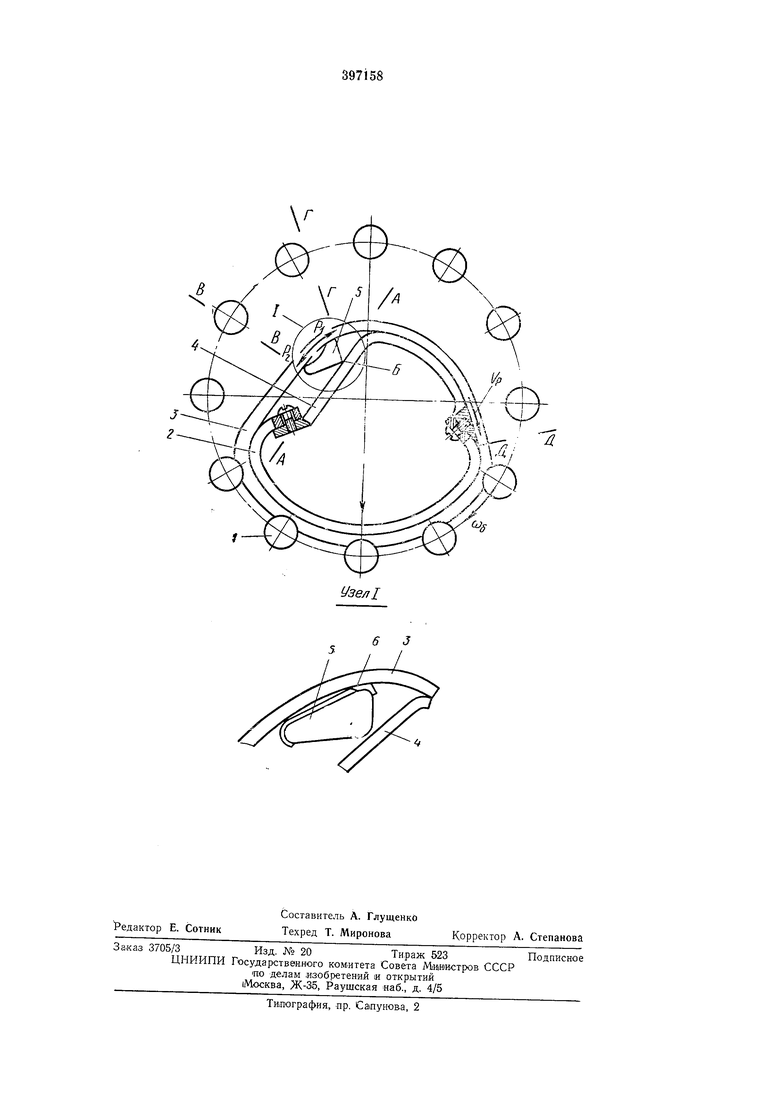
На чертеже изображен предлагаемый мехапизм и узел I.
Механизм содержнт ролики шпинделей 1, вращающиеся со шпиндельным барабаном в направлении его угловой скорости соб, корпус 2 колодки, бесконечные ремни 3, опорный
кронштейн 4 и клиновой элемент 5 из упругото фрикционного материала.
Опорный кронштейн 4 жестко соединен с корпусом 2 колодки, упругий 1КЛИНОВОЙ элемент 5 связан с тыльной поверхностью ремней 3 И опорной поверхностью АА кронштейна 4 силами трения.
При работе (Механизма силы динамических (реверсирования) и технологических сопротивлений вращению шпинделей стремятся переместить ремни 3 по направлению скорости Ур.
Движение ремней обеспечивается за счет превыщен1ня движущих сил над силами сопротивления от трения ремней по поверхностям iKOpnyca колодки, опорного кронштейна
и клинового элемента. Роль регулятора сил сопротивления п-ри иэменеиии движущих сил осуществляет клиновой эле|Мент, обладающий линейной и угловой податливостью под действием сил Pi и Р2 (фиг. 1) натяжения ремней в плоскостях ВВ :и ГГ.
Силы трения |между тыльными поверхностями ремней 3 и поверхностью «линового элемента 5 перемещают клиновой элемент по опорной ловерхности АА «ронщтейна 4, обеспечивая автоматически подтяжку ремней и создава я тем самым да1вление тыльных поверхностей ремней на корпус колодки 2 -и участок опорного Кронщтейна между поверхностью АА и плоскостью ДД.
Линейная податливость в направлении, перпендикулярном поверхности АА, обеспечивает гащение динамических нагрузок, действуюЩИ:Х на ремни от роликов шпинделей.
Угловая податливость, относительно точкя Б, обеспечивает дополнительное увеличение сил сопротивлений при плавном иаменении нагрузок, действующих на ремни.
С целью устранения полной остановки ремней из-за заклинивания детали 5 между поверхностью АА и ремня1ми, поверхность клинового эле1мента со стороны ромней может быть снабжена накладкой 6, коэффициент трения которой по поверхности ремней ниже коэффициента трения основного материала клина.
Движение ремней в предлагаемом механизме осуществляется стабильно, остановок рамней и срывов сил сцепления, ускоряющих движение ремней, не происходит. Скорость
перемещения ремней составила 80-100 мм/час, обеспечивая необходимые .кинематические режимы работы щпинделя.
За 200 час работы износа практически не было, по предварительным и заключительнььм замерам величина его находилась в пределах погрещности произведенных замеров.
Наряду с этиМ серийные ремни привода обратного вращения щпинделей до полного износа имеют средний срок службы 150- 170 час.
Предлагаемый механизм дает возможность обеспечить высокую тяговую способность привода в сравнении с известным механизмом и резко повысить долговечность работы ремней сравнительно с используемыми серийными конструкциями.
Пред.мет изобретения
1.Механизм обратного вращения щпинделей хлоп.коуборочнОГо аппарата, содержащий бесконечный ремень, поджимаемый к роликам щпинделей каркасом, отличающийся тем, что, с целью стабилизации движения ремней, он снабжен клиновым элементом, свободно установ.ленным между .рем.не.м и 1каркасом.
2.Механизм по п. 1, отличающийся тем, что поверхность клинового элемента со стороны ремня снабжена .накладкой, имеющей пониженный коэффициент трения по сравнению с материалом клина.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод шпинделей вертикально-шпиндельного хлопкоуборочного барабана | 1990 |
|
SU1794383A1 |
| Механизм обратного вращения шпинделей хлопкоуборочного аппарата | 1978 |
|
SU791309A1 |
| Механизм обратного вращения шпинделей хлопкоуборочной машины | 1976 |
|
SU586866A1 |
| ПРИВОД ШПИНДЕЛЕЙ ХЛОПКОУБОРОЧНОГО АППАРАТА | 1972 |
|
SU351496A1 |
| КОЛОДКА ОБРАТНОГО ВРАЩЕНИЯ ШПИНДЕЛЕЙ ВЕРТИКАЛЬНО-ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГОАППАРАТА | 1971 |
|
SU291680A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1985 |
|
SU1349713A2 |
| Механизм привода обратного вращения шпинделей вертикального барабана хлопкоуборочного аппарата | 1988 |
|
SU1648276A1 |
| Механизм привода шпинделей хлопкоуборочного барабана | 1981 |
|
SU1025359A1 |
| Колодка обратного вращения шпинделей хлопкоуборочного аппарата | 1977 |
|
SU641910A1 |
| Стенд для испытания хлопкоуборочного барабана | 1987 |
|
SU1587371A1 |
6 J
