1
Изобретение относится к механизации транспортировочнЫХ и перегрузочных операций и предназначено для подъема штучных грузов с одновременным их накоплением.
Известны накопители-подъемники, содержащие расположенное по опирали грузонесущее полотно, опирающееся на щтанги, перемещаемые по направляющим и соединенные с тяговой цепью.
Однако нрименяемые в таких нэкопителяхподъемниках устройства для закрепления грузонесущего полотна, а также конструкция последнего не обеспечивают надежности его работы, в частности условия постоянного и одинакового натяжения полотна, что может явиться причиной несохранности транспортируемого груза.
Целью изобретения является придание грузонесущему полотну желобчатой формы с сохранением ее при переходе полотна с прямолинейных участков трассы на криволинейные и наоборот.
Для этого к штанге предлагаемого накопителя прикреплены опорные поверхности желобчатой формы и пружины, один конец каждой из которых соединен с гибким элементом, огибающим блоки, установленные на щтанге, и закрепленным на соседней щтанге, причем штанги одним концом прикреплены к тяговой :цеци, а на другом конце снабжены ходовыми роликами, установленными в направляющих.
С целью уменьшения длины грузонесущего полотна обратную его вегвь .целесообразно
располагать внутри спнрали, а для обеснечения стыковки накопителя с различными автоматизированными поточными линиями, загрузочные участки грузопесущего полотна могут быть расположены горизонтально.
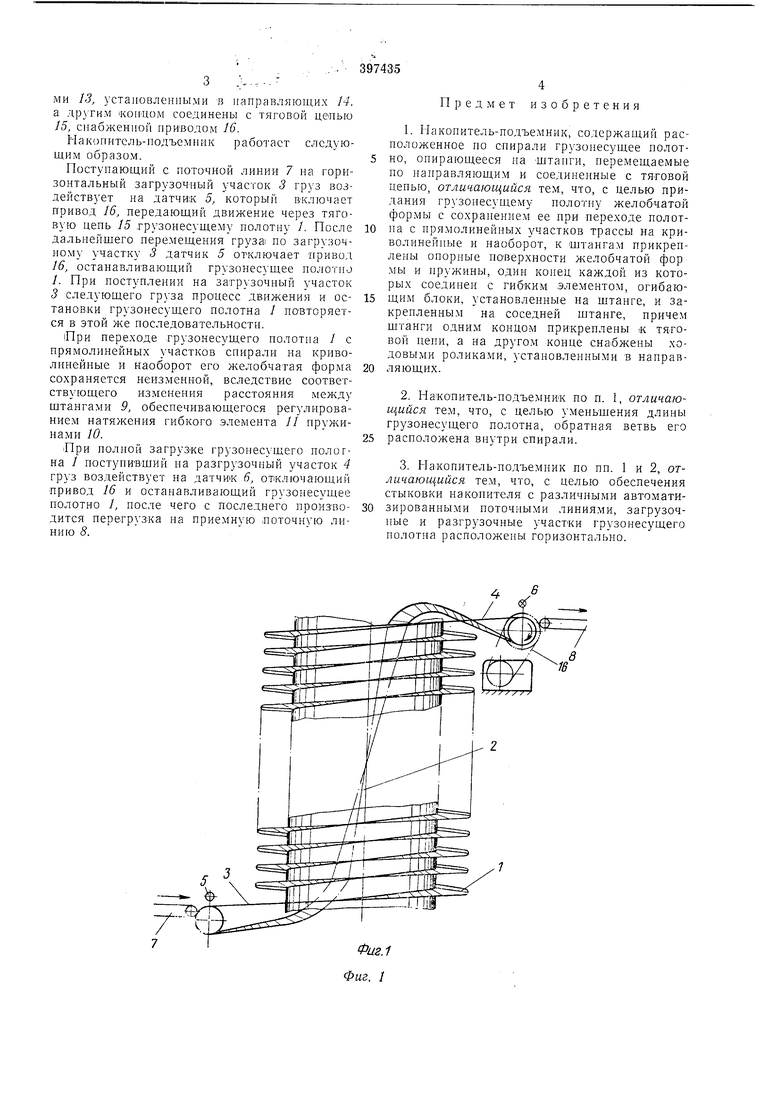
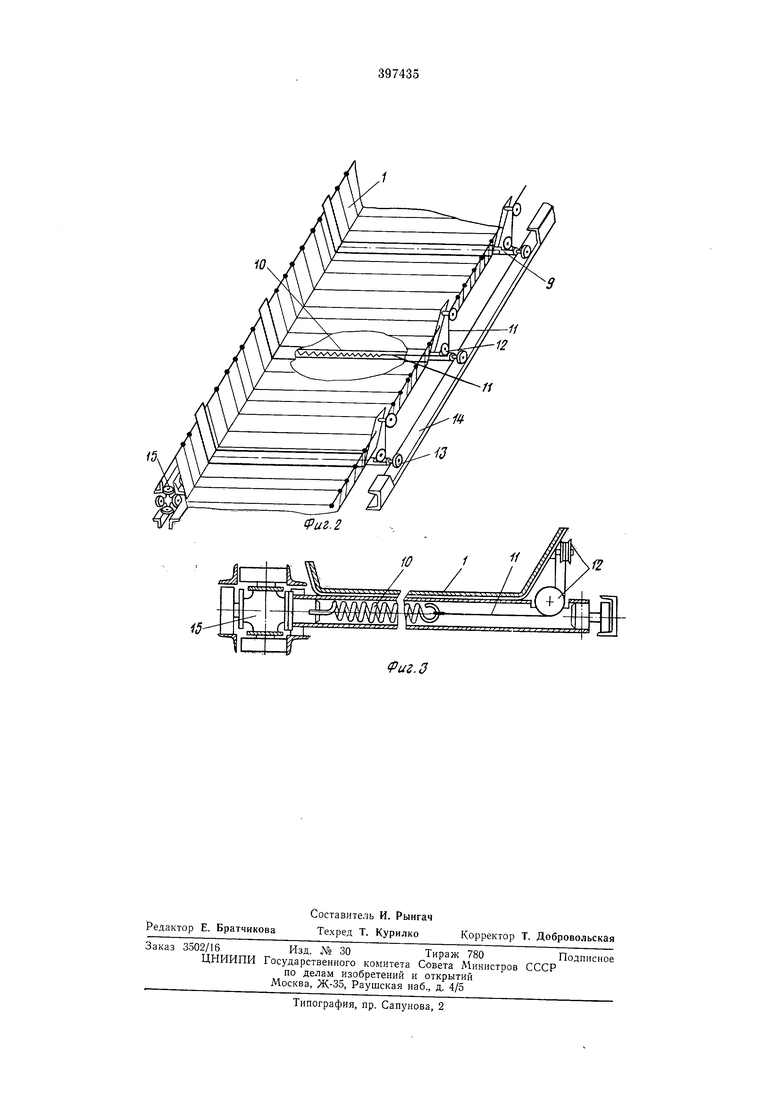
На фиг. 1 изображен общий вид предлагаемого накопителя-подъемника; на фнг. 2 - закрепление грузонесущего нолотна; на фиг. 3 - соединение гр)зопесущего полотна со щтангой, в разрезе.
Грузонесущее полотно 1 желобчатой формы выполнено в виде спирали с проходящей внутри нее обратной ветвью 2 и горизонтально расположенными загрузочным и разгрузочным участками 3 и 4, снабженными соответственно датчикамн 5 и 6 и предназначенными для стыковки с подающей н приемной автоматизированными поточными линиями 7 и 8.
Грузонесущее полотно / опорной поверхностью закреплено к штанге 9, снабженным нружинами 10, один конец каждой из которых соединен с гибким элементом //, огибающим установленные на щтанге 9 блоки 12 и закрепленным на соседней штаге. Штанги на
одном конце оборудовапы ходовыми роликами 13, ycTaiiOEijieniibiMH в направляющих 14, а другим конЦом соединены с тяговой цепью /5, снабженной приводом 16.
Накопитель-подъемник работает следующим образом.
Поступающий с поточной линии 7 на горизонтальный загрузочный участок 3 груз воздействует на датчик 5, который включает привод 16, передающий движение через тяговую цепь 15 грузонесущему полотну /. После дальнейшего перемещения груза; по загрузочному участку 3 датчик 5 отключает привод 16, останавливающий грузонесущее полотно /. Прн поступлении на загрузочный участок 3 следующего груза процесс движения и остановки грузонесущего полотна / повторяется в этой же последовательности.
При переходе грузонесущего полотпа / с прямолинейных участков спирали на криволинейные и наоборот его желобчатая форма сохраняется неизменной, вследствие соответствующего изменения расстояния между щтангами 9, обеспечивающегося регулированием натяжения гибкого элемента 11 пружинами 10.
При полной загрузке грузонесущего пологна / поступивший на разгрузочный участок 4 груз воздействует на датчик 6, отключающий привод 16 и останавливающий грузонесущее полотно /, после чего с последнего производится перегрузка на приемную поточную линию 8.
Предмет изобретения
1.Пакопитель-подъемник, содержащий расположенное но спирали грузопесущее полотно, опирающееся на штанги, перемещаемые по направляющим и соединенные с тя-говой цепью, отличающийся тем, что, с целью придания грузонесущему полотну желобчатой формы с сохранением ее при переходе полотна е прямолинейных участков трассы на криволинейные и наоборот, к штангам прикреплены опорные поверхности желобчатой фор мы и пружины, один конец каждой из которых соединен е гибким элементом, огибающим блоки, установленные на штацге, и закренленным на соседней щтанге, причем щтанги одним концом прикреплены к тяговой цепи, а на другом конце енабжены ходовыми роликами, установленными в нанравляющих.
2.Накопитель-подъемник цо п. 1, отличающийся тем, что, с целью уменьшения длины грузонесущего полотна, обратная ветвь его
расположена внутри спирали.
3.Накопитель-подъемник по пп. 1 и 2, отличающийся тем, что, с целью обеспечения стыковки накопителя е различными автоматизированными поточными линиями, загрузочные и разгрузочные участки грузонесущего полотна расположены горизонтально.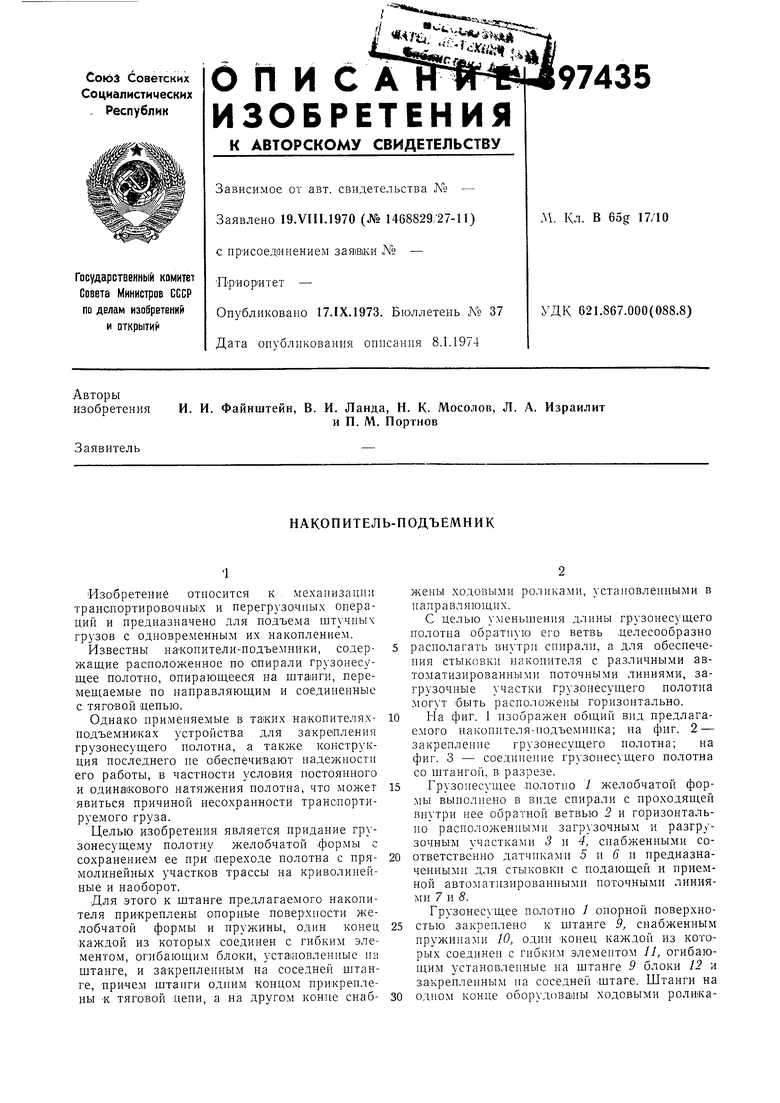
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203207C2 |
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ | 2001 |
|
RU2216497C2 |
| СПОСОБ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2235051C2 |
| Крутонаклонный ленточный конвейер | 1985 |
|
SU1305066A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЫПУЧИХ ГРУЗОВ | 2001 |
|
RU2235052C2 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Крутонаклонный ленточный конвейер | 1989 |
|
SU1726324A1 |
| Люлечный элеватор | 1986 |
|
SU1406082A1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2010 |
|
RU2455216C2 |
| Накопитель штучных грузов для поточных линий | 1977 |
|
SU719933A1 |
Фиг.З
