1
п
О Од
00 ND
Шиг.1
шой оси Э. У начала вертикального восходящего участка установлен за- грузочньй рольганг 7, в конце нисходящей ветви вертикального участка - разгрузонный рольганг 12. Вблизи последнего установлен вьщвижной У 13,
При разгрузке при подходе Л 5 с гру- зой У 13 взаимодействуют с У11 и поворачивают Л 5 в сторону авдьганга 12. Груз 6 перемещается по последне- му, освобождая место для следующего груза 6. 1 з.п ф-лы, 5 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортировки и загрузки штучных грузов | 1988 |
|
SU1518242A1 |
| Устройство для загрузки и разгрузки люлечного элеватора штучными грузами | 1980 |
|
SU929515A1 |
| ЛЮЛЕЧНЫЙ ВЫСТУПОДВУЛЕНТОЧНЫЙ ЭЛЕВАТОР | 1993 |
|
RU2079424C1 |
| Люлечный элеватор | 1978 |
|
SU753724A1 |
| Люлечный элеватор | 1990 |
|
SU1722982A1 |
| ЛЮЛЕЧНЫЙ ВЫСТУПООДНОЛЕНТОЧНЫЙ ЭЛЕВАТОР | 1994 |
|
RU2079425C1 |
| Люлечный элеватор | 1977 |
|
SU621619A1 |
| Устройство для перемещения и автоматической перегрузки штучных грузов | 1987 |
|
SU1481154A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Элеватор для штучных грузов | 1960 |
|
SU138172A1 |

Изобретение относится к пром. транспорту. Цель изобретения - повышение коэф-та использования объема элеватора и повышение надежности. На раме 4 установлены концевые звездочки, огибаемые тяговыми цепями. К последним шарнирно подвешены, гру- зонесупдае люльки (Л) 5 с загрузочным упором (У) 10 и разгрузочным У 11 для транспортировки грузов 6 цилиндрической формы. Направляющие для цепей имеют прямолинейный 1 и 5сривЬлинейный 3 участки. Последнй имеет форму горизонтально расположенной половины эллипса (Э) с параметрами, определяемыми по уравнению xVRVVR()1, где X - половина большой оси Э; у - половина малой оси Э; R - половина расстояния между восходящей и нисходящей ветвями Э. Шаг цепей равен шагу крепления Л 5 и большой оси Э. Расстояние от оси крепления каждой Л 5 до крайней точки ее торца равна половине боль- i (Л
1
Изобретение относится к промьшшен- ному транспорту, а именно к люлеч- ным .элеваторам.
Цель изобретения - повышение коэффициента использования объема элева тора и повьшение надежности.
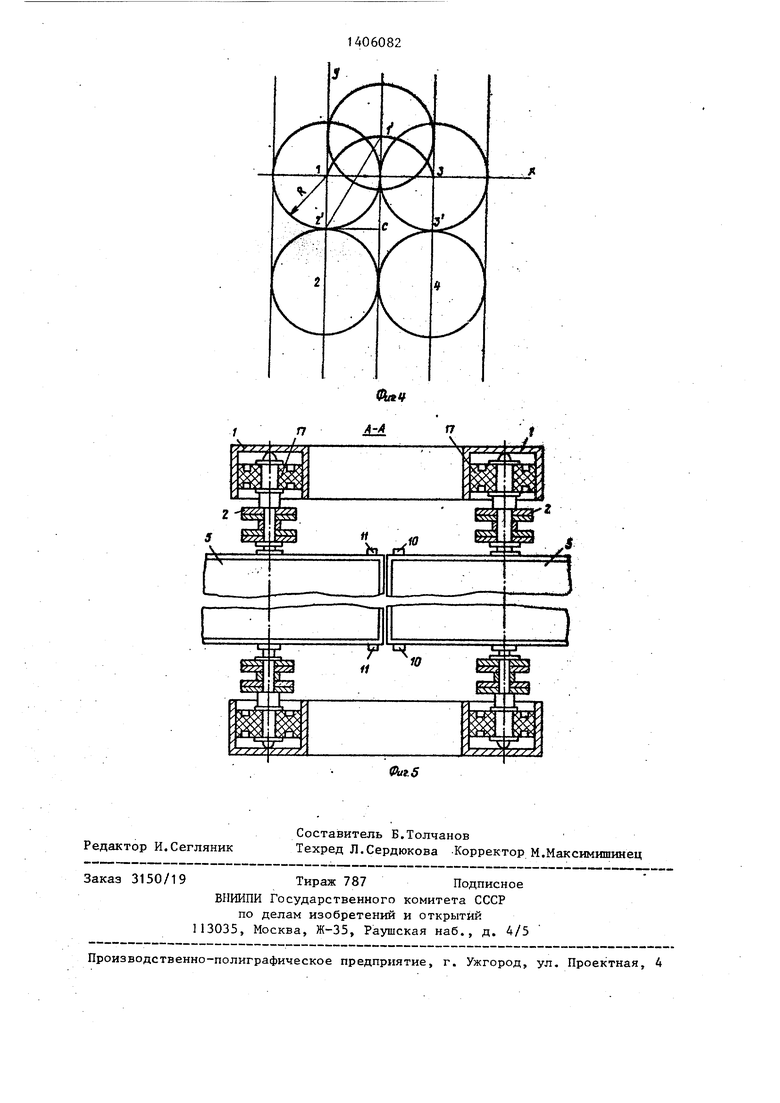
На фиг. 1 изображен люлечный элеватор, общий вид; на фиг. 2 - элеваторный стеллаж, вид сверху; на фиг.З- траектория движения на криволинейном участке элеватора; на фиг. 4 - схема движения грузонесущих люлек на криво- линейном, участке; на фиг. 5 - разрез А-А на фиг, 1.
Люлечный элеватор состоит из прямолинейных участков 1 направляющих, установленных вдоль вертикальных участков трассы тяговых цепей 2, и криволинейных участков 3 направляющих, установленных на обводных участ ках. Концевые звездочки, огибаемые тяговьми цепями закреплены на раме 4
К тяговым цепям 2 шарнирно прикреплены грузонесущие люльки 5 для транспортирования грузов 6 цилиндрической формы (рулонов).
Загрузочный рольганг 7 установлен у начала вертикального- восходящего участка и имеет наклон в сторону элеватора. На конце загрузочного рольганга 7 установлены поворотная заслонка 8 и концевой вьжлючатель 9. На грузонесущих люльках 5 жестко закреплены загрузочные упоры 10 и разгрузочные упоры 11. Разгрузочный рольганг 12 установлен в конце нисходящей ветви вертикального участка. Вблизи разгрузочного рольганГа 12 раположен вьщвижной упор 13 с приводом 14. Два гусеничных привода 1-5 тяговых цепей 2 размещены на их вертикальном участке снаружи элеватора и соединены с электродвигателем 16.
Пульт управления 17 элеватора связан с концевым выключателем 9, приводом 14 выдвижного упора 13 и электродвигателем 16. Тяговые цепи 2 ориентированы относительно направляющих посредством роликов 17, вьтолнены в виде горизонтально расположенной половины эллипса, с параметрами, определяемыми по уравнению
х Х
R 43-lf
1,
5
5
0
5
0
где X - половина большой оси эллипса; у - половина малой оси эллипса; R - половина расстояния между
восходящей и нисходящей ветвями элеватора.
При практической реализации конструкции люлечного элеватора шаг между грузонесущими люльками 5 выбирается с учетом минимального технологического зазора, обеспечивающего невозможность касания соседних грузонесущих люлек 5. При этом, riar тяговых цепей равен шагу крепления грузонесущих люлек 5, а расстояние от оси крепления каждой грузонесущей люльки 5 до крайней точки ее торца равно половине большой оси эллипса.
Расстояние между восходящей и нисходящей 96ТВЯМИ элеватора, равное большой оси эллипса, может быть увеличено на величину минимального технологического зазора для того, .чтобы транспортируемые до.восходящей и нисходящей ветвей грузонесущие люльки 5 с грузами 6 не соприкасались друг с другом.
Элеватор при непрерьшной загрузке работает следующим образом.
Груз 6 цилиндрической формы подается на загрузочньй рольганг 7 и
останавливается в позиции загрузки у поворотной заслонки 8, воздействуя на концевой выключатель 9, который подает сигнал на пульт управления 1 7, вкпючаюп ий электродвигатель 1 6 гусеничных приводов 15 тяговых цепей 2, Двигаясь по трассе -элеватора вместе с грузонесущими люльками 5, загрузочные упоры 10 поворачивают заслонку 8 и груз 6 попадает в грузонесущую люльку 5. После перегрузки груза 6 концевой выключатель 9 подает сигнал на пульт управления 17, а поворотная заслонка 8 возвращается в исходное положение. Реле пульта управления 17 производит выключение электродвигателя 16 приводов 15 элеватора после подъема загруженной грузонесущей люльки 5 с участка за- грузки до подхода очередной пустой грузонесущей люльки 5.
Элеватор при непрерывной разгрузке работает следующем образом.
С пульта управления 17 подается сигнал на включение электродвид ате- ля 16 приводов 15 тяговых цепей 2 и на приводы 14, вьщвигающие разгрузочные упоры 13. При подходе грузонесущей люльки 5 с грузом 6 выдвижные упоры 13 взаимодействуют с разгрузочными упорами 11 и поворачивают грузонесущую люльку 5 в сторону разгрузочного рольганга 12, обеспечивая перегрузку груза 6 из грузонесущей люльки 5 на разгрузочный рольганг 12 Снятый груз 6 перемещается по наклонному разгрузочному рольгангу 12, освобождая место для следующего (рулона) груза 6. После полной разгруз- ки элеватора с пульта управления 17 подается сигнал на включение приво
да 15 элеватора и приводов 14 вьщ- вижных упоров 13.
Для обеспечения возможности нормального прохождения грузонесущих
2
люлек 5,шарнирно закрепленный на Гяго- вых цепях 2 через обводные участки при удовлетворении требования максимального использования объема элеватор с точки подвески грузонесу- щих люлек 5 двигается на обводных участках по полуэллипсу, параметры которого определены приведенным уравнением.
Формула изобретения
-2
7 Х
R
где X - половина- большой оси эллипса; у - половина малой оси эллипса; R - половина расстояния междз восходящей и нисходящей вет вями элеватора;
при этом шаг тяговых цепей равен ща- гу крепления грузонесущих люлек и большой оси эллипса.
25 30 35 40
п
X
(Риг.2
у.
Фиг.5
П
Т
11
10
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Элеватор | 1979 |
|
SU775003A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
