и.
:J
о/°/ / / // ///у /-/ /V-/ /9 / / / / / /
(Риг,1
Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания животных.
Цель изобретения - повышение точности путем уменьшения влияния ошибок, обусловленных нестабильностью показаний силоизмерителя.
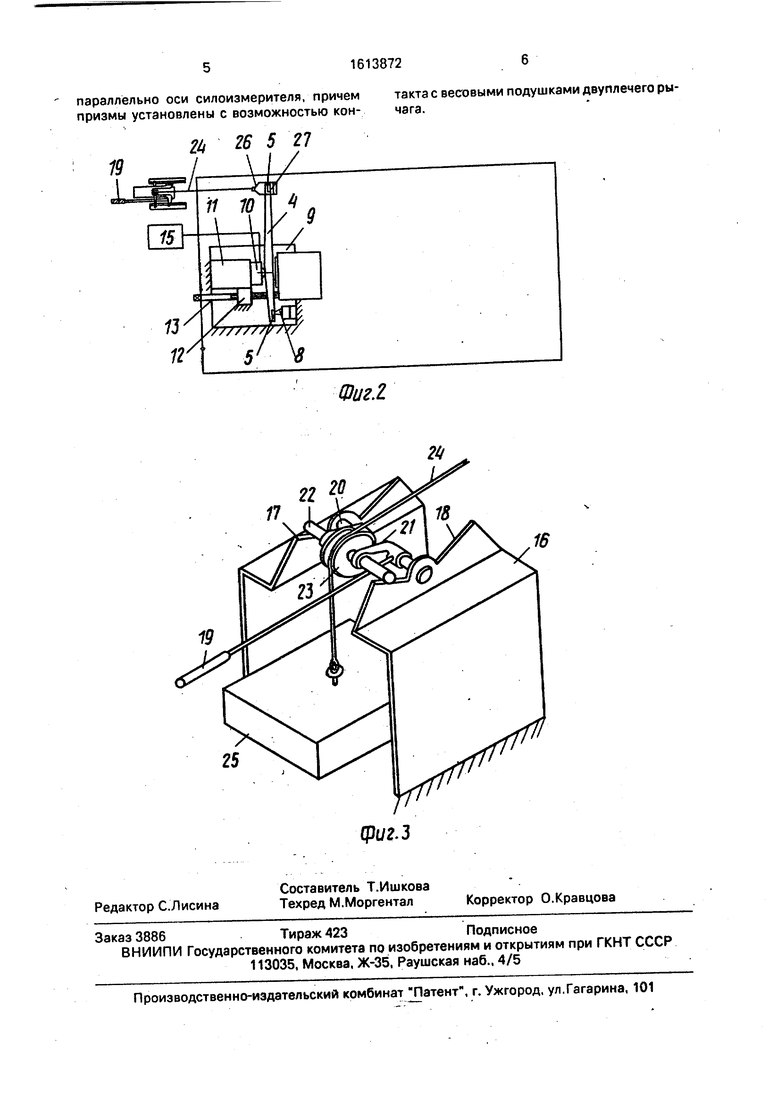
На фиг. 1 схематически изображено предлагаемое устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - узел контроля.
Устройство для взвешивания животных состоит из грузоприемной платформы 1. опирающейся на ножевые упоры 2, расположенные под углами платформы, кронштейна платформы 3, двуплечего рычага 4 с весовыми подушками 5 на концах, подвешенного на гибких связях 6 (например, цепи) к нижней поверхности платформы, упора 7 с призмой 8, закрепленного на основании 9, силоизмерителя 10. закрепленного на кронштейне 11. механизма отключения грузоприемной платформы 1 от силоизмерителя 10. состоящего из гайки 12. скрепленной жестко с основанием 9 и винта 13. узла 14 контроля и блока 15 обработки информации.
Узел 14 контроля (фиг. 3) выполн ен из двух боковин 16, имеющих левые 17 и правые 18 вырезы и закрепленных на основании 9, рукоятки 19, жестко закрепленной на валу 20 вместе с щечками 21. к которым жестко прикреплена ось 22 блока 23 грузового троса 24. Один конец грузового троса 24 соединен с эталонным грузом 25, а другой - с серьгой 26, на которой расположена вторая призма 27, контактирующая с весовой подушкой 5 двуплечего рычага 4.
Устройство для взвешивания животных работает следующим образом.
После наладки и тарировки устройства определяют величину электрического сигнала силоизмерителя 10 при пустой грузоприемной платформе 1. Для этого отводят винт 13 механизма отключения грузоприемной платформы, вращая его в гайке 12 про- ти в часовой стрелки, от кронштейна платформы 3. При этом грузоприемная платформа 1 поворачивается на ножевых упорах 2 и двуплечий рычаг 4, который подвешен на гибких связях 6 к грузоприемной платформе 1, входит в контакт с кронштейном платформы 3 (их поверхности взаимо- параллельны) и нагрузка пустой грузоприемной платформы 1 передается на силоизмеритель 10. жестко закрепленный на кронштейне 11. Блок 15 обработки информации фиксирует сигнал силоизмерителя 10.
В этом положении рукоятка 19 узла И контроля установлена в крайнее правое положение, ось 22 блока 23 лежит на правых вырезах 18 боковин 16, а эталонный груз 5 25 - на основании.
Отключение грузоприемной платформы 1 происходит в обратном порядке. Как только кронштейн платформы 3 отходит от двуплечего рычага 4. весовые пары (подушки 5 10 и призмы 8 и 27) находятся во взаимодействии. Затем производится загрузка силоиз мёрителя 10 эталонным грузом 25 (фиг. 3), для чего поворачивается рукоятка 19 узла Ц контроля вместе со щечками 21 против ча- 15 совой стрелки вокруг вала 20. При этом ось 22 блока 23 опирается на левые вырезы 17 боковин 16. эталонный груз 25 вследствие увеличения расстояния от оси блока до двуплечего рычага 4 поднимается над основ - 20 нием 9, а грузовой, трос 24 натягивается и передает усилие на силоизмеритель 10 чв
рез серьгу 26 с призмой 27, двуплечий рычаг 4 с весовыми подушками 5 и упор 7 с приз- мой 8. Сигнал силоизмерителя 10 фиксирует
25 блок 15 обработки информации.
При различии сигналов силоизмерителя от эталонного груза 25 и от пустой грузоприемной платформы 1 производится корректировка эталонного груза до тех пор, пока
30 сигналы не становятся идентичными. После этого на грузоприемную платформу 1 загоняют животных, где они содержатся весь период откорма, а информация о массе поступает в блок 15 обработки информации
35 ежедневно. При необходимости поверки силоизмерителя указанным способом отключается грузоприемная платформа 1 от силоизмерителя 10 и последний нагружается эталонным грузом через двуплечий ры40 чаг 4.
Формула и зобретени я Устройство для взвешивания животных, содержащее грузоприемную платформу, связанную через передаточный механизм с
5 силоизмерителем, закрепленным на основании, узел контроля и блок обработки информации, отличающееся тем. что. с целью повышения точности за счет уменьшения влияния ошибок, обусловленных не0 стабильностью показаний силоизмерителя. в него введен упор с первой призмой, скрепленный с основанием, при этом передаточный механизм выполнен в виде двуплечего рычага, подвешенного к грузоприемной
5 платформе через гибкие связи, с обеих сторон которого расположены весовые подушки, а узел контроля выполнен с грузовым тросом, на конце которого закреплена серьга с второй призмой, расположенным перпендикулярно двуплечему рычагу и
параллельно оси силоизмерителя. причем такта с весовыми подушками двуплечего ры- призмы установлены с возможностью кон- чага.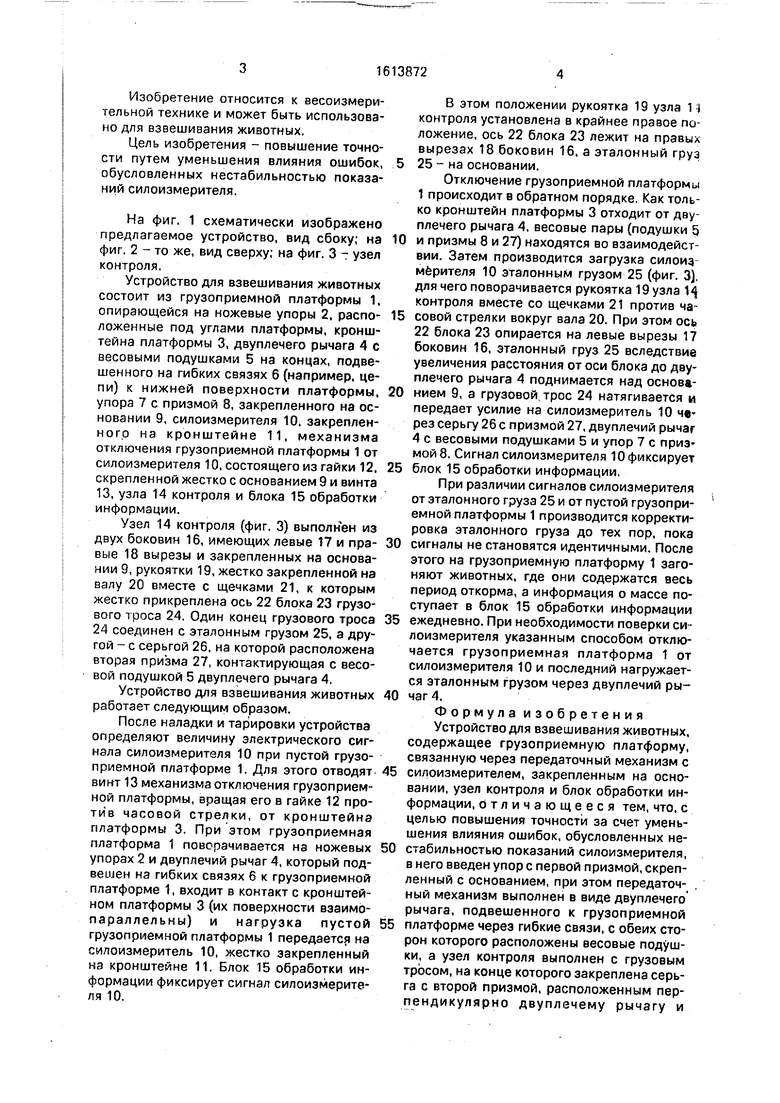
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1973 |
|
SU398834A1 |
| ПЛАТФОРМЕННЫЕ ВЕСЫ | 1971 |
|
SU435460A1 |
| Весы для взвешивания животных | 1989 |
|
SU1765714A1 |
| Устройство для взвешивания длинномерных грузов | 1981 |
|
SU1328683A1 |
| Весоизмерительное устройство | 1990 |
|
SU1755057A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| Платформенные рычажные весы | 1984 |
|
SU1339634A1 |
| Весы с устройством поверки | 1981 |
|
SU1291826A1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
| УСТРОЙСТВО для ВЗВЕШИВАНИЯ НА ДВУХПЛАТФОРМЕННЫХ ВЕСАХ | 1971 |
|
SU310124A1 |
Изобретение относится к весоизмерительной технике и может быть использовано для взвешивания животных. Цель изобретения - повышение точности за счет уменьшения ошибок, обусловленных нестабильностью показаний силоизмерителя. После тарировки и наладки устройства определяют величину электрического сигнала силоизмерителя при пустой грузоприемной платформе 1. Для этого отводят винт 13 механизма отключения грузоприемной платформы от кронштейна платформы 3, при этом грузоприемная платформа 1 поворачивается на ножевых упорах 2 и двуплечий рычаг, подвешенный на гибких связях 6, входит в контакт с кронштейном платформы 3. При этом нагрузка пустой грузоприемной платформы 1 передается на силоизмеритель. В этом положении рукоятка 19 узла 14 контроля установлена в крайне правое положение, а эталонный груз - на основании. При отключении грузоприемной платформы 1 производится загрузка силоизмерителя эталонным грузом. Для этого рукоятка 19 поворачивается вокруг вала против часовой стрелки, и вес эталлонного груза через тросс, серьгу, призму, двуплечий рычаг с весовыми подушками передается на силоизмеритель. При различии сигналов от эталлонного груза и пустой грузоприемной платформы 1 на силоизмерителе производится корректировка эталлонного груза до тех пор, пока сигналы не станут идентичными. Затем на грузоприемную платформу 1 загоняют животных, информация о их массе поступает в блок обработки информации. 3 ил.
2 26 5 27
Фиг2
17
22
20
25
| Авторское свидетельство СССР , № 619803, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
