1
Изобретение относится к области весоизмерительной техники и может найти применение в электрических стационарных платформенных весах, предназначенных для взвешивания как неподвижных, так и движущих грузов (например, в автомобильных, вагонных, авиационных и пр.).
Известны автоматические весы для взвешивания движущихся объектов, содержащие грузоприемную платформу, установленную на чувствительные элементы, и устройство нагружения весов эталонным грузом, подвешенным под платформой. Привод устройства нагружения выполнен в виде рычага, взаимодействующего с электромагнитом, установленным на фундаменте. Известные весы из-за возникновения возмущающих сил при перемещении рычага не обеспечивают высокой точности тарирования.
Предложенные весы отличаются тем, что привод перемещения рычага установлен на раме платформы и снабжен подвижным по вер;икали захватом, взаимодействующим с грузоприемной призмой рычага.
На чертеже изображены предлолсенные весы.
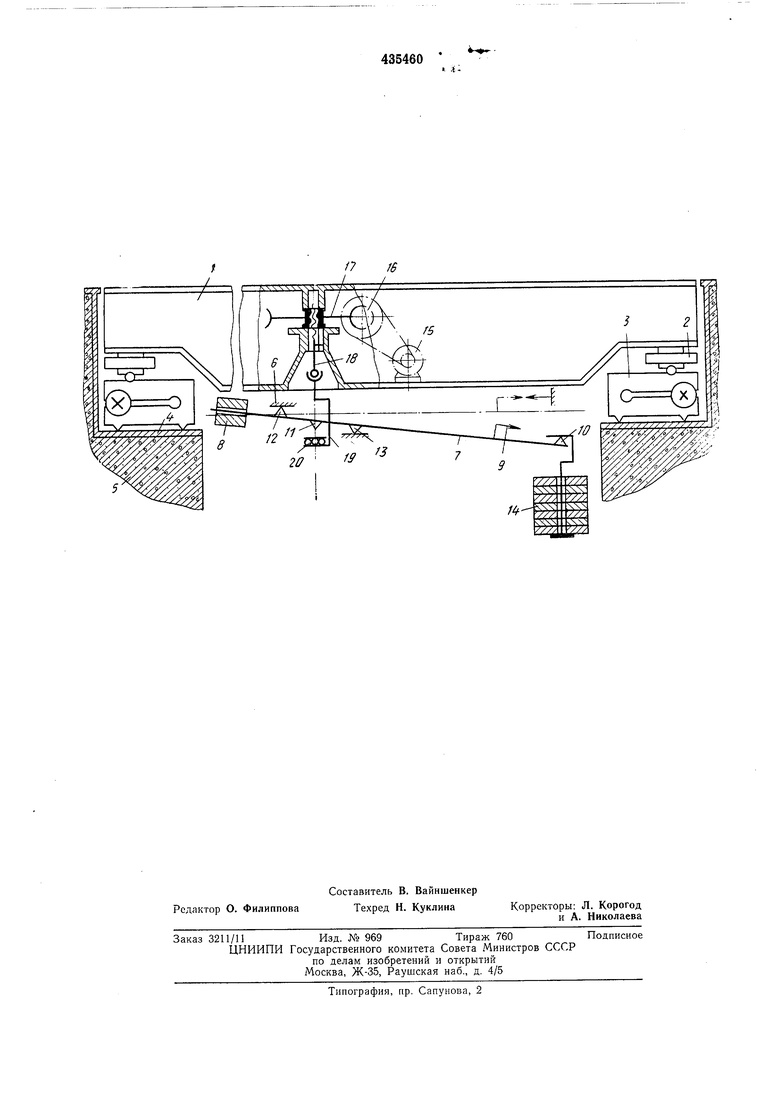
Платформенные весы состоят из весовой платформы 1, которая через самоустанавливающиеся опоры 2 опирается на силоизмерительные магнитоупругие датчики 3, установленные
на фундаментной плите 4. С фундаментом 5 весовая платформа связана устройствами продольной и поперечной стабилизации. Под платформой в ее центральной части на раме
6, связанной с опорными тумбами фундамента, установлено устройство наложения и снятия эталонной нагрузки. Устройство состоит из неравноплечего грузового рычага первого рода 7 с постоянным соотношением плеч, снередвижным противовесом 8, указателем равновесия рычага 9 и четырех призм 10, 11, 12 и 13. К длинному плечу рычага на призму 10 подвешивается груз 14.
Па ра.ме весовой платформы под настилом
смонтирован механический привод механизма наложения и снятия эталонной нагрузки, состоящей из электродвигателя 15, клиноременной (цепной) передачи 16, червячной передачи 17 и подъемного винта 18. К последнему
шаровым шарниром подвешивается захват 19 с плоской шариковой направляющей 20, в которой шарики могут перемещаться по замкнутым траекториям.
Весы работают следующим образом.
Перед включением весов в работу захват 19 находится в крайнем нижнем положении и не касается лезвия призмы 11. При этом рычаг 7 под действием опрокидывающего момента, создаваемого грузом 14, занимает наклоннее положение и опирается на призмы 12 и 13.
Таким ооразом эталонный гр.уз на си олзмерительные датчики влияния неоказывает.
В момент включения схемы весов в электрическую сеть на платформе весов не должно, быть груза. В случае ухода «нуля весов происходит автоматическая корректировка на «нуль.
Затем блок автоматизации работы весов включает электродвигатель, вращающий червячное колесо. При этом винт 18 перемещает захват 19 верх. В тот момент, когда захват касается лезвия призмы 11, начинается процесс наложения нагрузки. При этом рычаг разворачивается относительно лезвия призмы 12. Как только рычаг 7 повертывается в горузонтаут-ьдое положение (на чертеже показано штрих-пунктирной линией), срабатывает конечный переключатель и электродвигатель останавливается. Процесс приложения эталонной нагрузки к центру платформы заканчивается. Величина приложенной нагрузки определяется весом груза 14 и соотношением короткого и длинного плеч грузового рычага.
После доведения сигнала рассогласования до допустимого значения блок автом:атизации работы весов включает электродвигатель 15. в о.б,ратном направлении вращения, вследствие чего захват перемещается с рычагом вниз. В тот момент, когда лезвие призмы 13 плавно коснется подушки, связанной с рамой, захват отойдет от призмы 11 и нагрузка с весовой платформы полностью снимается. Затем захват опускается в свое крайнее нижнее положение, срабатывает конечный выключатель и электродвигатель останавливается. Прд,цесс снятия эталонной нагрузки закапчивается и весы готовы к работе.
При взвешивании, например, на весах движущихся объектов полностью устраняются динамические помехи от колебания рычага с гр.узрм. Это возможно благодаря применению описанной схемы весов, в которой грузовой рычаг полностью изолирован от источника колебаний - весовой платформы. Кроме того, благодаря размещению привода на раме платформы под настилом, облегчается его эксплуатация.
Описанные весы сохраняют свои характеристики в течение длительного срока эксплуатации. Это объяспяется тем, что весы с допускаемой погрешностью 0,5% настраиваются с
помощью нагружающего устройства рычажной системы, погрешность которого не превышает 0,1%. Для сохранения точности механизма приложения ц снятия эталонной нагрузки грузовой рычаг с грузом закрывается кожухом
(не показан), который препятствует загрязнению механизма и проникновению влаги.
Предмет изобретения
Платф.о.р,менные весы, содержащие грузоприемную платформу, опирающуюся на силоизмерительные датчики, вторичный измерительный прибор и устройство нагружения весов эталонным грузом в виде неравноплечего рычага
с постоянным грузом на одном из плеч и привода перемещения рычага, отличающиеся тем, что, с целью повышения точности взвешивания, привод перемещения рычага установлен на раме платформы и снабжен
подвижным по вертикали захватом, взаимодействующим с грузоприемной призмой рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 1973 |
|
SU398834A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ РЕАКТИВНОГО ДВИГАТЕЛЯ | 1996 |
|
RU2117272C1 |
| Устройство для взвешивания движущихся объектов | 1980 |
|
SU1364897A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| АВТОМОБИЛЕРАЗГРУЗОЧНЫЙ ВЕСОВОЙ КОМПЛЕКС | 2011 |
|
RU2453817C1 |
| Электромеханические весы | 1988 |
|
SU1818544A1 |
| ВЕСЫ ВАГОННЫЕ ПЕРЕНОСНЫЕ | 2005 |
|
RU2289106C2 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU901837A1 |
| Весы бытовые | 1988 |
|
SU1663448A1 |
| Электромеханические весы | 1986 |
|
SU1760365A1 |