Изобретение относится к обработке металлов давлением и может быть использовано для перемещения деталей (заготовок) между рабочими позициями многопозиционного штампа. .
Цель изобретения - повышение точности подачи и надежности в работе.
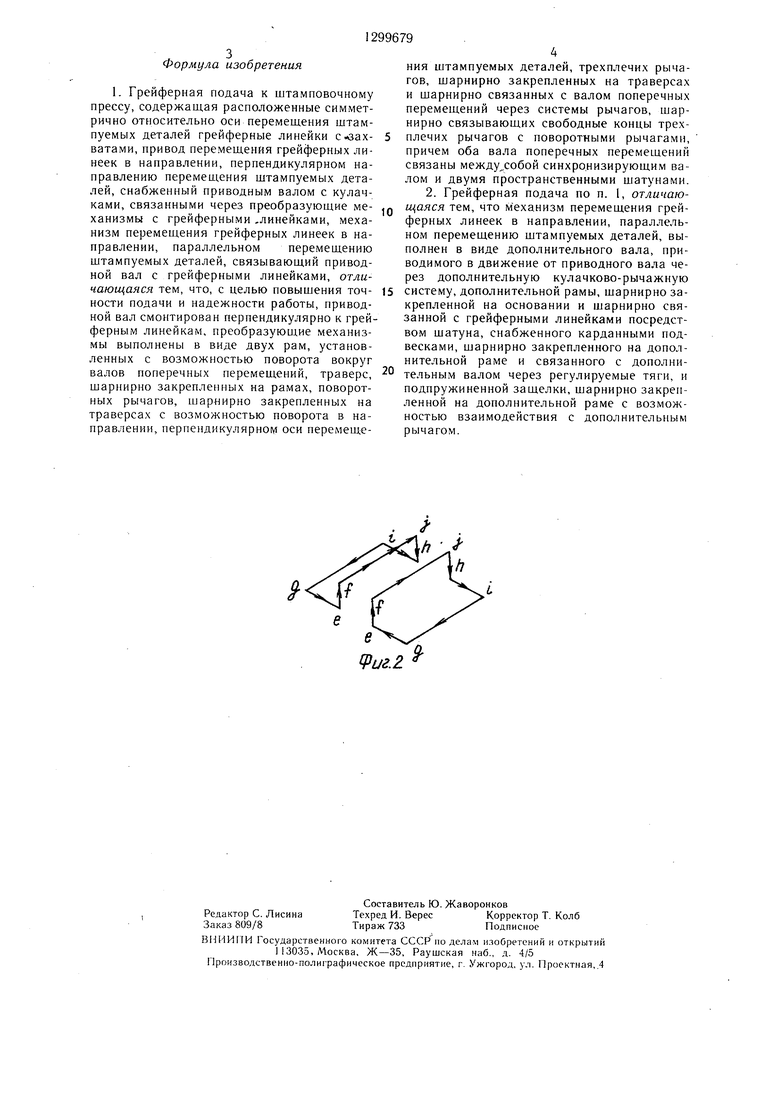
На фиг. 1 схематически изображена грейферная подача к штамповочному прессу; на фиг. 2 - схема перемещения захватов грейфернь линеек.
Подача содержит грейферные линейки 1 и 2 с захватами 3 и 4. Грейферные линейки 1 и 2 шарнирно соединены с рычагами 5 и 6, щарнирно подвешенными на траверсах 7 И 8. Посредством тяг 9 рычаги 5 и 6 соединены с трехплечими рычагами 10 и 11. Рычаги 10 и 11 установлены на траверсах 7 и 8, которые оснащены регулируемыми упорами 12 и 13, контактирующими с одним из плеч трех- плечих рычагов 10 и 11. Средние плечи трехплечих рычагов 10 и И соединены с помощью пространственных шатунов 14 и 15, оснащенных сферическими соединениями 16, с рычагами 17 и 18 валов 19 и 20 поперечных перемещений. На валу 19 поперечных перемещений неподвижно закреплено коромысло 21 с двумя роликами 22, контактирующими с кулачковым блоком 23, закрепленным на приводном валу 24. Траверсы 7 и 8 шарнирно закреплены в рамах 25 и 26, которые упираются в неподвижные упоры 27 и 28. Один из концов грейферных линеек 1 и 2 соединен с помощью шатуна 29, снабженного карданными подвесками 30 и 31 с несущим рычагом 32. Последний оснащен предохранительным рычагом 33, зафиксированным от проворота относительно несущего рычага 32 подпружиненной защелкой 34. Предохранительный рычаг 33 посредством регулируемого шатуна 35 и кронштейна 36 соединен с рычагом 37 вала 38 продольного перемещения.
10
шатун 14, который вращает трехплечий рычаг 10. Одно из плеч трехплечего рычага 10 упирается в упор 12 и при дальнейшем движении пространственного шатуна 14 траверса вместе с линейками 1 и 2 поднимается. При этом рама 25, поворачиваясь вокруг своей оси, отрывается от упора 27. Аналогичные движения совершают элементы кинематической цепи второго механизма поперечных перемещений и таким образом происходит движение захватов по участку е-/ (фиг. 2). При дальнейшем вращении вала 24 кулачковый блок 41 через ролики 40 и коромысло 39 поворачивает вал 38 продольного перемещения в направлении стрелки с, рычаг 37 через шатун 35 тол кает предохранительный рычаг 33 и связанный с ним несущий рычаг 32; линейки 1 и 2 перемещаются назад, захваты при этом движутся по участку f - / (фиг. 2). При даль- нейщем повороте приводного вала 24 вал 38
2Q продольных перемещений остается неподвижным, а вал 19 поперечных перемещений поворачивается в направлении стрелки Ь. Пространственный шатун 14, а вместе с ним траверса 7 и грейферные линейки 1 и 2 опускаются до тех пор, пока рама 25 не доходит до упора 27. При этом захваты движутся по участку / - h (фиг. 2). Дальнейший поворот вала 19 поперечных перемещений в направлении стрелки /; приводит к тому, что одно из плеч трехплечего рычага 10 отрывается от упора 12, трехплечий рычаг 10 поворачивается и через тяги 9 раздвигает рычаги 5 и 6. Траверса 7 при этом остается неподвижной и захваты движутся по участку h-i (фиг. 2). Далее вал 19 поперечных переме цений останавливается, а вал 38 продольных перемещений поворачивается в направлении стрелки d и через рычаг 37, шатун 35 и рычаги 32 и 33 тянет грейферные линейки 1 и 2 вперед, при этом захваты проходят по участку /-g. При дальнейн1ем повороте привод25
30
35
На валу 38 продольного перемещения не- 40 ного вала 24 вал 38 продольных переме- подвижно закреплено коромысло 39 с двумя щений останавливается, а вал 19 попереч- роликами 40, контактирующими с кулачко- ных перемещений, поворачиваясь по стрелке вым блоком 41, закрепленным на привод- а через пространственный шатун 14, повора- ном валу 24, приводящимся во вращение чивает трехплечий рычаг 10, который через приводом (не показан). Винт 42 служит для тяги 9 сближает рычаги 5 и 6 смыка- регулирования положения кронщтейна 36 и 45 ния. Захваты при этом проходят участок регулирования таким образом длины рычага g-е. Далее трехплечий рычаг подходит 37. Синхронизирующий вал 43 и пространст- к упору 12 и пространственный шатун 14,
продолжая свое движение вверх, поднимает траверсу 7, а вместе с ней и линейки 1 и 2. Цикл повторяется.
венные шатуны 44 и 45 служат для синхронизации движений обоих механизмов поперечных перемещений.
50
Грейферная подача работает следующим образом.
При вращении вала 24 кулачковый блок 23 через ролики 22 и коромысло 21 проворачивает вал 19 поперечных перемеп-1ений в направлении стрелки а. Рычаг 17 поворачивается и тянет вверх пространственный
шатун 14, который вращает трехплечий рычаг 10. Одно из плеч трехплечего рычага 10 упирается в упор 12 и при дальнейшем движении пространственного шатуна 14 траверса вместе с линейками 1 и 2 поднимается. При этом рама 25, поворачиваясь вокруг своей оси, отрывается от упора 27. Аналогичные движения совершают элементы кинематической цепи второго механизма поперечных перемещений и таким образом происходит движение захватов по участку е-/ (фиг. 2). При дальнейшем вращении вала 24 кулачковый блок 41 через ролики 40 и коромысло 39 поворачивает вал 38 продольного перемещения в направлении стрелки с, рычаг 37 через шатун 35 тол кает предохранительный рычаг 33 и связанный с ним несущий рычаг 32; линейки 1 и 2 перемещаются назад, захваты при этом движутся по участку f - / (фиг. 2). При даль- нейщем повороте приводного вала 24 вал 38
Q продольных перемещений остается неподвижным, а вал 19 поперечных перемещений поворачивается в направлении стрелки Ь. Пространственный шатун 14, а вместе с ним траверса 7 и грейферные линейки 1 и 2 опускаются до тех пор, пока рама 25 не доходит до упора 27. При этом захваты движутся по участку / - h (фиг. 2). Дальнейший поворот вала 19 поперечных перемещений в направлении стрелки /; приводит к тому, что одно из плеч трехплечего рычага 10 отрывается от упора 12, трехплечий рычаг 10 поворачивается и через тяги 9 раздвигает рычаги 5 и 6. Траверса 7 при этом остается неподвижной и захваты движутся по участку h-i (фиг. 2). Далее вал 19 поперечных переме цений останавливается, а вал 38 продольных перемещений поворачивается в направлении стрелки d и через рычаг 37, шатун 35 и рычаги 32 и 33 тянет грейферные линейки 1 и 2 вперед, при этом захваты проходят по участку /-g. При дальнейн1ем повороте привод5
0
5
продолжая свое движение вверх, поднимает траверсу 7, а вместе с ней и линейки 1 и 2. Цикл повторяется.
50
При каждом обороте приводного вала происходит перемещение заготовок от одной пары захватов к другой по последовательным позициям штампа. Команда на 55 включение пресса в цикле с подачей выдается от командоаппарата подачи (не показан), получающего вращение от кулачкового вала.
Формула изобретения
1. Грейферная подача к штамповочному прессу, содержащая расположенные симметрично относительно оси перемещения штампуемых деталей грейферные линейки с«захватами, привод перемещения грейферных линеек в направлении, перпендикулярном направлению перемещения щтампуемых деталей, снабженный приводным валом с кулачния штампуемых деталей, трехплечих рычагов, шарнирно закрепленных на траверсах и шарнирно связанных с валом поперечных перемещений через системы рычагов, щар- нирно связывающих свободные концы трехплечих рычагов с поворотными рычагами, причем оба вала поперечных перемещений связаны между,собой синхронизирующим валом и двумя пространственными шатунами. 2. Грейферная подача по п. 1, отличаюками, связанными через преобразующие ме- .,. щаяся тем, что м еханизм перемещения грей- ханизмы с грейферными .линейками, механизм перемещения грейферных линеек в направлении, параллельном перемещению щтампуемых деталей, связывающий приводной вал с грейферными линейками, отлиферных линеек в направлении, параллельном перемещению щтампуемых деталей, выполнен в виде дополнительного вала, приводимого в движение от приводного вала через дополнительную кулачково-рычажную
чающаяся тем, что, с целью повышения точ- is систему, дополнительной рамы, шарнирноза- ности подачи и надежности работы, привод- крепленной на основании и шарнирно свя- ной вал смонтирован перпендикулярно к грейферным линейкам, преобразующие механиззанной с грейферными линейками посредством щатуна, снабженного карданными подвесками, шарнирно закрепленного на дополнительной раме и связанного с дополнительным валом через регулируемые тяги, и подпружиненной защелки, шарнирно закрепленной на дополнительной раме с возможностью взаимодействия с дополнительным рычагом.
мы выполнены в виде двух рам, установленных с возможностью поворота вокруг валов поперечных перемещений, траверс, шарнирно закрепленных на рамах, поворотных рычагов, шарнирно закрепленных на траверсах с возможностью поворота в направлении, перпендикулярном оси перемещения штампуемых деталей, трехплечих рычагов, шарнирно закрепленных на траверсах и шарнирно связанных с валом поперечных перемещений через системы рычагов, щар- нирно связывающих свободные концы трехплечих рычагов с поворотными рычагами, причем оба вала поперечных перемещений связаны между,собой синхронизирующим валом и двумя пространственными шатунами. 2. Грейферная подача по п. 1, отличающаяся тем, что м еханизм перемещения грей-
ферных линеек в направлении, параллельном перемещению щтампуемых деталей, выполнен в виде дополнительного вала, приводимого в движение от приводного вала через дополнительную кулачково-рычажную
систему, дополнительной рамы, шарнирноза- крепленной на основании и шарнирно свя-
занной с грейферными линейками посредством щатуна, снабженного карданными подвесками, шарнирно закрепленного на дополнительной раме и связанного с дополнительным валом через регулируемые тяги, и подпружиненной защелки, шарнирно закрепленной на дополнительной раме с возможностью взаимодействия с дополнительным рычагом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1995 |
|
RU2090291C1 |
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1998 |
|
RU2146618C1 |
| Устройство для периодической подачи материала в зоне обработки | 1988 |
|
SU1637911A1 |
| Грейферный механизм | 1982 |
|
SU1077683A1 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| Грейферное подающее устройство к прессу | 1987 |
|
SU1433594A1 |
| Устройство для перемещения материала | 1987 |
|
SU1447493A1 |
| Грейферный механизм | 1986 |
|
SU1449201A1 |
Изобретение относится к области обработки металлов давлением и быть использовано для перемещения деталей между рабочими позициями многопозиционного штампа. Целью изобретения является повышение точности шага подачи и надежности работы грейферной юдачи. Подача содержит грейферные 1 и 2, подвешенные с помощью сфери.ческих нюрниров на двух механизмах поперечных пе)емен1е- ний 3 и 4, и соединенные одним из концов с механизмом продольного перемещения 5. При вращении кулачкового вала 6 приводится в периодическое врапдение вал продольного перемещения 7 и валы поперечных перемещений 8 и 9, связанные между собой Синхронизирующим валом 10. Пространственная рычажная система преобразует периодическое движение валов 7, 8, 9 в движение грейферных линеек 1 и 2 по циклу за хват-подъем-перенос-опускание-раскрытие- возврат. Имеются регулировочные элементы, позволяющие изменять niar подачи. 1 з.н. ф-лы, 2 ил. se ; S/ ю со со CD СО /
.2
| РТМ | |||
| Транспортер для перевозки товарных вагонов по трамвайным путям | 1919 |
|
SU105A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Ростов-на-Дону, 1977, с | |||
| Тепловой измеритель силы тока | 1921 |
|
SU267A1 |
| Индукционная катушка | 1920 |
|
SU187A1 |
