Изобретение относится к машиностроению и может быть использовано для перемещения заготовок между рабочими позициями многопозиционного пресса.
Целью изобретения является расширение технологических возможностей за счет обеспечения дополнительного вертикального перемещения линеек.
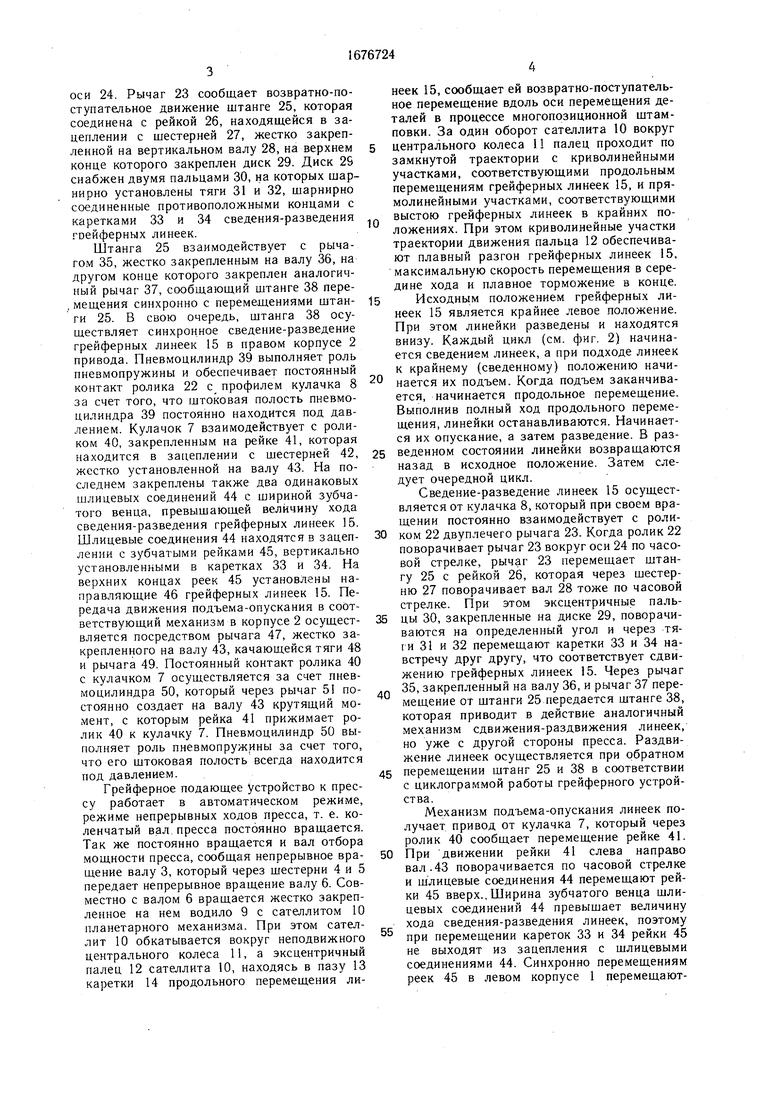
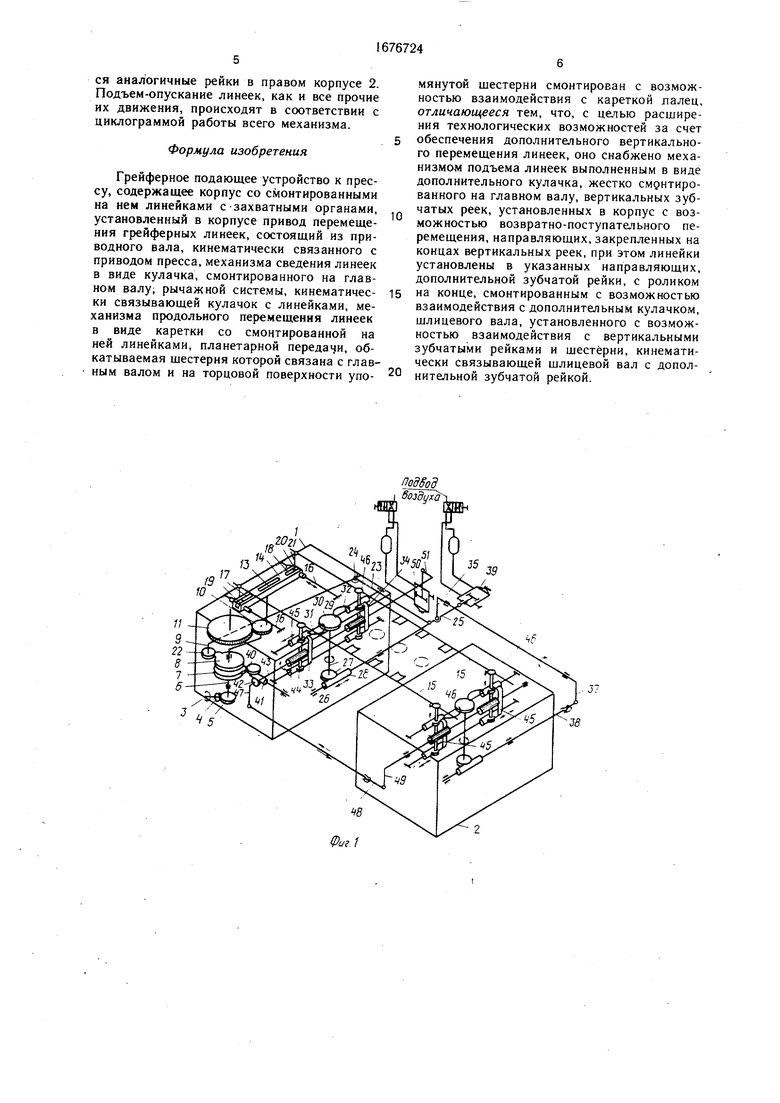
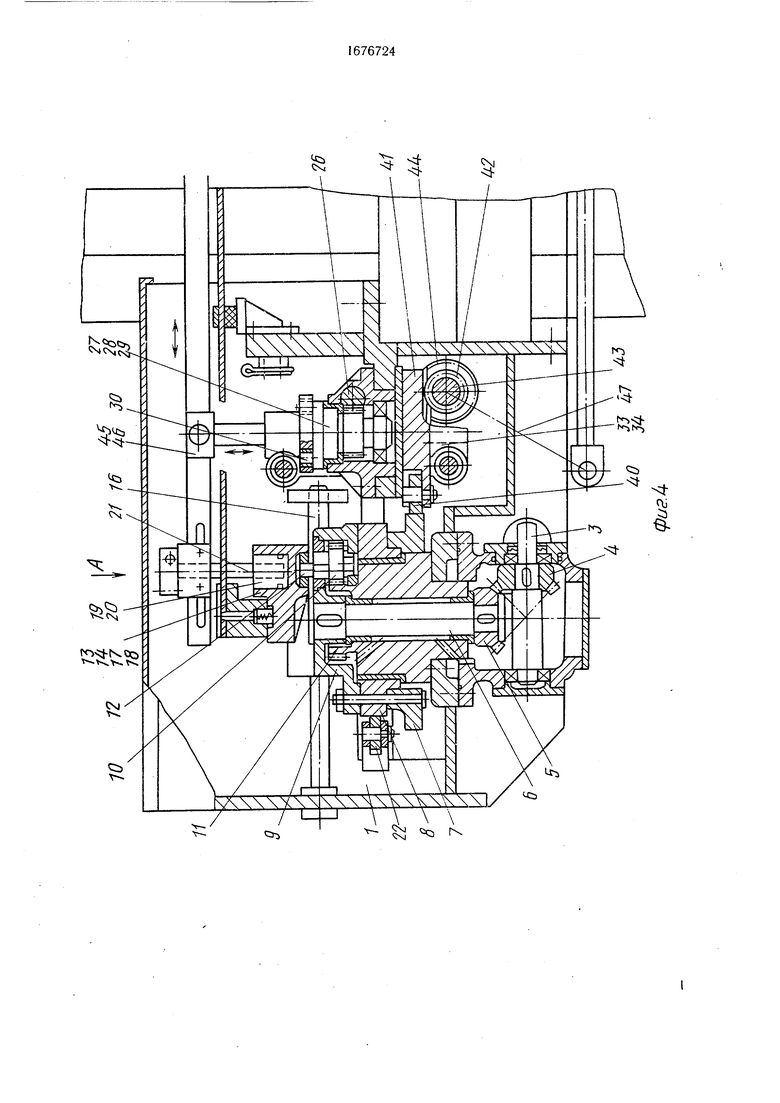
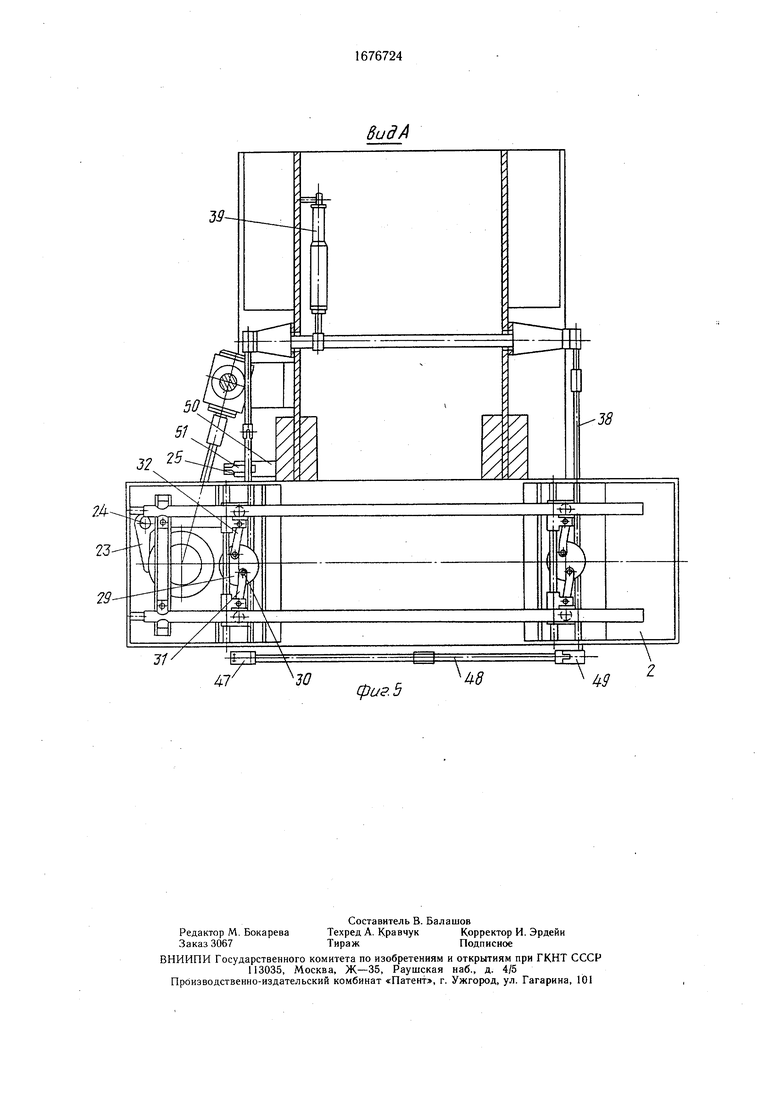
На фиг. 1 изображена кинематическая схема грейферного подающего устройства; на фиг. 2 - график перемещений грейферных линеек; на фиг. 3 - циклограмма работы устройства; на фиг. 4 - привод грейферных линеек; на фиг. 5 - вид по стрелке А на фиг. 4.
Грейферное подающее устройство к прессу содержит корпус 1, закрепленный с левой стороны на станине пресса (не показан), и корпус 2, закрепленный с правой стороны. Привод гейферного устройства осуществляется от вала 3 с жестко закрепленной на нем шестерней 4. Вал 3 получает вращение от механизма отбора мощности пресса.. Шестерня 4 через шестерню 5 сообщает вращение вертикальному валу 6 с закрепленными на нем кулачками 7 и 8 ii во- дилом 9 с сателлитом 10, обкатывающимся вокруг неподвижного центрального колеса 1 1. На сателлите 10 эксцентрично установлен палец 12, который входит в паз 13 каретки 14 продольного перемещения грейферных линеек 15. Каретка 14 подвижно установлена на горизонтальных колонках 16. В пазах 17 и 18 каретки 14 подвижно установлены ползушки 19 и 20, в которых, в свою очередь, подвижно установлены вертикальные колонки 21, закрепленные на концах грейферных линеек 15. Кулачок 8 взаимодействует с роликом 22, закрепленным на двуплечем рычаге 23, поворотном вокруг
05vl ГО
оси 24. Рычаг 23 сообщает возвратно-поступательное движение штанге 25, которая соединена с рейкой 26, находящейся в зацеплении с шестерней 27, жестко закрепленной на вертикальном валу 28, на верхнем конце которого закреплен диск 29. Диск 29 снабжен двумя пальцами 30, на которых шар нирно установлены тяги 31 и 32, шарнирно соединенные противоположными концами с каретками 33 и 34 сведения-разведения гоейферных линеек.
Штанга 25 взаимодействует с рычагом 35, жестко закрепленным на валу 36, на другом конце которого закреплен аналогичный рычаг 37, сообщающий штанге 38 пере- , мещения синхронно с перемещениями штанги 25. В свою очередь, штанга 38 осуществляет синхронное сведение-разведение грейферных линеек 15 в правом корпусе 2 привода. Пневмоцилиндр 39 выполняет роль пневмопружины и обеспечивает постоянный контакт ролика 22 с профилем кулачка 8 за счет того, что штоковая полость пневмо- цилиндра 39 постоянно находится под давлением. Кулачок 7 взаимодействует с роликом 40, закрепленным на рейке 41, которая находится в зацеплении с шестерней 42, жестко установленной на валу 43. На последнем закреплены также два одинаковых шлицевых соединений 44 с шириной зубчатого венца, превышающей величину хода сведения-разведения грейферных линеек 15. Шлицевые соединения 44 находятся в зацеплении с зубчатыми рейками 45, вертикально установленными в каретках 33 и 34. На верхних концах реек 45 установлены направляющие 46 грейферных линеек 15. Передача движения подъема-опускания в соответствующий механизм в корпусе 2 осуществляется посредством рычага 47, жестко закрепленного на валу 43, качающейся тяги 48 и рычага 49. Постоянный контакт ролика 40 с кулачком 7 осуществляется за счет пнев- моцилиндра 50, который через рычаг 51 постоянно создает на валу 43 крутящий момент, с которым рейка 41 прижимает ролик 40 к кулачку 7. Пневмоцилиндр 50 выполняет роль пневмопружины за счет того, что его штоковая полость всегда находится под давлением.
Грейферное подающее устройство к прессу работает в автоматическом режиме, режиме непрерывных ходов пресса, т. е. коленчатый вал пресса постоянно вращается. Так же постоянно вращается и вал отбора мощности пресса, сообщая непрерывное вращение валу 3, который через шестерни 4 и 5 передает непрерывное вращение валу 6. Совместно с валом 6 вращается жестко закрепленное на нем водило 9 с сателлитом 10 планетарного механизма. При этом сателлит 10 обкатывается вокруг неподвижного центрального колеса 11, а эксцентричный палец 12 сателлита 10, находясь в пазу 13 каретки 14 продольного перемещения линеек 15, сообщает ей воз врат но-поступательное перемещение вдоль оси перемещения деталей в процессе многопозиционной штамповки. За один оборот сателлита 10 вокруг
центрального колеса 11 палец проходит по замкнутой траектории с криволинейными участками, соответствующими продольным перемещениям грейферных линеек 15, и прямолинейными участками, соответствующими выстою грейферных линеек в крайних положениях. При этом криволинейные участки траектории движения пальца 12 обеспечивают плавный разгон грейферных линеек 15, максимальную скорость перемещения в середине хода и плавное торможение в конце.
Исходным положением грейферных линеек 15 является крайнее левое положение. При этом линейки разведены и находятся внизу. Каждый цикл (см. фиг. 2) начинается сведением линеек, а при подходе линеек к крайнему (сведенному) положению начи нается их подъем. Когда подъем заканчивается, начинается продольное перемещение. Выполнив полный ход продольного перемещения, линейки останавливаются. Начинается их опускание, а затем разведение. В раз5 веденном состоянии линейки возвращаются назад в исходное положение. Затем следует очередной цикл.
Сведение-разведение линеек 15 осуществляется от кулачка 8, который при своем вращении постоянно взаимодействует с роли0 ком 22 двуплечего рычага 23. Когда ролик 22 поворачивает рычаг 23 вокруг оси 24 по часовой стрелке, рычаг 23 перемещает штангу 25 с рейкой 26, которая через шестерню 27 поворачивает вал 28 тоже по часовой стрелке. При этом эксцентричные паль5 цы 30, закрепленные на диске 29, поворачиваются на определенный угол и через тяги 31 и 32 перемещают каретки 33 и 34 навстречу друг другу, что соответствует сдвижению грейферных линеек 15. Через рычаг
35, закрепленный на валу 36, и рычаг 37 перемещение от штанги 25 передается штанге 38, которая приводит в действие аналогичный механизм сдвижения-раздвижения линеек, но уже с другой стороны пресса. Раздви- жение линеек осуществляется при обратном
5 перемещении штанг 25 и 38 в соответствии с циклограммой работы грейферного устройства.
Механизм подъема-опускания линеек получает привод от кулачка 7, который через ролик 40 сообщает перемещение рейке 41.
0 При движении рейки 41 слева направо вал.43 поворачивается по часовой стрелке и шлицевые соединения 44 перемещают рейки 45 вверх., Ширина зубчатого венца шлицевых соединений 44 превышает величину хода сведения-разведения линеек, поэтому
° при перемещении кареток 33 и 34 рейки 45 не выходят из зацепления с шлицевыми соединениями 44. Синхронно перемещениям реек 45 в левом корпусе 1 перемещаются аналогичные рейки в правом корпусе 2 Подъем-опускание линеек, как и все прочие их движения, происходят в соответствии с циклограммой работы всего механизма.
Формула изобретения
Грейферное подающее устройство к прессу, содержащее корпус со смонтированными на нем линейками с захватными органами, установленный в корпусе привод перемещения грейферных линеек, состоящий из приводного вала, кинематически связанного с приводом пресса, механизма сведения линеек в виде кулачка, смонтированного на главном валу, рычажной системы, кинематически связывающей кулачок с линейками, механизма продольного перемещения линеек в виде каретки со смонтированной на ней линейками, планетарной передачи, обкатываемая шестерня которой связана с главным валом и на торцовой поверхности упо
0
мянутой шестерни смонтирован с возможностью взаимодействия с кареткой лалец, отличающееся тем, что, с целью расширения технологических возможностей за счет обеспечения дополнительного вертикального перемещения линеек, оно снабжено механизмом подъема линеек выполненным в виде дополнительного кулачка, жестко смднтиро- ванного на главном валу, вертикальных зубчатых реек, установленных в корпус с возможностью возвратно-поступательного перемещения, направляющих, закрепленных на концах вертикальных реек, при этом линейки установлены в указанных направляющих, дополнительной зубчатой рейки, с роликом на конце, смонтированным с возможностью взаимодействия с дополнительным кулачком, шлицевого вала, установленного с возможностью взаимодействия с вертикальными зубчатыми рейками и шестерни, кинематически связывающей шлицевой вал с дополнительной зубчатой рейкой
| название | год | авторы | номер документа |
|---|---|---|---|
| Грейферное подающее устройство | 1983 |
|
SU1138213A1 |
| Устройство для перемещения материала | 1987 |
|
SU1447493A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Устройство для привода подающей линейки для многопозиционного пресса | 1986 |
|
SU1741603A3 |
| Многопозиционный пресс для листовой штамповки | 1988 |
|
SU1562049A1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| МНОГОПОЗИЦИОННЫЙ ПРЕСС | 1992 |
|
RU2013173C1 |
| Грейферное устройство для перемещения заготовок к многопозиционному прессу | 1986 |
|
SU1349854A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| ГРЕЙФЕРНАЯ ПОДАЧА К ШТАМПОВОЧНОМУ ПРЕССУ | 1998 |
|
RU2146618C1 |
Изобретение относится к машиностроению и может быть использовано для перемещения заготовок между рабочими поршнями многопозиционного пресса. Цель изобретения - расширение технологических возможностей за счет обеспечения дополнительного вертикального перемещения линеек. Сведение-разведение линеек 15 осуществляется от кулачка 8, который взаимодействует с роликом 22 двуплечего рычага 23. Рычаг 23 перемещает штангу 25 с рейкой 26, которая через шестерню 27 поворачивает вал 28. При этом пальцы 30, закрепленные на диске 29, через тяги 31 и 32 перемещают каретки 33 и 34 навстречу друг другу. Механизм подъема-опускания линеек получает привод от кулачка 7, который через ролик 40 сообщает перемещение рейке 41. При движении рейки 41 вал 43 поворачивается и шли- цевые соединения 44 перемещают рейки 45 вверх. 5 ил.
/8
45
Подвод 6оздухсГПеремещение вперед
Подъем /
Сведение
3J3
300°
Подъем линеен
Сведение линеек
№
227
Опускание
Раз&едение
воздрат
ФИ2.2
Код линеек дперед
W°
Опускание линеек
90° 95°
Разделение линеек
Шс Ход линеек
180°
нт Фиг.З
угпф
in 1Ј
f
(М t-- СО Сto
cf I 1 I /, 91
I K % 9i ll % I u
Ъ929
Вид А
фиг. 5
| Розенц Г | |||
| М., Убрятов А | |||
| А | |||
| и Петин А | |||
| А Механизация и автоматизация листовой штамповки в автомобилестроении | |||
| М.: Машиностроение, 1983, с | |||
| Приспособление для записи звуковых колебаний | 1921 |
|
SU212A1 |
| Топливник с глухим подом | 1918 |
|
SU141A1 |
