I
Известны ограничители грузоподъемности стреловых кранов, содержащие датчик усилий, связанный посредством перен.астраиБающего устройства с рычагом, взаимодействующим с конечным выключателем приводных механизмов крада. Однако перенастройка таких ограничителей при изменении условий работы крана, налример гири из менении длины стрелы, выдвижении аутриггеро в, производится устройствами, установленными непосредственно на ограничителе и воздействующими на конечный выключатель системы управления приводом крана. Ограничители .грузоподъемности этото типа обычно располагаются вблизи датчиков силового ;И1М1пульса и находятся яа значительном расстоянии от пульта управления краном, часто в неудобных и малодоступных местах. Поэтому перенастройка их затруднительна и требует дополнительного времени для подготовки Крана к р.аботе.
Цель изобретения - обеспечение дистанционной настройки ограничителя грузоподъемности. Для этого перенастраивающее устройство выполнено в виде поворотного Т-образного рычага, связанного с датчикоМ усилий и взаимодействующего посредством установленной с воЗМожностью продольного перемещения во втулке рычага подпружиненной штанги 1C рыч1аго,м конечного выключателя, причем по обоим концам поп еречной оси противоположного конца штанги неподвижно смонтированы блоки, один из которых связан через промежуточные блоки гиб.кими тягами с датчиками, определяющими режимы работы ,крана. Кроме того, для сохранения равновесия и установленного соотнощения плеч рычажной
V системы при ее угловом перемещении второй блок штанги гибкой связью соединен с блоком, неподвижно установленным на опоре
Т-обр.азного рычага. Датчик усилий может быть выполнен в виде гидравлического трансформатора.
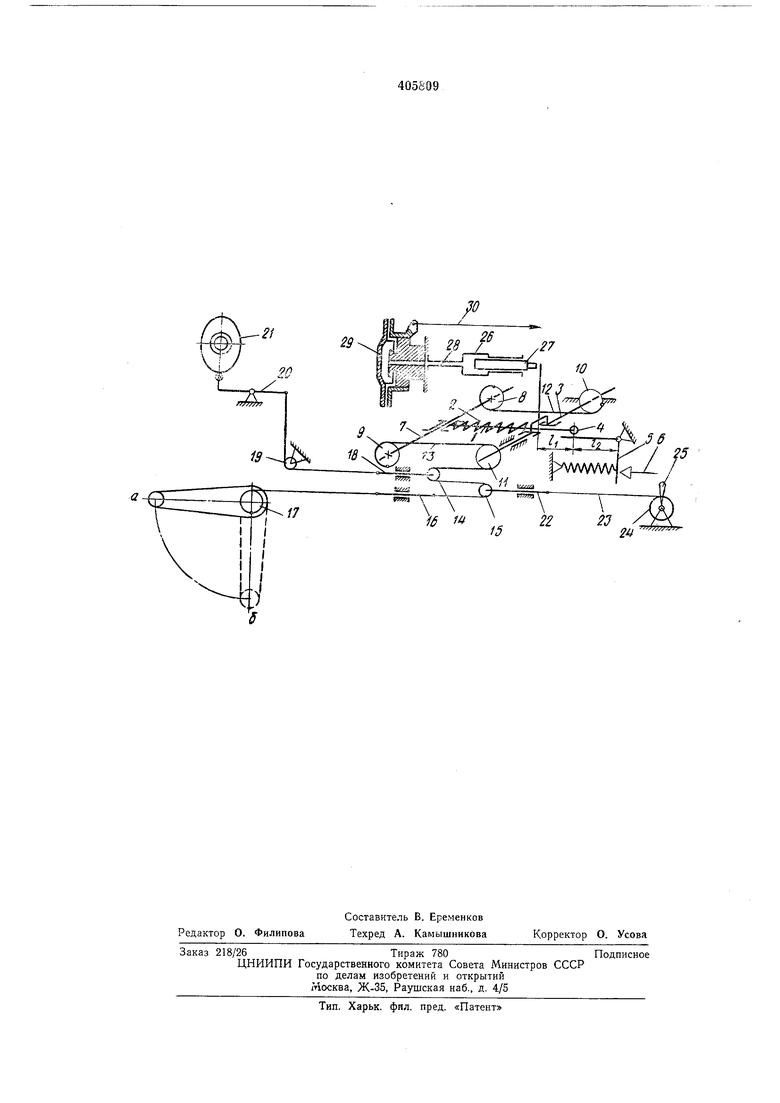
На чертеже схематически изображен предлагаемый ограничитель грузоподъемности.
На подвижную штаигу /, перемещающуюся в осевом направлении, насажена пружина 2, которая одним .концом опирается на тыльную часть штанги, другим - на поворотный Т-образ1Ный 3. Одним концом штанга 1
взаимодействует через ролик 4 с подпружиненным рычагом 5 конечного выключателя 6 системы упр авления приводом крана. На противоположном конце штанги на вращающейся поперечной оси 7 неподвижно смонтированы
блоки 8 к 9, связанные соответственно с блоком 10, закрепленным на опоре рычага 8, и блоком 11, смонтированным яа рычаге. Причем блоки 8 и 10 соединены отрезком гибкой связи 12. А неподвижный блок 9 связан с гиббой связью 13 со свободно вращающимся блоком 11 рычага и далее, через отклоняющие ролики 14 и 15, с тягой 16, связанной с вьшосными опорами 17 гибкой связью, которая может быть заменена гидравлической или электрической. Ролик 14, имеющий кроме вращательного движения .и доступательное, связан через тягу 18 и ролик 19 с рычагом 20, взаимадействующи.м с корректирующей шайбой 21 соответствующего .профиля, смоитироваиной на опорио-ловоротном устройстве. Ролик 15, имеющий как .вращательное, так и посту/пательное движение, через тягу 22 и гибкую связь 23 с лимбом 24 иастройки ограничителя в зависимости от изменения длины грузоподъемной стрелы крана. Лимб 24 имеет рукоятку 25 с -фиксирующим устройство м. Гидравлический цилиндр 26 Плунжером 27, взаимодействующим с Т-образным рычагом 3, соединен трубкой 28 с внутренней полостью диафрагмы 29. Внутренняя полость диафрагмы 29, трубка 28 и внутренняя полость цилиндра 26 заполняются рабочей жидкостью. Корпус диафрагмы 29 связан с ветвью стреловой оттяжки 30.
Подвижная щтапга /, перемещаемая в осевом направлении, взаимодействует через ролик 4 с подпружиненным рычагом 5, с выключателем 6 системы упра1вления приводом «рана. Принцип перенастройки предлагаемого ограничителя заключается в следующем. Изменение положения выносных опор 17 от а до б (фиг. 1) вызывает смещение тяги 16 влево, вследствие чего гибкая связь 13 также получит перемещение, пов.орачи.вая блок 9, а следовательно, и ось 7 с блоком 8 по часовой стрелке. При этом штанга / перемещается вправо, сжимая -пружину 2 ш изменяя соотношение ллеч /1 и /2, тем самым осуществляя дистанционную перенастройку ограничителя грузоподъемности в зависимости от изменения положения ребра опрокидывания.
Изменение положения выносны.х опор от б до а вызывает смещение штанги / под действием пружины 2 .влево, вследствие чего ограничитель будет перенастраиваться в обратном нап1равлении. Изменение угла поворота поворотной части крана по часовой стрелке или в обратном направлении вызовет соответствующее угловое смещение шайбы 21. В результате рычагом 20, тягой 18 и роликом 14 происходит дистанционная перенастройка ограничителя ло тому же принципу, что -при изменении ттоложения выносных опор, но в зависимости от положения ло1воротной части крана относительно KOHTyipa ребра опрокидывания. При изменении длины стрелы дистанционная
перенастройка ограничителя ведется по принци.пу, описанному выше, с по.мощью лимба 24. На кранах с телескопически.ми стрел.ам.и перенастройка осуществляется в зависимости от изменения длины стрелы автоматически. При этом тяга 22 соединяется -гибкой связью 23 с выдвижной секцией телеокопической стрелы через соответствующую нередачу. Трансформация усилия от ветви стреловой оттяжки 30
к подвижной щтанге 1 через Т-образный рычаг Э ведется за счет соотношения внутреннего диаметра диафрагмы 29 с диаметро-м .плунжер а 27. При срабатывании ограничителя щтанга / во время углового перемещения
в любоМ ноложении находится в равновесии за счет равенства нулю сум-мы м.оментов относительно оси поворота, которой служит Т-образный рычаг 5, в силу того, что усилия, вызываемые натяжением пружины 2 в гибких связях 12 и 13, равны и расположены относительно упо.мянутой осина одинаковых расстояниях во взаимно противополбжных положениях.
Предмет изобретен.и я
1.Ограничитель грузоподъемности стреловых кр:анов, содержащий датчик усилий, связанный посредством перенастраивающего устройства с рычагом, Взаимодействующим с конечным выключателем приводных механизмов крана, отличающийся тем, что, с целью обеспечения дистанционной настройки ограничителя -При .изменении условий работы крана,
неренастр аивающее устройство выполнено е виде поворотного Т-образного рычага, связанного с датчиком усилий и взаимодействующего носредством установленной с возможностью продольного перемещения во втулке рычага
подпружиненной штанги с рычагом конечного ыключателя, причем по обоим концам поперечной оси противоположного .конца щтанги неподвижно смонтированы блоки, один из которых связан через промежуточные блоки гибкими тягами с датчиками, определяющими режимы работы крана.
2.Ограничитель по п. 1, отличающийся тем, что, с целью сохранения равновесия ;и уста.новленного соотнощения плеч рычажной системы
при ее угловом перемещении, второй блок штанги гибкой связью соединен с блоком, неподвижно установленным на опоре Т-образного рычага.
3.Ограничитель по п. 1, отличающийся тем, что датчик усилий выполнен в виде гидравлического трансформатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ограничитель грузоподъемности стрелового крана | 1958 |
|
SU118961A1 |
| Ограничитель грузоподъемности стрелового крана | 1983 |
|
SU1123986A1 |
| ОГРАНИЧИТЕЛЬ ГРУЗОПОДЪЕМНОСТИ КРАНА (ВАРИАНТЫ) | 1998 |
|
RU2145568C1 |
| Указатель длины вытравленного грузового каната грузоподъемного средства | 1990 |
|
SU1752714A2 |
| Указатель длины вытравленного грузового каната грузоподъемного средства | 1989 |
|
SU1654244A2 |
| Ограничитель грузоподъемности для стрелового крана | 1977 |
|
SU622752A1 |
| Ограничитель грузового момента для портальных кранов деррикового типа | 1960 |
|
SU136023A1 |
| Ограничитель грузоподъемности стреловых подъемных кранов | 1956 |
|
SU107814A1 |
| Ограничитель грузоподъемности стреловых кранов | 1956 |
|
SU106831A1 |
| ОГРАНИЧИТЕЛЬ ВЫСОТЫ ПОДЪЕМА ГРУЗОЗАХВАТНОГО УСТРОЙСТВА ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2401793C1 |