1
Изобретенне относится к области систем автоматического унравлення электроприводом постоянного тока и может применяться во многих отраслях промышленности для приводов, управляемых но принципу носледовательной коррекции контуров регулирования скорости и якорного тока двигателя.
Известен способ управления электроприводом постоянного тока, выполненным по системе подчиненного регулировання с последовательной коррекцией контуров регулирования тока и скорости двигателя, путем подачи на вход регулятора тока сигнала производной тока при управляющем и возмущающем воздействиях.
Недостатком известного способа управления электроприводом постоянного тока является некачественный нереходный процесс скорости при возмущающем воздействии, а также якорного тока нри работе привода иа унор или при разгоне со статическим момептом. Известные методы ликвидации этих недостатков приводят к сложным регуляторам якорного тока и задатчикам интенсивности скорости двигателя с нелинейной характеристикой.
По предлагаемому способу с целью улучщения динамики привода дополнительно на вход регулятора скорости подают сигнал производной напряжения задания и при равенст1:С пулю э. д. с. двигателя сигналы производной тока и производной напряжения задания устраняют.
Точная нередаточная функция корректирующих звеньев но возмущению имеет следующий вид:
а)для статической системы
. 27-п (рТ„ -Ь 1) р2Т„ (рГ|, -f 1) 1
Гм (рГэ + 1)
б)для астатической системы
/ 87 8 г„ (рт„ -г 1) , (р Г,, Ч-1) -: 1:
1 +
/TCPT -f IXpSTn-f 1) где:
Т„ - малая постоянная времени токового
контура; Т„ - электромеханическая постоянная
времени;
Тэ - ностоянная времени якорной цени; р - оператор Лапласа. Точная передаточпая фупкция корректиующих звеньев по управленню имеет следуюий вид:
а)для статической системы
р2Гп irnCpT-n-f 1)
1 + Тм (рТ + 1)
б)для астатической системы
p28rf,.8r,,(prn-f 1)
1 +
ТЛ/ ТэЧ-ЛСрВГп-Ц)
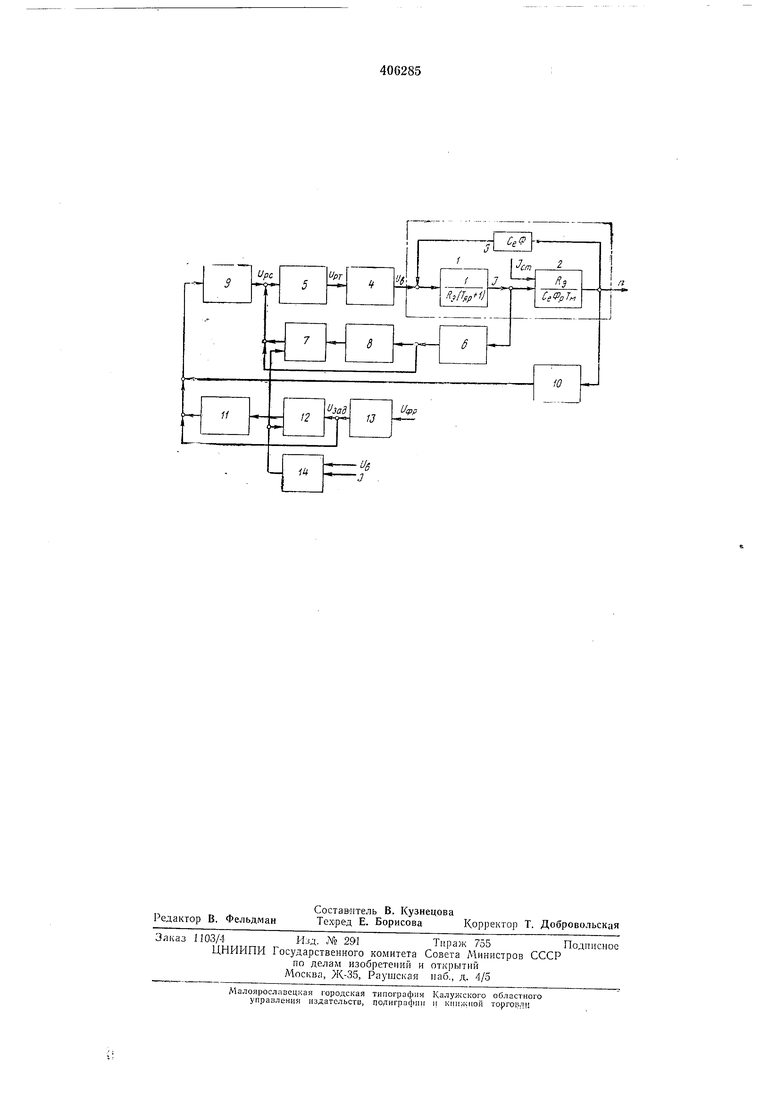
На чертеже приведена структурная ехема системы регулирования скорости двигателя ностоянного тока.
Система подчинениого регулирования скорости двигателя иостоянного тока включает в себя объект регулирования - двигатель ностоянного тока независимого возбхждення, модель которого состоит из носледовательно включенных аиернодического / и интегрального 2 звеньев, охваченных отрицательной обратной связью по э. д. с. 5; контур регулирования якорного тока двигателя, состояш,ий из объекта регулирования ио нознции У, нреобразователя 4, рег Лятора тока 5, датчика тока 6, логического элемента 7, корректируюгцего звеиа но возмугцению 8 Koirryp регхлироваиия скорости врагценпя двигателя; состоящий из объекта регулирования в виде контура регулирования якорного тока но нозиции 2, регулятора скорости 5, датчика скоростн 10, корректирующего звена ио т1равленню //, логического элемента /, задатчнка интеисивности 13, датчика э. д. с. 14.
При управляющем воздействии скачкообразный сигнал фазовыирямительиого устройства преобразуется задатчиком интенсивности 13 в линейно нарастающий (уменьщающийся) сигиал, программирующий измеиение во времеии скорости вращения двигателя. В зависимости от режима работы ирнвода логические элемеиты 7 и 12 либо включают (э. д. с. двигателя не равна нулю), либо отключают соответствеиио корректирующие звенья 8 и // (э. д. с. двигателя равиа иулю).
Привод работает в двух режимах.
Первый р е ж и м. При работе привода ia упор (либо при разгоне со статическим моментом до момента равенства тока якоря статическому току) э. д. с. двигателя равна нулю, датчик э. д. с. 14 нодает сигнал на логические элементы 7 и 12 для отключения корректирующих звеньев 8 и 11. Сигнал задатчика И1ггенсивности 13, линейно изменяющийся во времени, подается на регулятор скорости 9, так как обратная связь но скорости отключена.
Пастройка регуляторов, тока 5 и скорости 9 во всех случаях принимается без учета внутренней обратной связи но э. д. с. двигателя 3 и объекте регулирования, а также корректирующих звеньев 8 и 1J.
Па регулятор тока 5 иодается разность двух сигналов: задающего от регулятора скорости 9 и жесткой обратиой связи по току двигателя с датчика тока 6. Регулятор тока 5 нодает сигнал на преобразователь такой формы, чтобы обеспечить оптимальное поведение якорного тока / во времени. Так как в этом случае система регулирования симметрична но отнощеиию к управляющему (f/зад) и возмущающему (/„) воздействия м то и нрн нриложеиии статического момента имеет
место также оитимальиое новедение якорного тока /.
Второй ре ж и м. При разгоие привода вхолостую (либо при приложении нагрузки)
э. д. с. двигателя ие равна нулю, датчик э. д. с. J4 подает сигналы па логические элемеиты 7 и 12 для включения корректирующих звеньев 8 н 11. На регулятор скорости 9 нодается разность двух сигналов: задающего от корректирующего звена ио унравлению // и обратной связи по скорости вращения двигателя - от датчика скорости 10. Регулятор скорости 9 нодает в контур регулирования якорного тока онтимизироваииый но возмущающему воздейетвию сигиал такой формы, чтобы обеспечивался оптимальный переходной процесс по скорости. Заданием для регулятора тока 5 является разность двух сигналов: задающего от регулятора скорости 5 и обратной связи по якорному току от корректирующего звеиа 5. В этом случае переходной процесс якорного тока аналогичен переходному ироцессу якориого тока в нервом режиме работы привода, так как новедение системы
регулирования при включеиных корректирующих звеньях и наличии внутренней обратной связи ио э. д. с. двигателя эквивалентно новедению системы регулирования без виутренней обратиой связи но э. д. с. двигателя и корректирующих звеиьев 8 и 11.
Так как при наличии внутренней обратиой связи ио э. д. с. двигателя системы регулироваиия не симметрична по уиравляющему и возмущающему воздействиям, то при приложеини статистического момента работает только одно корректирующее звено 8, которое обеспечивает онтимальиый переходной процесс якоря тока и скорости двигателя. Использование нредлагаемого способа регулировання скорости двигателя постоянного тока исключает необходимость ирименения сложного регулятора тока якоря двигателя, состоящего, как нравило, из двух усилителей ностоянного тока, а также задатчика интеисивности скорости двигателя с нелинейной характеристикой.
Предмет изобретения
Способ унравления электроприводом постоянного тока, выполненным но системе нодчиненного регулирования с последовательной коррекцией контуров регулирования тока и скорости двигателя, нутем подачи на вход регулятора тока сигиала нроизводной тока нри унравляющем и возмущающем воздействиях, отличающийся тем, что, с целью улучщения динамики -привода, дополнительно на вход регулятора скорости подают сигнал пронзводной напряжения задания и при равенстве нулю э. д. с. двигателя сигналы ироизводной тока и производной напряжения задания устраняют.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частотного управления синхронным двигателем | 1972 |
|
SU475717A1 |
| Способ регулирования уравнительногоТОКА B РЕВЕРСиВНОМ ВЕНТильНОМпРЕОбРАзОВАТЕлЕ | 1973 |
|
SU809458A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
| СПОСОБ СТАБИЛИЗАЦИИ СКОРОСТИ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1970 |
|
SU280616A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Двухдвигательный электропривод постоянного тока | 1975 |
|
SU731541A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ ТОПЛИВНОЙ АППАРАТУРЫ ТУРБОРЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 1973 |
|
SU404101A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1971 |
|
SU316591A1 |
| Устройство для двухзонного регулирования асинхронного электродвигателя | 1976 |
|
SU752721A1 |