1
Изобретение относится к двухдвнгательному электроприводу постоянного тока машин, состоящих из выдаюш,его звена и осевого наматывающего устройства для нолотнообразных материалов. Описываемый привод может быть использован в отраслях нромыщленности, производящих и обрабатывающих ткани, пленку, например, для привода шлихтовальных машин для обработки ткацких основ.
В известных приводах этого класса мащии, нанрнмер фнрмы Броун-Бовери, регулирование натяжения основы при иавиваннн на ткацкнй навой пронзводится путем регулирования мощности, нотребляемой двигателем наматывающего устройства 1.
Мощность двигателя иавоя складывается из мощности навивания и мощиости на преодоление потерь на трение. С увеличением диаиазона изменения натяжения осно-, вы при навивании увеличивается доля мощности, затрачиваемой на иреодоленне трення. Причем с изменением диаметра навивки мощность, затрачиваемая на преодоленне трення, меняется. Обычно не известны с достаточной точностью как абсолютная величина мощности потерь, так и ее изменение с изменением диаметра навивки. Поэтому не удается с достаточной точностью
ее компенсировать, что понпжает точность регулирования натяженпя и ограничивает диапазон изменения рабочих натяжений при намотке н диаиазон изменения диаметра навивки.
Паиболее близким к изобретеиию является двухдвигательиый электронривод постоянного тока, у которого момент двигателя навоя регулнруется путем регулнровання
10 по заданному закону тока якоря двигателя навоя.
Известный электропрпвод содержит двигатели иодающего и наматывающего механизмов, нодключенные параллельно к образователю: один непосредственно, а другой - через вольтодобавочный источник, датчик частоты вращения двигателя подающего механизма, через блок сравнення с заданием, нодключенный к цепи ун20 равления преобразователя, а также задатчик и датчик тока 2.
При уменьшении натяжения материала, особенно у современных машин, пмеющнх новыщенную мощность механизма навивания, момент на преодоленне нотерь быть блнзким и даже превышает полезный момент иавпвания.
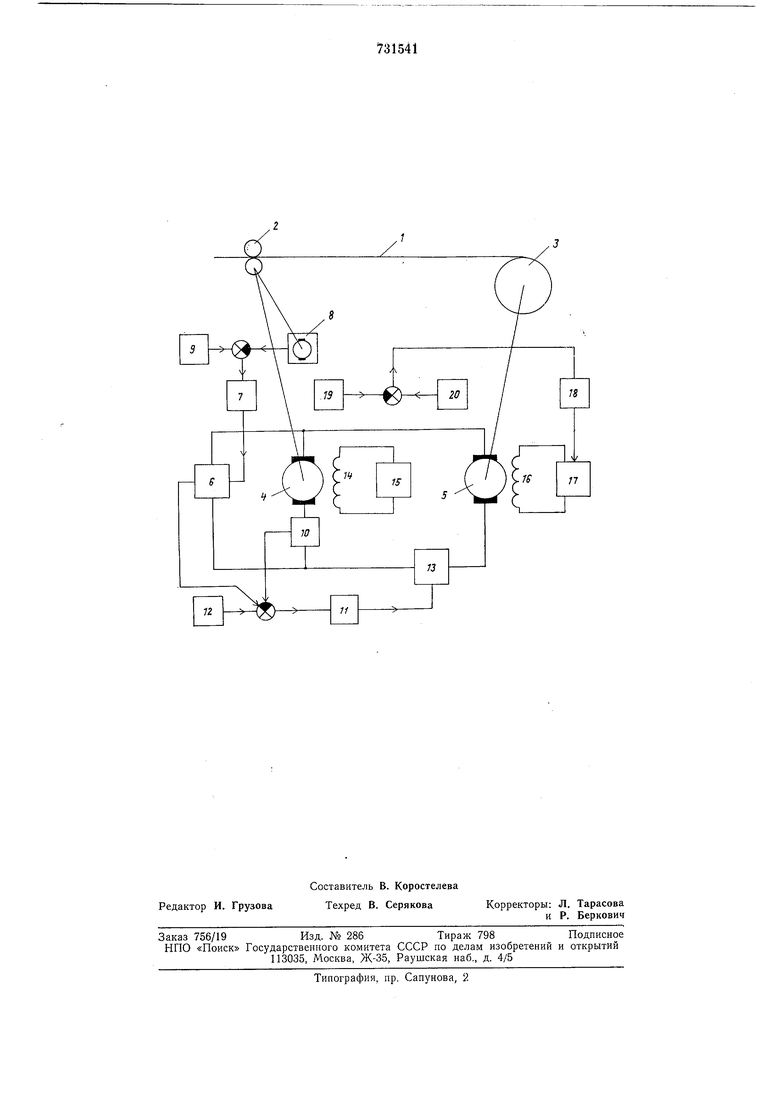
При этом закон регулирования тока двигателя для поддержания постоянного натя30 жения материала стаиовится очень , трудно воспроизводимым, а погрешность поддержания натяжения возрастает. В случае осевого наката и при наличии пресс-навоя, имеющего место в шлихтовальных машинах, закон регулирования тока двигателя навоя становится еще более неопределенным, зависящим от целого ряда факторов, не поддающихся учету, поэтому погрещность регулирования натяжения путем регулирования тока якоря двигателя навоя может достигнуть недопустимых величин. Кроме того, в схеме отсутствует автоматическое регулирование ЭДС двигателя навивающего устройства, необходимое в случае применения этой схемы для осевого наката материала, при котором двигатель навивающего устройства должен работать с переменным потоком. В этом случае ЭДС двигателей врапл,аю.щего и наматывающих звеньев должны поддерживаться равными во всем диапазоне изменения скоростей, чтобы избежать дополнительных погрешностей поддержания ПОСТОЯ.ННОГО натяжения при разгоне машины. Если при работе на минимальной скорости (2-3% от максимальной скорости мащины) окажется, что ЭДС двигателей не равны, то при разгоне машины разность ЭДС увеличивается во столько же раз, во сколько повысилась скорость (до 30-50 раз). При этом через двигатель наматывающего звена протекает дополнительный ток, вызывающий дополнительную погрешность в регулировании натяжения. Цель изобретения является расширение диапазонов регулирования натял ения и изменения диаметра навивки. Указанная цель достигается тем, что в двухдвигательный электропривод постоянного тока, содержащий двигатели подающего и наматывающего механизмов, подключенные параллельно к преобразователю: первый непосредственно, а второй - через вольтодобавочный источник, датчик частоты вращения двигателя подающего механизма, через блок сравнения с заданием, подключенный к цепи управления преобразователя, задатчик и датчик тока якоря, введены датчики ЭДС двигателей, выходы которых через блок сравнеиия соединены с регулятором возбуждения двигателя наматывающего механизма, а датчик тока включен в якорную цепь двигателя подающего механизма, причем датчик тока вместе с задатчиком тока через блок сравнения подключен к цепи управления вольтодобавочного источника. На чертеже изображена блок-схема привода. Обрабатываемый материал 1 поступает через подающее звено 2 на наматывающее звено 3. Двигатель 4 подающего звена и двигатель 5 наматывающего звена питаются от силового регулируемого преобразо510 15 20 25 30 35 40 45 50 55 СО 65 вателя 6, управляемого регулятором 7 частоты вращения, на который поступают сигналы от тахогенератора 8, кинематически соединенного с двигателем 4 и задатчиком 9 скорости. В якорную цепь двигателя 4 включен датчик 10 тока, сигнал которого поступает на регулятор 11 тока, на который также поступает сигнал от задатчика 12 тока. Регулятор И тока управляет силовым вальтодобавочным регулируемым источником 13, включенным последовательно с якорем двигателя 5. Обмотка 14 возбуждения двигателя 4 иитается постоянным напряжением от неуправляемого источника 15. Обмотка 16 возбуждения двигателя 5 питается от регулируемого источника 17, управляемого регулятором ЭДС 18, на который поступают сигналы от датчиков ЭДС 19 и 20 двигателей 4 и 5, причем датчик ЭДС 19 является задающим, а датчик ЭДС 20 выполняет роль датчика обратной связи. Поскольку ток двигателя подающего звена поддерживается постоянным с помощью регулятора 11 тока, а его обмотка возбуждепия питается от источника постоянного нерегулируемого напряжения, т. е. поток возбуждения двигателя постоянен, момент, развиваемый этим двигателем, постоянен. Скорость движения обрабатываемого материала поддерживается на заданном уровне с помои ью системы регулироваиия скорости (СРС). Подающее звено 2 находится под воздействием момента сопротивления движепия материала на входе звена, момента двигателя и момента, возникающего от натянутого материала на выходе звена. Если момент статического сопротивления движению материала и момент двигателя постоянны, то и натяжение материала на выходе подающего звепа постоянно и независимо от момента сопротивления навивающего звена, что нозволяет поддержать постоянство натяжения материала ири расширении диапазона регулирования натяжения и диаметра навивки. Момент двигателя подающего звена 2 равен MS. Ж, Же + - вы., где MC - момент статического сопротивления механизмов подающего звена; МЕХ - момент, определяемый натяжением основы на входе подающего звена; - момент, определяемый натяжением основы на выходе подающего звена. Натяжение основы на наматывающем звене 3 и натяжение основы на выходе подающего звена 2 равны между собой, поэтому для поддержания постоянства натяжения основы на наматывающем звене необходимо ноддерживать ностоянным момент Мвых. Поскольку MC и Мвх - величнны постоянные, для поддержання ностоянногоуИвых необходимо поддерживать постоянным момент , что и осуществляется в приводе с помощью системы регулирования тока (СРТ) двигателя выдающего звена. Поскольку в формулу (1) не входит момент сопротивления наматывающего звена, удается поддержать натяжение основы на наматывающем звене ностоянным, т. е. удается устранить влияние момента сопротивления наматывающего звена, являющегося сложной функцией диаметра навоя, скорости, усилия прижима нресс навоя и т. д.
Предлагаемая схема привода работоспособна при условии, если ЭДС двигателей подающего и наматывающего звеньев одинаковы. Современные датчики ЭДС увеличивают свою иогрешность с уменьшением величины ЭДС, что понижает точность регулирования ЭДС на минимальной рабочей скорости, могущей составлять 2-3% от максимальной рабочей скорости машины, а это приводит к погрешности в регулировании натяжения материала при намотке и особенно ири разгоне машины.
Поскольку погрешность датчнков ЭДС 19 и 20, обусловленная низким уровием входного сигнала, носит систематический характер, для повышения точности регулирования равенства ЭДС двух двигателей, что позволяет расшнрить диаиазон регулирования натяжения, на мащине используется два датчика ЭДС, погрешности которых частично компенснруются.
Формула изобретения
Двухдвигательный электропривод ностояниого тока для машин, обрабатываюшнх нолотнообразный материал, содержащий двнгатели подающего и наматывающего
механизмов, подключенные параллельно к преобразователю: первый неносредственно, а второй - через вольтодобавочный псточник, датчик частоты вращения двигателя подающего мехапизма, через блок сравноння с заданием, подключенный к ценн управления преобразователя, задатчик и датчик тока, о т л и ч а ю щ и и с я тем, что, с целью расширения диапазона регулирования натяжения и изменения диаметра навивки, в него введены датчики ЭДС двнгателей, выходы которых через блок сравнения соединены с регулятором возбуждения двигателя наматывающего механизма, а датчик тока включен в якорную цепь двигателя подающего механизма и вместе с задатчиком тока через блок сравнення подключе к цепи управления вольтодобавочного нсточника.
Источники информацнн,
иринятые во внимание при экспертизе
1.у втоматизироваиный электропривод текстильных машии. М., «Машиностроение, 1962.
2.Патент США № 3611079 кл. 318-7, 1971 (прототии).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ШЛИХТОВАЛЬНОЙ МАШИНЫ | 1973 |
|
SU379960A1 |
| Электропривод перемоточных машин | 1986 |
|
SU1378005A1 |
| Двухдвигательный электропривод намоточной машины | 1981 |
|
SU964944A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Многодвигательный электропривод постоянногоТОКА для пОТОчНОй лиНии C пЕРЕМАТыВАю-щиМ МЕХАНизМОМ | 1979 |
|
SU851721A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657561A1 |
| Электропривод моталки | 1980 |
|
SU955488A1 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1982 |
|
SU1043093A1 |
| Устройство управления летучими ножницами с механизмом выравнивания скоростей | 1989 |
|
SU1682058A1 |