Изобретение относится к электрооборудованию прог вышленных предприятий, а именно к системам автоматического управления электроприводами постоянного тока, питающимися от реверсивных статических преобразователей с совместным управлением выпрямительных групп, и может быть реализовано во многих отраслях промышленности для реверсивных приводов постоянного тока, управляемых по принципу последовательной коррекции. Известен способ регулирования уравнительного тока в реверсивном вентильном преобразователе, питающем электродвигатель постоянного тока, при котором на регулятор уравнительного тока вентильного преобразовател воздуйствуют по цепи отрицательной обратной связи сигналом регулируемого параметра, .измеряют производ ную ошибки по частоте вращения и, с целью уменьшения динамической составляющей уравнительного тока, дополнительно на указании регулятор воздействуют сигналом, про порциональньам указанной первой прои возной ошибки по частоте вращения 1. Недостатком такого способа регулирования динамического уравнительного тока реверсивного преобразователя является некачественный переходный процесс в определенной зоне соотношения динамических параметров якорной цепи и уравнительного контура. Ликвидация этого недостатка невозможна указанным способом, так как при включении емкости параллельно диоду сигнал регулятора уравнительного тока имеет вид (l+pTj)К и , следовательно, при изменении входных параметров (емкости и сопротивления) изменяются одновременно постоянная времени Т и коэффициент усиления К. Наиболее близким к изобретению техническим решением является способ регулирования уравнительного тока в реверсивном вентильном преобразователе, питающем двигатель постоянного тока, при котором на регулятор уравнительного тока вентильного преобразователя воздействуют по цепи отрицательной обратной связи сигналами регулируемого параметра и производной зсщанного значения тока выпрямительной группы 2. Недостатком данного способа явля ется запаздывание сигнала производной заданного значения тока выпрямительной группы при возмущающем воздейстзш- : по нагрузке,, что приводит к увеличению динамической составляющей ураБНит€1Пьного тока по сравнению в режимом управления. Цель изобретения - уменьшение ди намической составляюгдей уравнительисго тока. Указанная цель достигается тем, что дополнительно на регулятор урав ните.аьного тока воздействуют сигналом, пропорциональным первой произЕо.циоЕ напряжения на электродвигате ле постоя: ного тока. На чертэже приведена схема ревер сиЕкого вентильного преобразователя .иитающего электродвигателя пос-2тоянного тока, с двухканальной системой регулирования частоты вращени Схема содержит объект регулирова ния -- двигатель 1 постоянного тока независиг-/7ого возбуждения; контур ре гулирования тока выпрямителя (инвер тор) .. состоящий из объекта 1 регули рования преобразователей 2 и 3 с системами 4 и.5 фазового управления регуляторов 6 и 7 тока, датчиков 8 и 9 тока, задатчика 10 уравнитель ного тока, логического переключающе го устройстр.а 11 и корректирующего звена 12 с ддатчиком 13 напряжения/контур регулирования частоты вращения двигателя, состоящий из объекта 1 регулирования в виде контура регу лирования тока выпрямителя (инвертора) по поз.б, регулятора 14 часто вращения, датчика 15 частоты вращения. При управляющем воздействии сигнал от задатчика интенсивности частоты вращения двигателя Пздд программирует изменение во времени частоты вращения двигателя и направление протекания сигнала от корректирующего звена 12, например,при усло ном ходе вперед к регулятору 7 тока, при ходе назад - к регулятору б т ок а. Точная передаточная функция корректирующего звена 12 равна обратной передаточной функции тракта регулято тока - тиристорный преобразователь ,,P,;,T PIllil.JiL, „, Р Т,, -t- Чк э где Тр - малая постоянная времени токового контура; - постоянная времени якорной цепи; m - соотношение эквивалентных постоянных времени контуров регулирования частоты вращения и тока двигателя; К - коэффициент усилия датчика . тока; R-J - сопротивление якорной цепи двигателя. Реализация звена 12 не представляется возможной, поэтому в реальных установках предполагается использование звена с приближенной передаточной функцией ;(. .Jil. (2) -pTj-ЦРЭ где Тд Т + Tj. Первый режим работы привода. При работе привода вперед на вход регулятора б тока выпрямителя подается алгебраическая сумма трех сигналов: задания тока выпрямителя с выхода регулятора 14 частоты вращения, задания уравнительного тока и отрицательной обратной связи по току выпрямителя с затчика 8 тока. Регулятор б тока подает сигнал на преобразователь такой , чтобы обеспечить оптимальное повередние тока выпрямителя во времени. Переходные функции тока выпрямителя и ЭДС двигателя при заданных параметрах якорной цепи и уравнительного контура определяют поведение , якорного напряжения двигателя, являющегося возмущением в контуре регулирования уравнительного тока. Для компенсации этого возмущения, т.е. для ликвидации броска динамического уравнительного тока, необходимо на вход регулятора 7 тока (регулятор уравнительного тока) ввести сигнал, пропорциональный напряжению якоря двигателя, через корректирующее звено 12, передаточная функция которого равна обратной передаточной функции тракта регулятора 7 тока - преобразователь 3. При положительном сигнале Дп на входе регулятора 14 частоты вращения (или п зад ) логическое переключающее устройство 11 срабатывает и сигнал отрицательной обратной связи с корректирующего звена 12 подается на вход регулятора 7 тока.Кроме того на регулятор 7 тока подаются сигнал с задания уравнительного тока и сигнал отрицательной обратной связи по уравнительному току с датчика 9 тока. . Рег лятор тока подает на преобразователь 3 такой сигнал, чтобы обеспечить равенство нулю динамического уравнительного, т.е. напряжение преобразователя 3 будет повторять во времени якорное напряжение двигателя и будет отличаться от него не величину падения напряжения в цепи инвертора от статической составляющей уравнительного тока. Второй режим работы привода. При работе привода назад на вход регулятора 7 тока инвертора подается
алгебраическая сумма трех сигналов, задания тока инвертора с выхода регулятора 14 частоты вращения, згшания уравнительного тока и отрицательной обратной связи по току инвертора с датчика 9 тока.
4 егулятор 7 тока подает на преобразователь 3 такой формы сигнал, чтобы обеспечить оптимальное поведение тока инвертора во времени.
Для компенсации возмущения в виде якорного напряжения, т.е. для ликвидации броска динамического уравнителного тока, необходимо на вход регулятора 6 тока (регулятор уравнительного тока) ввести сигнал с датчика 13 напряжения через корректирующее звено 12.
При отрицательном сигнале Ап логическое переключающее устройство 11 срабатывает и сигнал отрицательной обратной связи с корректирующего звена 12 подается на вход регулятора 6 тока. Кроме того, на регулятор 6 ток подаются сигналы задания уравнительного тока и отрицательной обратной связи по уравнительному току с датчика 8 тока. Поведение напряжения преобразователя 3 аналогично поведению напряжения преобразователя 2 в первом режиме работы привода.
Использование Предлагаемого способа регулирования уравнительного тока в реверсивном вентильном преобразователе позволяет уменьшить потери электропривода, увеличить коэффициент мощности установки, так как уравнительный ток является реактивным, а также повысить производительность привода путем уменьшения времени нарастания якорного тока двигателя постоянного тока.
Формула изобретения
Способ регулирования ур авнительного тока в реверсивном вентильном преобразователе, питающем двигатель постоянного тока, при котором на регулятор уравнительного тока вентильного преобразователя воздействуют по цепи отрицательной обратной связи сигналом регулируемого
5 параметра и измеряют первую производную напряжения на электродвигателе постоянного тока, отличающийся тем, что, с целью уменьшения динамической составляющей уравни0тельного тока, дополнительно на указанный регулятор воздействую сигналом, пропорциональным производной напряжения.
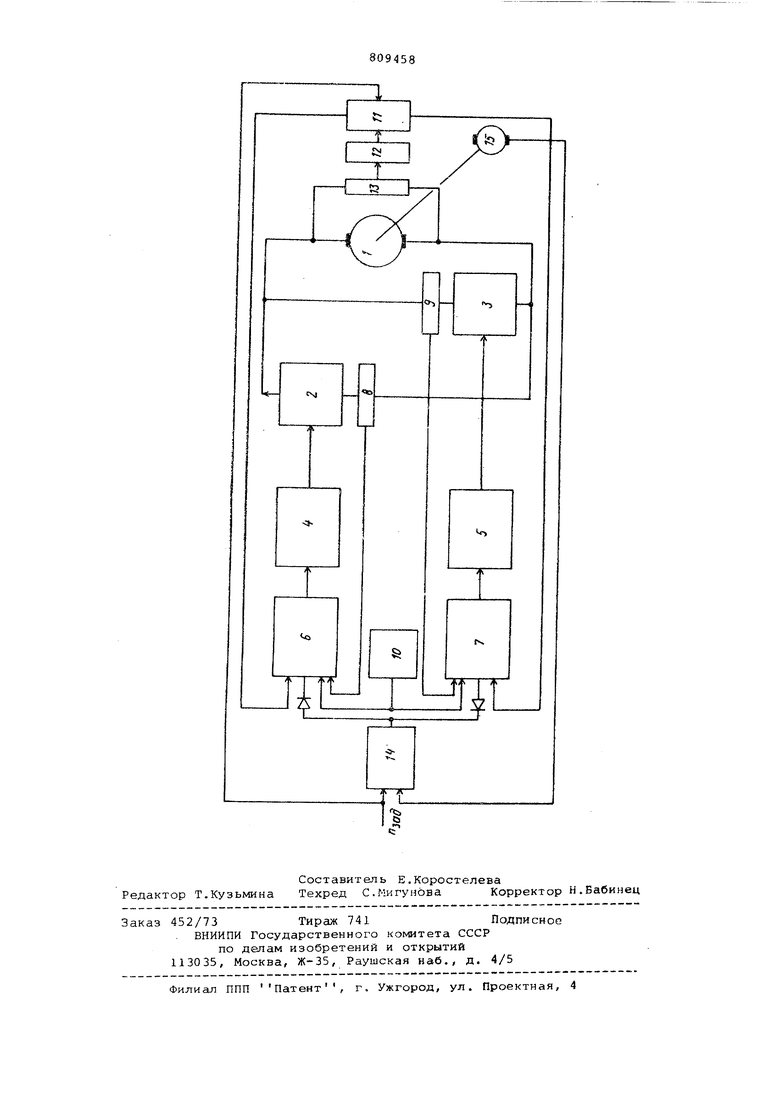
Источники информации, принятые во внимание при экспертизе .
5
1.Штельман Е. и др. Вопросы динамики уравнительного тока в двухканальной системе подчиненного регулирования. Инструктивные указания
по проектированию электротехнических
0 промышленных установок ГПИ Тяжпромэлектропроект, - Энергия, 1970, № 9 .
2.Авторское свидетельство СССР № 299927, кл. Н 02 Р 5/06, 1971
5 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивнымВЕНТильНыМ пРЕОбРАзОВАТЕлЕМ | 1977 |
|
SU809465A2 |
| Электропривод постоянного тока | 1977 |
|
SU681528A1 |
| Реверсивный тиристорный электропривод постоянного тока | 1980 |
|
SU951614A1 |
| Устройство для управления реверсивным вентильным электродвигателем | 1982 |
|
SU1064412A2 |
| Устройство регулирования тока | 1986 |
|
SU1332283A2 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Реверсивный вентильный электропривод постоянного тока | 1970 |
|
SU650191A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |