1
Изобретение относится к средствам механизации и автоматизации технологических процессов и может быть примеиеио в качестве самостоятельного привода небольшой мощности (от долей до нескольких единиц ватт), а также как ирограммиое устройство в системах автоматизации и телемеханики.
Для ряда процессов производства, особепно с относительно большим временем рабочего цикла и расстояниями, на которые перемешаются детали, например naneceinie различных покрытий на шлейфы пли платы в радиотехиическоп промышленности с последующей выдержкой ири определенной температуре и др. операциями, требуется привод с небольшими усилиями перемеи1,еиия иа достаточно большое расстояние ири значительном (в десятки раз) изменении скорости ДБИжеиия.
Известен гидравлический привод, содеря а1ций ириводное устройство, соединенное натрубком, в котором установлен дроссель, с узлом унравления рабочим циклом.
Одиако известные гидравлические приводы имеют сложную конструкцию и иедоста1очную точность работы.
В известных нриводахсложиа систе.ма регулирования для выдерживания нужного закона движения, особенно при малых потребных усилиях; кроме того, возникают дополннтельпые трудности ири изготовленш нплнндров с увеличенным ходо.м поршня, а также нри эксплуатации в связи с наличием уплотнений движущихся штока и иоршня.
Из механическнх нриводов с наиболее нростым обеспеченнем нужного закона неремеще1И Я кулачковый механизм нмеет малый ход поступательно движущихся элементов, а при небольшой скорости их к электродвигателю требуется редуктор с большим передаточным отношением. Все это затрудняет механнзацию нодобных производственных нроцессов.
Целью изобретения яв.тяется унроще1Н1с конструкции и повышение точности работы.
Для этого нриводное устройство вынолнено в виде поплавка, размешеппого в жидкостной ка.мере с нрофилированными стенками и боковыми натрубкамн.
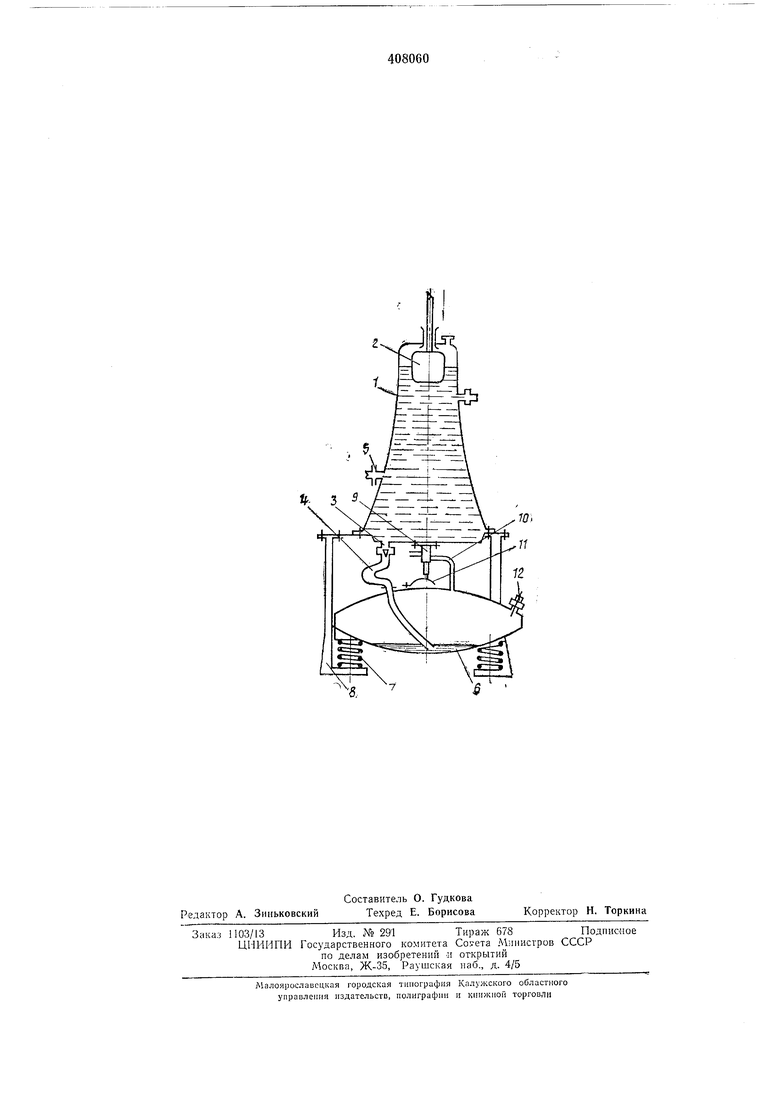
Такой привод, наряду с конструкти1 Н()и нростотой, обладает свойством саморегулирования, что позволяет отказаться от снециалыюй системы регулирования рабочего хода. На чертеже приведеиа схема конструкции привода.
Гидравлический нрнвод содержит камер 1 с рабочей жидкостью (вода, антифриз и т. п.) и ведущее звеио-нонлавок 2 со штоко.м нлн гнбкнм тросиком, иередаюнднм усилие нривода на нагрузку. Камера 1 нмеет нижПИЙ выходной патрубок с дросселем 5, с которым соедппеп гпбкий шланг 4 для слпва жндкости из камеры, а также дополпительпые боковые патрубкп 5. Боковые стенки (или степки в случае осевой симметрии) профилируют в соответствии с задаваемым законом движения ведущего звеиа. .
Узел управлеиия рабочим циклом содержит приемпую емкость 6, опирающуюся через пружину 7 па основание опоры 5 привода. Патрубок, пепосредствеиио соедппеииый с гибким щлапгом 4, сообщает камеру / с придоиной частью емкости 6.
С источииком эиергии - магистралью сжатого газа, используемого в дашюй конструкции привода для вытеснения рабочей жидкости в камеру, приемная емкость сообщается через золотник 9 при помощи гибкого шлаига 10. Вертикальпые перемещения емкости 6 передаются золотнику 9 при иомощи специальной пластничатой пружины 11.
Емкость 6 снабжена стандартным нредохраиительным клапаном 12.
Крайние (верхнее и нижнее) ноложепия поплавка 2 обеспечиваются соответствующими упорами крышки и дна камеры /. В случае необходимости вертикальное перемещепне ведущего звена-поплавка 2 при помощи соедппенпого с иим тросика или штока (например применением роликов, вращающегося барабана или реечного зацепления для штока) легко преобразуется как в поступательное движение иного направления, так п вращательное.
Время рабочего хода, соответствующего перемещепию поплавка 2 от крайних верхнего к нижнему положению его устанавливается дросселем 3.
В процессе истечения жидкости из камеры / под действием силы тяжести создается усилие от поплавка, направлеппое вертнкально вниз и равиое нескомпенсированиой (выталкивающей силой жидкости) части его веса.
При этом происходит процесс автоматического регулирования движеиия. При случайном возрастаиии сопротивления текущему усилию поплавка и, в связи с этим, увеличивающемся отставанием поплавка от опускающегося уровня жидкости в камере / появляется дополиительная, неуравновешенная вытесняющей силой жидкости, сила тяжести, которая приводит к автоматическому выравмивапию скорости поплавка и уровпя жидкости. Подобиым образом саморегулируется процесс движепия и при случайпом у.меньшеиии нагрузки.
5 В случае значительной «ступенчатости задаваемого закона движения привода (т. е. резких измеиеиий скоростей в период рабочего хода) целесообразно иснользовать боковые патрубки 5 камеры /. При значительном
10 увеличении скорости пере.мещения поплавка 2 патрубки 5 соедиияются гибкими шлаигами иепосредствеино с приемной емкостью 6. При иеобходимости резкого замедления хода целесообразно использовать дополнительные
5 сосуды (не ноказаны), выходные отверстия которых соедиияются с этими патрубками 5. В этом случае жидкость даппого дополнительного сосуда, сообщаясь с основной камерой /, увеличивает объем вытекающей жидкости п,
0 следовательно, замедляет падение уровня и скорость движения поплавка на соответствующем участке хода. Кроме того, подключение донолиительных сосудов к нижнему выходному иатрубку может облегчить переналадку
5 нривода на новую программу рабочего движепия.
Гидравлический привод работает следующим образом.
По мере заполнения жидкостью из камеры
0 / приемной емкости 6 последняя, перемещаясь вертикально вниз, при помощи пружины 11 перемещает золотник 9. При полном ходе емкости 6, соответствующем полиому ходу ионлавка, золотник перемещается, сообщая емкость с магистралью сжатого газа. В этот момеит происходит резкое отжатие относительно нежесткой пружины 11, при этом сжатый газ через гпбкий шланг 10 поступает в приемную емкость 6 и пачинается процесс вытеснения газом жидкости из иее в камеру /.
Предмет и з о б р е т е in-i я
Гидравлический привод, содержащий при5 водное устройство, соедииенное патрубком, в котором установлен дроссель, с узлом управлеиия рабочим циклом, отличающийся тем, что, с целью упрощепия копструкции и повышения точности работы, приводное устройство выполнено в виде поплавка, размещеииого в жидкостиой камере с профилированными стен1{ами и боковыми патрубками.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР ЭЛЕКТРИЧЕСКОГО РЕЖИМА ЭЛЕКТРОДУГОВЫХ ПЕЧЕЙ | 1972 |
|
SU331506A1 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ БЛОК | 1972 |
|
SU348777A1 |
| Манометр | 1980 |
|
SU900138A1 |
| ЕХ.ЛИИЧЕСКОЕ ШАГОВОЕ ЦИФРОВОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО | 1970 |
|
SU271618A1 |
| ИСПО.[!11ИТГ-.ПЬНЫЙ МЕХАНИЗМ СУДОВОГО ВИНТА Р t ГУЛ и РУ ЕМО ГО 1П А ГА?»:-гО'>&К'>&зНр>&<-^^^^^:т^^^^'^'>&^\,i^j''^^-. | 1973 |
|
SU377267A1 |
| КОМБИНИРОВАННЫЙ РЕГУЛЯТОР УРОВНЯ ЖИДКОСТИ И ДАВЛЕНИЯ ДЛЯ СЕПАРАТОРОВ ДВУХ ФАЗ | 1989 |
|
RU2032204C1 |
| ПЛЮВИОГРАФ | 1991 |
|
RU2034316C1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК КОРОБОК В ЯЩИК | 1965 |
|
SU169444A1 |
| Устройство для распыления | 1979 |
|
SU784935A1 |
| Пневмогидравлический двигатель | 1990 |
|
SU1813914A1 |