1
Изобретение относится к области весоизмерительной техники, в частности к устройствам для определения характеристик моделей в аэродинамических трубах.
Известны аэродинамические многокомлонентные в утримодельные весы, содержащие упругие элементы, связанные с поршнем для установки модели, датчики угловых перемещений, .храповой механизм, кривошип, тросовый привод и держатель.
Однако эти весы не обеспечивают требуемой тоЧНости измерения.
В предложенных весах кривошип выполнен в виде двух параллельно расположенных и жестко скрепленных шарнирами упругих кольцевых элементов, между которыми расположен храповой механизм осевого перемещения модачи относительно кривошипа.
Благодаря этому повышается точность весов.
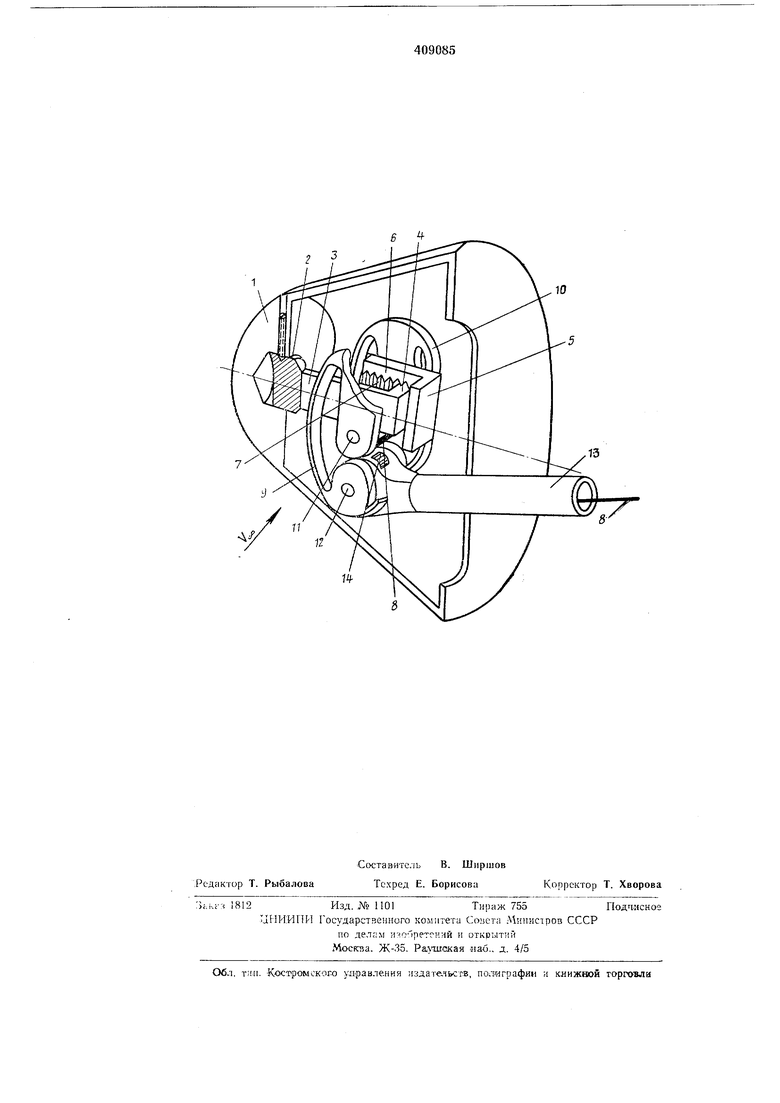
Иа чертеже показаны описываемые весы.
Модель / установлена на направляющем поршне 2 упругих элементов 3. Основание 4 упругих элементов размещено во втулке 5. Зубчатая рей.ка 5 расположена на втулке 5, храновик 7 - на основании 4. К основанию упругих элементов прикреплен трос 8, служащий приводом храпового механизма. Втулка шарнирПо соединена кривошипом, состоящим из двух параллельно располженных кольцевых
элементов 9 и 10, жестко скрепленных между собой осями шарниров // и 12. Другим своим концом кривошип шарнирно закреплен на держателе 3, через который пропущен трос 8. На шарнирах П и 12 установлены датчики 14 угловых перемещений.
Весы работают следующим образом.
Перед проведением измерений дерх атель закрепляют в подвеске рабочей части аэродинамической трубы, храповик устанавливают в зацепление с крайним правым зубом рейки и па направляющем поршне крепят модель. После запуска трубы модель под де11ствием аэродинамических сил устанавливается в попотаке иод определенным балансировочным углом атаки а так, что оси шарниров располагаются по линии действия проекции результирующей аэродинамическо силы па плоскость вращения кольцевых элементов, выполняющих в устройстве роль кривошипа. Влияние силы тяжести модели па положение кривошипа парируется строго горизонтальной установкой перед экспериментом плоскости вращения кривошила. При помощи датчика угловых перемещений, установленных на шарнирах, регистрируют балансировочный угол атаки as (угол между вектором скорости f/cc. и осью модели) и угол между лииией осей шарниров и вектором скорости Uх, тангенс которого равен величи.не аэродинамического качества, Одно.временно регистрируют показания датчиков кольцевых упругих эдементов, измеряющих проекцию результирующей силы на плоскость вращения «ривоЩйиз. Положение центра давления определяют как точку пересечения продольной осислинией, соединяющей оси шарниров, зная расстояние между осью шарнира // и осью модели. Величины момента рысканья Мп , боковой силы Рв и осевого момента М-. определяют по показаниям датчиков упругих элементов 3 в условиях отсутствия на них влияния комггонентов Р - , Р п и Me , воспринимаемых кольцевыми элементами.
Вредное влияние компонентов Мп , Рч и М . на показания датчиков кольцевых упругих элементов в описываемых весах практически сводится к иулю по следующим причинам. Во-первых, выполнение кривошипа из двух разнесенных кольцевых элементо1В существенно увеличивает его жесткость по отношению к измеряемым компонентаNJ, и, вовторых, действия боковой силы Ре максимально приближена к геометрическим центрам кольцевых упругих элементов. Таким образом, даже при действии больших боковых сил и моментов точность измерения Рп , Р -. 1 М f продолжает оставаться высокой. Кроме того, при действии па модель большого осевого момента М- его величину можцо onределить по разности показаний датчиков параллельно расположенных кольцевых элемеитов // и 12, зная расстояние между последними.
Для изменения угла атаки модели в ироцессе эксперимента при помощи троса 8 перемеп|.ают основание 4 упругих элементов 5 во втулке 5 вплоть до зацепления храповика 7 с рейкой 6 на следующем зубе. Положение модели относительно кривошипа в результате этого изменяется и последний поворачивается так, чтобы линия действия результнрующе; аэродинамической силы в плоскости изменения угла атаки (в плоскости вращения jvprBoшипа) совпала с линией, соединяющей оси щаряир.ов 11 и 12.
После снятия показаний датчиков унругих эл,ем,елтов 5, ;5, 10 и датчиков 14 угловых перемещений Луществляют олИсайным выше способом зацепление храповика 7 со следующим. зубоМ рейки б, исследуя таким образом весь долускаемый конструкцией устройства диапазон углов атаки (порядка 60-70°).
Как видно, при изменении в процессе эксперимента положения основаяия 4 упругих элементов 3 относительно втулки 6 расстояние между осями У/ и модели остается неизменным, что также позволяет, наряду с расположением храпового механизма с основанием 4 упругих элементов 3 между кольцевыми элементами 9 и 10, уменьшить габариты весов.
Сила иатяжеиня Tipoca 8, служащего для управления храповым механизмом в процессе эксперимента, складывается из суммы величины проекции результирующей аэродинамической силы на плоскость вращения кривошипа и силы треиия, которая невелика в условиях вНбрации .конструкции в потоке трубы. Трос 8 выводится по направляющим ролика-м за стенку трубы и соединяется, например, с сердечником магнита.
Предмет изобретения
Аэродинамические многокомпонентные внутримодельные весы, содержащие упругие элементы, связанные с поршнем для установки модели, датчики угловых перемещений, храповой механизм, кривошип, тросовый привод и держатель, отличающиеся тем, что, с целью повышения точности, в -них кривошип выполнен в виде двух параллельно рааположеиных и жестко скрепленных шарнирами упругих кольцевых элементов, между которыми расположен храповой механизм осевого перемещения модели отиосите;|ьно кривоиииш.
6
10
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИМОДЕЛЬНЫЕ ВЕСЫ | 1973 |
|
SU393605A1 |
| Устройство для испытаний моделей летательных аппаратов в аэродинамических трубах | 2017 |
|
RU2685576C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЙ МОДЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 2013 |
|
RU2539763C1 |
| Аэродинамические тензометрические весы | 1983 |
|
SU1099108A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРАЩАТЕЛЬНЫХ И НЕСТАЦИОНАРНЫХ ПРОИЗВОДНЫХ КОЭФФИЦИЕНТОВ ПРОДОЛЬНЫХ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ МЕТОДОМ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2358254C1 |
| АЭРОДИНАМИЧЕСКИЕ ВЕСЫ | 1972 |
|
SU422984A1 |
| ВОДНЫЙ ВЕЛОСИПЕД | 2014 |
|
RU2569453C1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСКИ ПОЛЫХ УПРУГО-ДИНАМИЧЕСКИ-ПОДОБНЫХ МОДЕЛЕЙ КРЫЛАТЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В АЭРОДИНАМИЧЕСКИХ ТРУБАХ | 1972 |
|
SU1840314A1 |
| Устройство для определения аэродинамического качества летательного аппарата | 1972 |
|
SU498525A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ АЭРОДИНАМИЧЕСКИХ СИЛ И МОМЕНТОВ ПРИ УСТАНОВИВШЕМСЯ ВРАЩЕНИИ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2477460C1 |