ставить как сумму рысканий с небольшими углами при больших частотах свободных колебаиий и углами, создаваемыми асимметрией гондолы, асимметрией закрепления буксировочного кабеля и др. Если иервая группа ошибок, имею1цих симметричный характер, может быть учтена осреднением или фильтрацией, то вторую групну ошибок, величины которых имеют индивидуальный характер и зависят от скорости движения, учесть невозможно. Вторая группа ошибок может достигать значительной величины, измеряемой градусами.
Аналогичным образом всякого рода угловые отклонения диаметральной плоскости корабля от курса также не поддаются учету и будут давать дополнительные погрешности, если исходить из предположения, что диаметральные плоскости гондолы и корабля совпадают.
Исключить влияние перечислеиных ошибок можно измерением направлений магнитного и географического меридиана от одной базы, т. е. размепдая в буксируемой гондоле гирокомпас и магнитный компас, разность между показаниями которых и дает непосредственно магнитное склонение.
Указатели направления магнитного меридиана, например феррозондовый, работающий как нуль-индикатор, могут обеспечить измерение направления магнитного меридиана с точностями не хуже, чем 10-20. При этом система работает автономно и не требует корректировок при длительных буксировках.
Вторая часть измерительного тракта - гирокомпас, измеряющий направление географического меридиана, особенно при длительных буксировках в условиях автономности, может создавать погрешности, достигающие нескольких градусов.
Целью изобретения является исключение влияния на результаты измерения собственной намагниченности корабля и методических ошибок, связанных с относительным перемещением диаметральной плоскости корабля и гондолы.
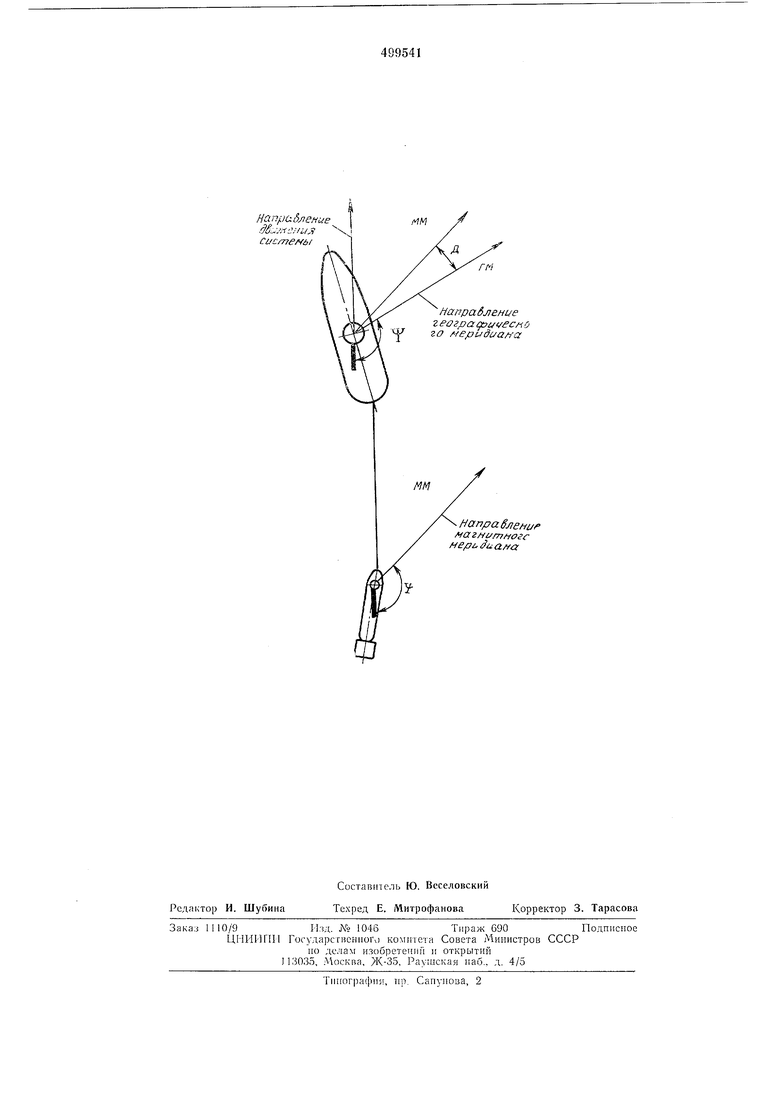
Это достигается тем, что по нредлагаемому способу за единую базу отсчета углов магинтного курса гондолы и направления географического меридиаиа на корабле принимают направление относительной скорости движения системы корабль-буксир-гондола.
Сущность предлагаемого способа иллюстрируется чертежом.
Магнитное склонение в этом случае определяется
Z cp-,
где ф - угол между направлением магнитного меридиана и направлением вектора относительной скорости движения системы корабль-буксир-гондола;
ф - угол между направлением географического меридиана и направлением вектора относительной скорости движения системы корабль-буксир- гондола-.
Для определения направления вектора относительной скорости движения системы корабль-буксир-гондола на корабле и гондоле возможно использование простейших устройств тина флюгеров.
Отсчет магнитного курса в гондоле и курса движения системы в географической системе координат на корабле производится от строго иараллельных баз.
Фор м у л а изобретения
Способ измерения магнитного склонения в море, основанный на измерении направления географического меридиана на магнитном судне и направления магнитного меридиана в
буксируемой немагнитной гондоле, о тли ч аю HI и и с я тем, что, с целью увеличения точности измерений, измеряют направление относительной скорости движения системы корабль--буксир-гондола, которое нринимают
за единую базу отсчета.
Напрабмение zeozfla/fjuvecf o Ч- го Mepudi/a/7a
HanpaejiGHuf / az/ifjfTjfiosc Hep Jt affo:
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНОГО СКЛОНЕНИЯ НА МОРЕ | 1990 |
|
RU2069876C1 |
| Способ измерения магнитного склонения и устройство для его осуществления | 1986 |
|
SU1343372A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ГЕОГРАФИЧЕСКИЙ СЕВЕР С ИСПОЛЬЗОВАНИЕМ МОЛЕКУЛЯРНО-ЭЛЕКТРОННОГО ДАТЧИКА УГЛОВЫХ СКОРОСТЕЙ И ДАТЧИКА УГЛА НАКЛОНА | 2014 |
|
RU2578049C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| НАЗЕМНЫЙ ГРАВИМЕТРИЧЕСКИЙ ДАТЧИК ИСТИННЫХ АЗИМУТОВ И УГЛОВ ОТКЛОНЕНИЯ ЕГО СИСТЕМЫ КООРДИНАТ ОТНОСИТЕЛЬНО ВЕКТОРА СИЛЫ ТЯЖЕСТИ | 2004 |
|
RU2260176C1 |
| АВТОНОМНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА КОРАБЛЯ НА АКВАТОРИИ БАЗЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2356013C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |