1
Преобразойатель относится к электродным устройсттнам, применяемым, в автоматике и телемеханике, а именно к лреобразователям частоты следо1вани-я импульсов в напяржение постоянного тока.
Известен лреабразователь частота-напряжение, содержащий широтио-иадпульсный модулятор, усилитель мощности, интегрирующий электродвигатель, реду1кт0|р, генератор управляемой частоты, кольцевой потенциометр и эталонный источН-ик напряжения.
Цель изобретения - расширение диапазона преобразуемых частот. Для этого выход широтно-имлульснОГо модулятора через усилитель мощности подключен к интегрирующему электродвигателю, механически соединенному через редуктор с генератором управляемой частоты, выход которого подключен к входу широтно-иадпульоного модулятора, а второй выход редуктора соединен с кольцевым потенциометрО М, подключенным к эталонному источнику напряжения.
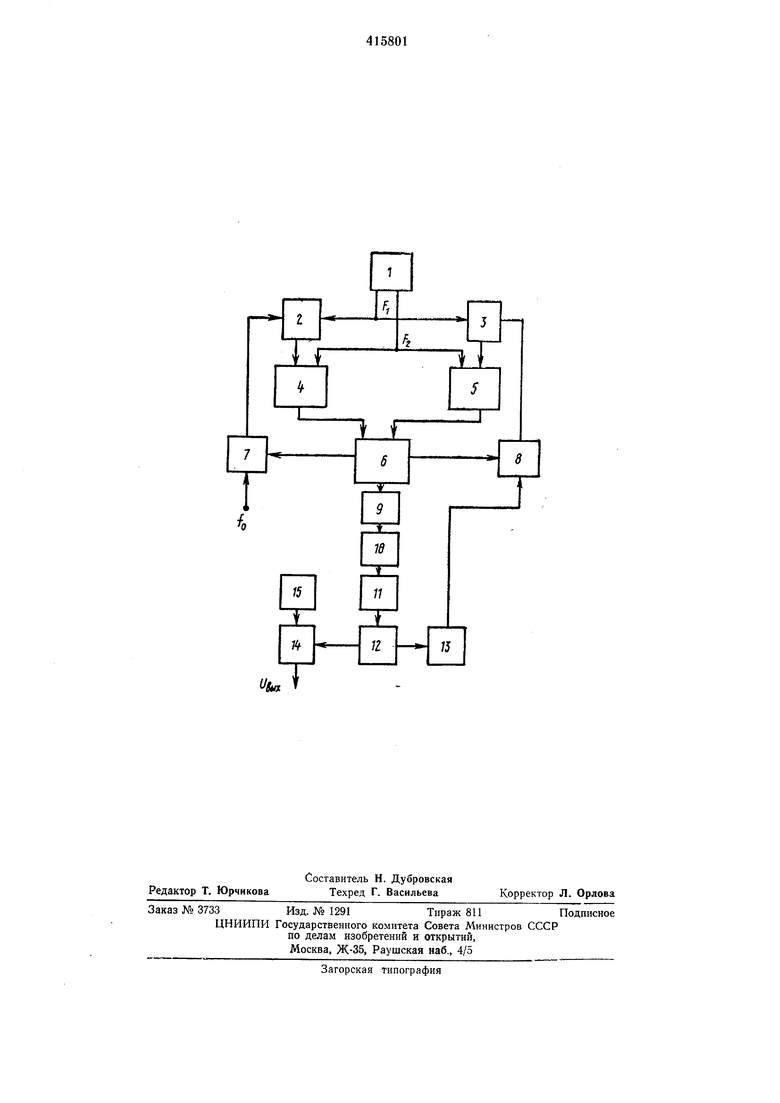
На чертеже показана функциональная бло К-схема преобразователя частота-напряжение.
Преобразователь содержит генератор /, вырабаты1вающий однополярные импульсы тактовых частот FI и FZ, сдвинутых между собой во В|ремен1И на одинаковые интервалы; схемы 2 и 5 оинх1ронизаци«, которые совместно с логическими схема1ми «И 4 & 5 защчщают преобразователь от сбоев и потери информация; нереверсивные триггерные счетчики б и 7, выполняющие роль интегрирующего
устройства; схему 8 управления и защиты, обеспечивающую защиту выходного триггера 9 управления от ipeBepca при больщих или длительных рассогласованиях, преобразующего .совместно со счетчиками б и 7 входную
частоту fo и частоту обратной связи f. в широтно-им.пульсно модулированные колебания; и усилитель 10 мощности, включающий сглаживающий фильтр, корректирующ,ий контур и собственно усилитель мощности для усиления
выходного напряжения (среднего значения) триггера 9.
Кроме того, в преобразователь входят интегрирующий электродвигатель // - исполнительный элемент системы; редуктор 12, обеспечивающий необходимый передаточный коэффициент .между валом электродвигателя 11, генератором 13 управляемой частоты, преобразующим угловое перемещение выходного вала редуктора 12 в частоту обратной связи /д. , и линейным кольцевым потенциометром 14, преобразующим угловое перемещение выходного вала редуктора 12 в напряжение постоянного тока; и стабилизироваиный источник 15 питания потенциометра 14.
Принцип работы преобразователя частотанапряжение заключается в следующем.
При подаче иа вход преобразователя напряжения частоты fo начинает изменяться оЕваж1НОСть 1выходного Импульсного напряжения триггера 9 и, следовательно, среднее значение этого «алряжения отлично от нуля. Усиленпое по мощности оно прикладывается к электродвигателю 11 с малым моментом треНИя « высокой чувствительностью. Учитывая интегрирующие свойства широтно-яАгпульсного модулятора, .напряжение рассогласования на входе электродвигателя существует до тех пор, пака частота обратной связи / не станет раиной преобразуемой /о. При этом скважность 1выходного импульсного напряжения триггера 9 становится равной единице, а среднее значение - иулю. Учитывая механиче|С1кую связь электродяигателя с потенциометром 14, движок последнего поворачивается на угол, пропорциональный величине преобразуемой частоты fo, так как характеристика преобразования широтно-импульсного модулятора линейна. Следовательно, выходное напряжение потенциомет1ра пропорционально преобразуемой частоте /о.
Диапазон преобразуемых частот опрелеляегся частотными овойсгоами логических элементов, из которых выполнен широтно-И1Мпульсный модулятор, и диапазоном плавного перекрытия частот генератором 13.
Статическая точность преобразователя определяется методической и инструментальной ощибками. Методическая ошибка в статическом реж1име равна нулю, TaiK как в контуре преобразователя используются два интегрирующих звена. Величина и знак инструментальной ощибки зависят от напряжения трогания электродвигателя, стабильности и точности ра.боты генератора 13, линейности хара1ктеристи1ки потенциометра 14 и стабильности источеика 15 питания.
, Следовательно, установившаяся инструментальная ошибка определяется суММой вышеперечисленных частных ошибок отдельных элементов системы.
При использовании соответствующих элементов с высокостабильными характеристиками статическая точность преобразователя, определяемая инструментальной ошибкой, может достигать 0,2%.
Динамическая точность преобразователя определяется значения-ми постоянных, времени отдельных звеньев, их передаточными коэффициентами, а также дискретностью преобразования. Учитывая постоянное запаздывание, вносимое широтно-вмпульсным модулятором, постоянные времени фильтра и электродвигателя, динамическая точность преобразователя сравнительно невысока и для 20% изменения частоты в середине диапазона составляет по1рядка 3-5%.
Следовательно, преобразователь может использоваться в тех устройствах, где нет жестких требований динамической точности, или в схемах, где из1менение преобразуемой частоты происходит монотонно.
Наличие двух интегрирующих звеньев в контуре преобразователя предъявляет определенные требования к обеспечению устойчивости и получению заданных показателей качества переходных процессов. Это достигается
применением корректирующего контура и расчетом общего передаточного коэффициента устройства.
Предмет изобретения
Преобразователь частота-напряжение, содержащий щиротно-импульсный модулятор, усилитель мощности, интегрирующий электродвигатель, редуктор, генератор управляемой частоты, кольцевой потенциометр и эталонный источник напряжения, отличающийся тем, что, с целью расширения диапазона преобразуемых частот, выход широтно-импульспого модулятора через усилитель мощности подключен к интегрирующему электродвигателю, механически соединенному через редуктор с генератором управляемой частоты, выход которого подключен к входу широтно-импульсного модулятора, а второй выход редуктора соединен с кольцевым потенциометром, подключенным к эталонному источнику напряж ения.