1
Изобретение относится к самонастраивающимся системам автоматического регулирования. Оно может быть применено для отыскания экстремума многомерных систем регулирования, входными величинами которых являются углы поворота или напряжения. В частности, это устройство может быть использовано для подбора оптимального распределения магпитного поля вдоль магнитной периодической фокусирующей системы лампы бегущей волны (ЛБВ).
Известны многомерные релейные системы экстремального регулирования с независимым поиском, содержащие объект регулирования, измеритель производной выходной величины объекта (регулируемой величины), логическое устройство, генератор поисковых колебаний, переключающее устройство (коммутатор) и интеграторы.
Однако при большом числе регулирующих воздействий переключающее устройство обычно выполнено на электромагнитных реле, что снижает надежность устройства. Если переключающее устройство выполнено на бесконтактных элементах, оно сложно и громоздко.
Целью изобретения является упрощение многомерной системы экстремального регулирования с независимым поиском.
Эта цель достигается в результате совмещения функций логического элемента, генератора поисковых колебании, коммутатора и интеграторов в одном устройстве, содержащем бесконечный ремень, охватывающий ряд гикивов, связанных с входными валами объекта регулирования, и ведущий шкив, связанный с валом двигателя, вход которого подключен к измерителю производной регулируемой величины и устройству реверса, имеющему электрическую связь с копечными выключателями и прпводным двигателем передачи «ходовой винт-гайка. На ходовой гайке расположен прижимной рол1п ременной передачи, установлепиой па входе объекта регулирования.
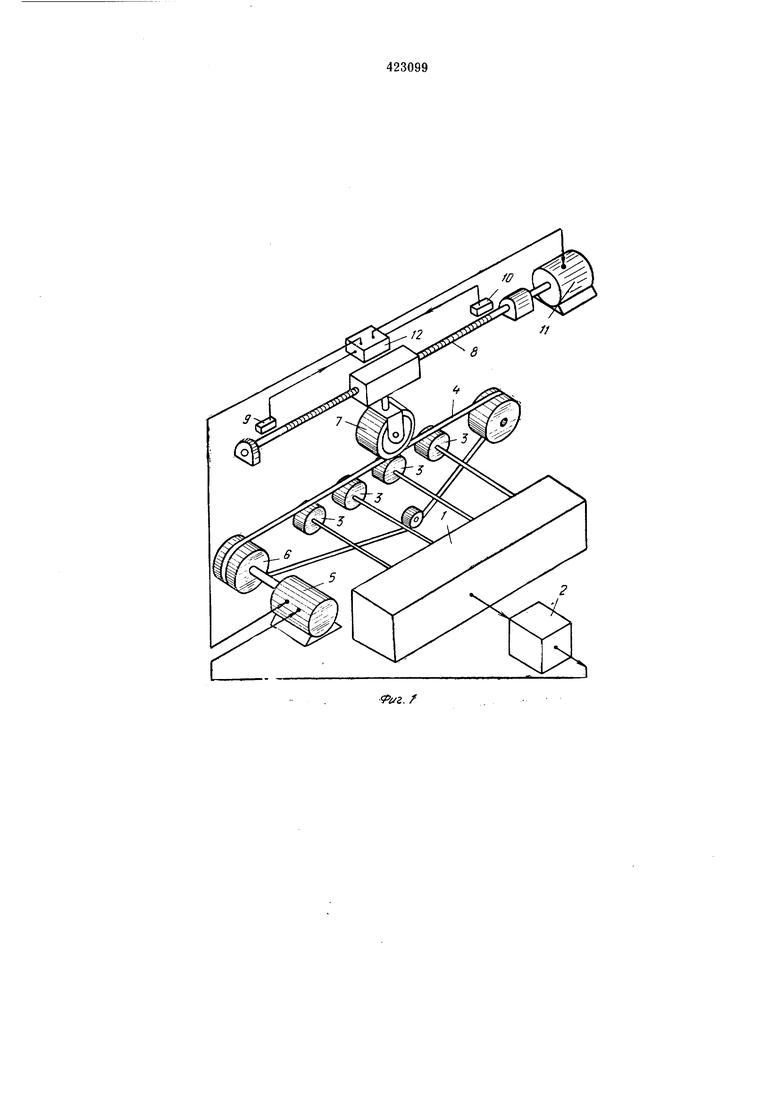
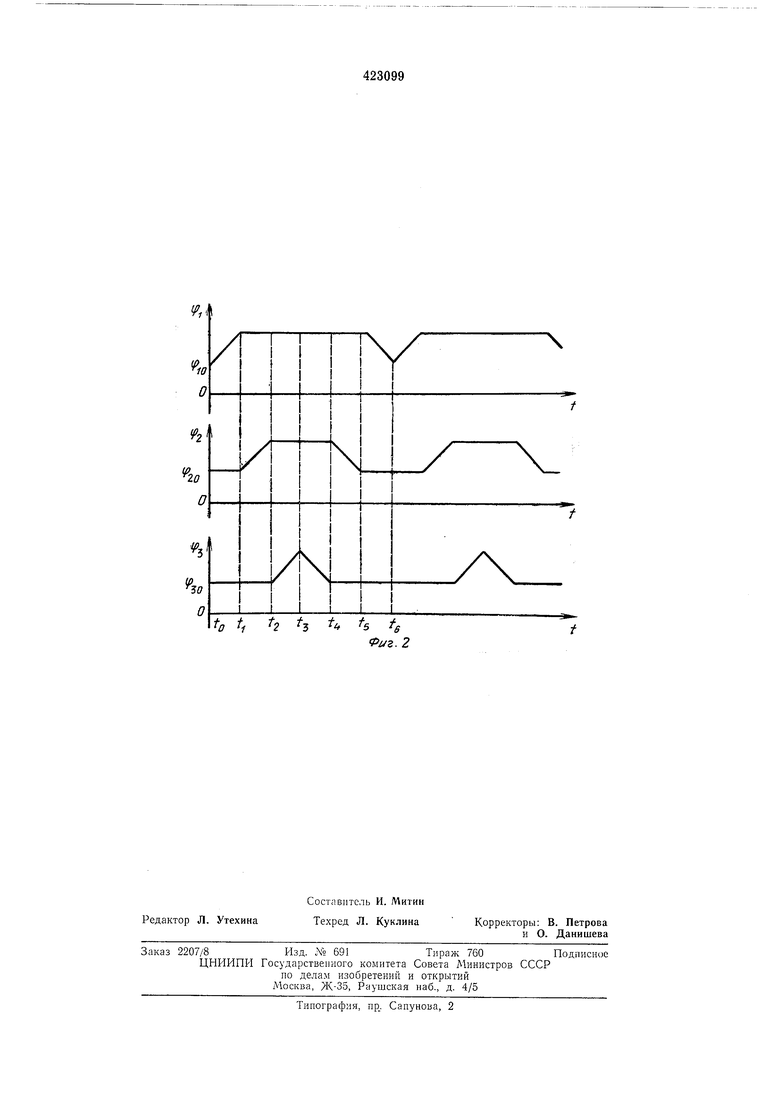
На фиг. 1 показаиа конструкция устройства; фиг. 2 иллюстрирует форму поисковых колебаний на входе объекта в трехмерном случае, где фю, tp2o, фзо и фь ф2, фз - соответственно начальные и текущие значен1 я угла поворота шкива 3; о- б-моменты времени.
Устройство содержит объект регулирования 1, измеритель производпой 2. шкивы 3, связанные с входными валами объекта регулироваиия, ремень 4. регулируемый двигатель 5, ведущи шкив 6, прижимно ролик 7. ходовой винт 8. конечные выключатели 9 и 10, двигатель 11 передачи «ходовой винт-гайка и узел реверса 12.
Детали 3 и 7-12 составляют логический элемент, а детали 4-8 и 11 - генератор
поисковых колсбапи. Ролик 7 выполняет роль коммутатора. Детали 3-6 составляют интеграторы.
Устройство работает следующим образом.
Двигатель 11 вращается с постоянной скоростью посредством передачи «ходовой винт- гайка перемещает прижимной ролик 7 вдоль ряда шкивов 3 и последовательно обеспечивает на некоторое время сцеплепие между отдельны.мн шкивами и ремием 4, который приводи1ся в движение ;1,вигатело1 1 5.
В результате вращения двигателей 5 и 1 шкивы 3. последовательио сцепляясь с движущи:-,ся ремнем 4, поворачиваются на некоторьп угол в одном и том же направлении. Когда ирнжимиой ролик 7 выходит из заиеиления с носледпнм шкивом 3, срабатывает конечиыГ выключатель 9 или 10 и узел реверса 2 реверсирует двигатели 5 и 1. После этого шкивы 3 последовательно поворачиваются в противоположном иаправлеиии.
Таким образом, iia входных валах объекта регулировання, как показано в трехмерном примере на фиг. 2, формируются траиецеидальные поисковые колебания (треугольник можно считать частным случаем трапеции).
При поисковых колебаниях входных валов изменяется выходная величина объекта регулирования, что вызывает появление сигнала производной на выходе измерителя 2.
Еели, например, при поиске максимума производная положительна, то екорость врагцения двигателя 5 увеличивается и соответствепио увеличивается угол поворота шкпва 3 за один нроход ролика 7.
Если нри поиске максимума нроизводиая отрицательна, то скорость вращения двигателя 5 уменьшается, что уменьшает угол поворота шкива 3 в соответствующем нанравлении.
В результате нескольких ироходов ролика 7 вдоль ряда шкивов 3 система находит локальный экстремум регулируемой величины.
Число регулируемых параметров объекта может быть увеличено за счет увеличения числа шкивов 3.
Если входными величинами объекта регулирования являются нанряжения, к входным валам присоединяют элементы, преобразуюп 1,ие угол поворота в напряжение.
П р е /I. м е т и з о б р е т е )i и я
Многомерная система экстремального регулирования с пезавиеимым ноиском, содержащая объект регулирования, измеритель производной регулируемой величины, логический элемеит, генератор поисковых колебаний, коммутатор и интеграторы, отлнчаюп; а я с я тем, что, с целью упрощення системы, она содержит бесконечный ремень, охватываюн1,ий ряд шкивов, связаин з1х с входными валами объекта регулирования, и ведущий шкив, связанный с вало.м регулируемого двигателя, вход которого подключен к измерителю ироизводно регулируемой величины и устройству реверса, связаипому с конечными выключателями и нриводным двигателем нередачи «ходовой винт -гайка, причем на ходовой гайке расположен нрижимной ролик
ремеино передачи, устаповленпой на входе объекта регулирования.
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ л-МЕРНЫХ ИНЕРЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU391535A1 |
| АКТИВНОЕ НАТЯЖНОЕ УСТРОЙСТВО | 2003 |
|
RU2296896C2 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2015 |
|
RU2600688C1 |
| Устройство для автоматической настройки дугогасящего реактора с регулируемым воздушным зазором | 1979 |
|
SU860208A2 |
| Экстремальный регулятор | 1978 |
|
SU744452A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1965 |
|
SU174866A1 |
| УСТАНОВКА ДЛЯ РАСТРОВОЙ СТЕРЕОСЪЕЛ1КИ | 1971 |
|
SU294122A1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| Экстремальный регулятор шагового типа для инерционных объектов регулирования | 1960 |
|
SU137960A1 |
| Шпиндельный узел станка для обработки ступенчатых упорных резьб | 1981 |
|
SU975268A1 |