1
Изобретение относится к области автоматики и контрольно-измерительной техники и может быть применено в электроимнульсных установках.
Известно устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных установках, содержащее сервопривод рабочего электрода, трехпозиционный регулятор, вход которого подключен к выходу датчика тока, соединенного с разрядным контуром электроимпульсной установки.
Однако это устройство работает недостаточно точно, а затраты энергии при обработке деталей сложной конфигурации непроизводительны.
Предложенное устройство отличается тем, что в него введены дешифратор неремены структуры, элемент памяти, элемент задержки и формирователь команд, выход которого подключен ко входу сервопривода рабочего электрода п через элемент задержки к первому входу дешифратора перемены структуры. Первый вход формирователя команд подключен к выходу трехпозиционного регулятора и ко второму входу дешифратора перемены структуры, а второй вход соединен через элемент памяти с выходом дешифратора перемены структуры.
2
Это позволяет повысить точность работы устройства.
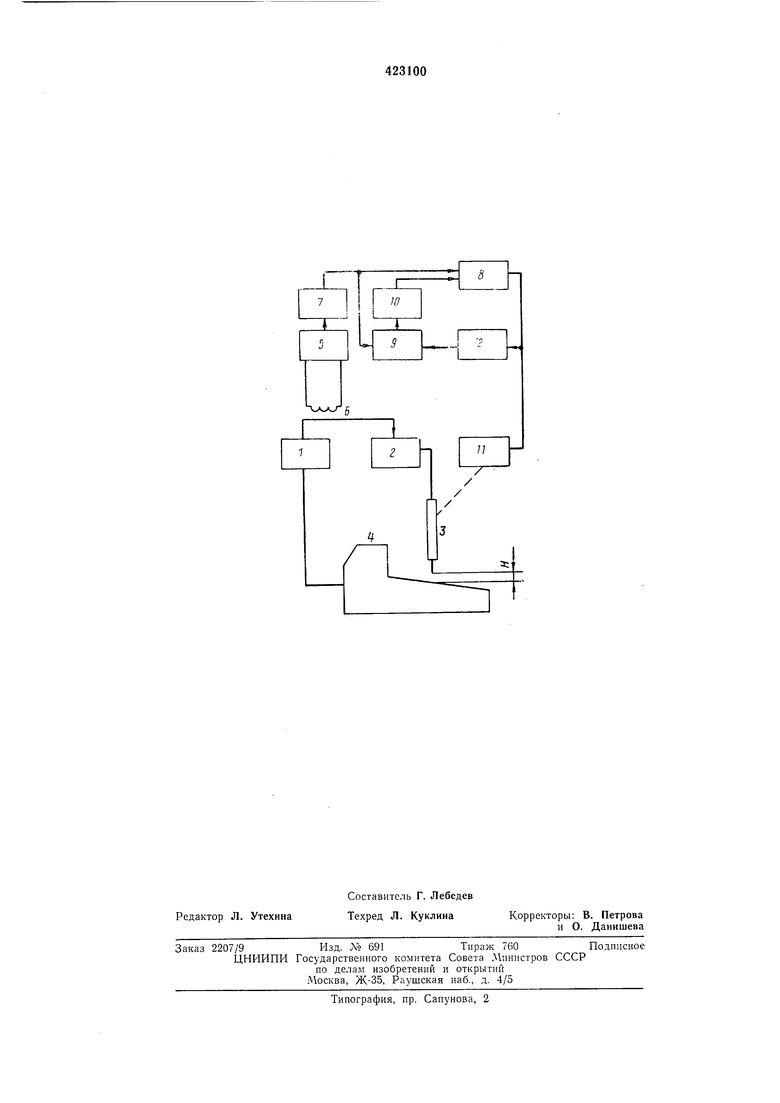
Схема устройства изображена на чертеже, где обозначены; накопитель энергии 1, ком.мутирующий блок 2, рабочий электрод 3, обрабатываемая деталь 4, датчик тока 5 с обмоткой 6, трехпозиционный регулятор 7, формирователь команд 8, дешифратор перемены структуры 9, элемент памяти 10. сервопривод
11 рабочего электрода 3 и элемент задерл.ки 12.
Устройство работает следующим образом. Разрядный контур, образоваппый последовательным включением наконителя энергии 1,
коммутирующего блока 2, рабочего электрода 3 и обрабатываемой детали 4, индуктивно связан с датчнком тока 5 посредством обмотки 6, выход которого подключен к трехпозиционному регулятору 7. Регулятор соединен
со входами формирователя команд 8 и дещифратора перемены структуры 9, который через элемент памяти 10 присоединен к формирователю команд 8. Причем выход формирователя команд 8 связан с сервонрпводом
11 рабочего электрода 3 непосредственно, а с дешифратором перемены структуры 9 через элемент задержки 12. Цепь, состоящая из датчика тока 5 с обмоткой 6, трехпозиционного регулятора 1, сервопривода 11, электрода 3 и межэлсктродного про.чежутка //, представляет собой контур регулирования. Цепь, состояп.1,ая из дешифратора перемены структуры 9, элемента задержки 12 и элемента памяти 10, представляет собой унравляющий контур. Оба контура связаны между собой формирователем команд 8.
В зависимости от формы обрабатываемой поверхности элемент памяти 10 может находиться в трех состояниях А, В и С, которым соответствуют три направления основных иеремепц, «вперед, «вверх и «вниз соответетвеппо. Регулирующие перемещения электрода 3 производятся в направлениях, перпендикулярных основным. При постуиательном дв1 жеппп электрода 3 относительно горизонтальной поверхности обрабатываемой детали 4 элемент памяти 10 устройства находится в состоянии А. Основным перемещением при Я //о1гт является перемещение «вперед, регулирующим перемен1,епием при // ;Яппт - перемеще ;ие «вверх, а при
- «ВПИЗ.
При подъеме электрода 3 относительно вертикальной поверхности детали 4 элемент памяти 10 устройства находится в еостояпии В. Основным перементеннем нри Я Я()пт является перемещение «вверх, регулирующим при H Hoiuf иере.мещение «назад, а при /У /-/оит - «вперед.
При опускании электрс.иа 3 относительно вертнкальиой поверхности деталн 4 эле.мент иамяти 10 устройства находится Б состоянии С. Основным неремеи1ением при Н Нот является неремеи1,еи11е «вниз, регулирую1Д М при //. - перемещение «вперед, а при Я -Яопт - «назад.
Датчик тока 5, индуктпвно связанный с разрядны.м KoirrypOM, вырабатывает аналоговый сигнал, ироиорциоиальный величине разрядного тока установки. Этот сигнал поступает па вход регулятора 7 и в зависимости от величины преобразуется в дискретный.
Снгналы регулятора 7 и элемента намяти iO ноступают на вход формирователя команд 8, который вырабатывает сигнал на основное либо на регулирующее перемещение рабочего электрода 3.
С выхода фор.мирователя 8 команда поступает на сервопривод 11 рабочего электрода 3 и элемент задержки 12.
Сервопривод 11 преобразует команду формирователя 8 в технологичеекое перемещение электрода 3, а элемент задержки 12 подает сигнал на дещифратор перемены структуры 9.
Настройка элемента задержки 12 зависит от рабочей частоты разрядного контура установки, величины онтнмального межэлектродного промежутка Н и параметров сервопривода П. Время задержки устанавливают достаточным для ликвидации малых отклонений рабочего нромежутка Н от онтимальпой величины Яопт. Сигнал о регулирующем перемещении рабочего электрода 3 ироходит через элемент задержки 12 на вход дещифратора перемены структуры 9 лишь в том случае, еслп длительноеть его больше времени задержки, т. е. еслн регулирующее перемеИ1,еиие не достигает цели.
13 зависимости от сигнала о регулирующем неремещении, иоетунившего с элемента задержки 12 и сигнала о величине межэлектродного нромежутка И, непрерывно постунаюи1,его от регулятора 7, дешифратор перемены структуры 9 вырабатывает команду на переброс элемента иамяти 10 в новое состояние в соответствии с изменившейся фор.мой обрабатываемой поверхности детали 4.
Направление основного и регулирующих
перемеи;ений рабочего электрода 3 вырабатываются нредлагаемым устройством в зависимости не только от величины .ежэлектродного промежутка //, но и от внутренней структуры управляющего устройства. Перемена внутренней структуры устройства нронзводится им на основании оценки результата регулирующего воздействия на объект.
Предмет изобретения
Устройство для автоматического управления перемещениям рабочего электрода в электрои-мпульсных установках, содержащее сервопривод рабочего электрода, трехиозипионный регулятор, вход которого иодключеп к выходу датчика тока, соединенного с разрядным контуром электроимпульсной установки, отличающееся тем, что, с целью новышения точности работы устройства, в
него введены дешифратор перемены структуры, элемент памяти, элемент задержки и формирователь команд, выход которого подключей ко входу сервопривода рабочего электрода и через элемент задержки к первому
входу дешифратора перемены структуры; первый вход формирователя команд подключен к выходу трехнозиционпого регулятора и ко второму входу дешифратора перемены структуры, а второй вход соединен через памяти с выходом дешифратора перемены етруктуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных установках | 1985 |
|
SU1285432A1 |
| Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных установках | 1985 |
|
SU1285433A1 |
| Регулятор межэлектродного промежутка электроимпульсной установки | 1977 |
|
SU684512A1 |
| Регулятор межэлектродного промежутка электроимпульсной установки | 1981 |
|
SU1027699A1 |
| Устройство для поддержания межэлектродного промежутка электроимпульсной установки | 1973 |
|
SU439043A1 |
| Способ определения и регистрации некачественных соединений труб при их электроимпульсной запрессовке и устройство для его осуществления | 1983 |
|
SU1117593A1 |
| Устройство для управления электроимпульсной установкой для запрессовки труб | 1988 |
|
SU1665337A2 |
| Цифровое устройство числового программного управления | 1971 |
|
SU441858A1 |
| Устройство для управления электроимпульсной установкой для запрессовки труб | 1984 |
|
SU1327058A1 |
| Устройство для регулирования расходажидКОСТи | 1979 |
|
SU842728A1 |