1Изобретение относится к системам промышленной автоматики, в частности к устройствам для автоматического управления перемещениями рабочего электрода в электроимпульсных установках, например в электрогидравлических установках очистки отливок.
Цель изобретения - обеспечение возможности обработки замкнутых выпуклых и вогнутых поверхностей в диапазоне более 360°.
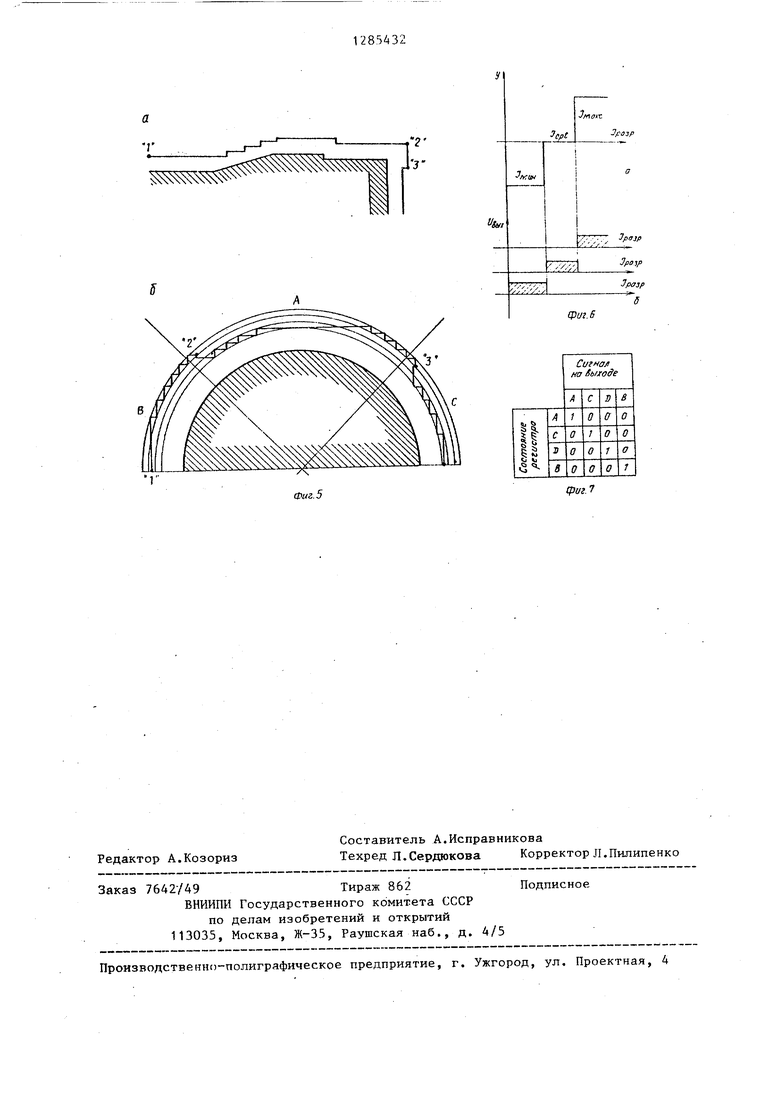
На фиг. 1 представлена схема устроства; на фиг.2 - схема формирователя команд; на фиг.З - схема дешифратора перемены структуры и временные диаграммы; на фиг.4 последовательность переключения регистра при обработке выпуклой и вогнутой поверхности; на фиг.З - траекто рия рабочего электрода на примере обработки поверхности выпуклой полусферы; на фиг.6 - характеристика трехпозиционного регулятора; на фиг.7 - таблица состояний регистра.
Устройство содержит накопитель 1 энергии, коммутирующее устройство 2 рабочий электрод 3, обрабатываемую деталь 4, датчик 5 тока, обмотку 6,
трехпозиционный регулятор 7, внешнее управляющее устройство 8, элемент 9 задержки, дешифратор 10 перемены структуры, четырехразрядный кольцевой реверсивный сдвигающий регистр 11, формирователь 12 команд, сервопривод 13 рабочего электрода.
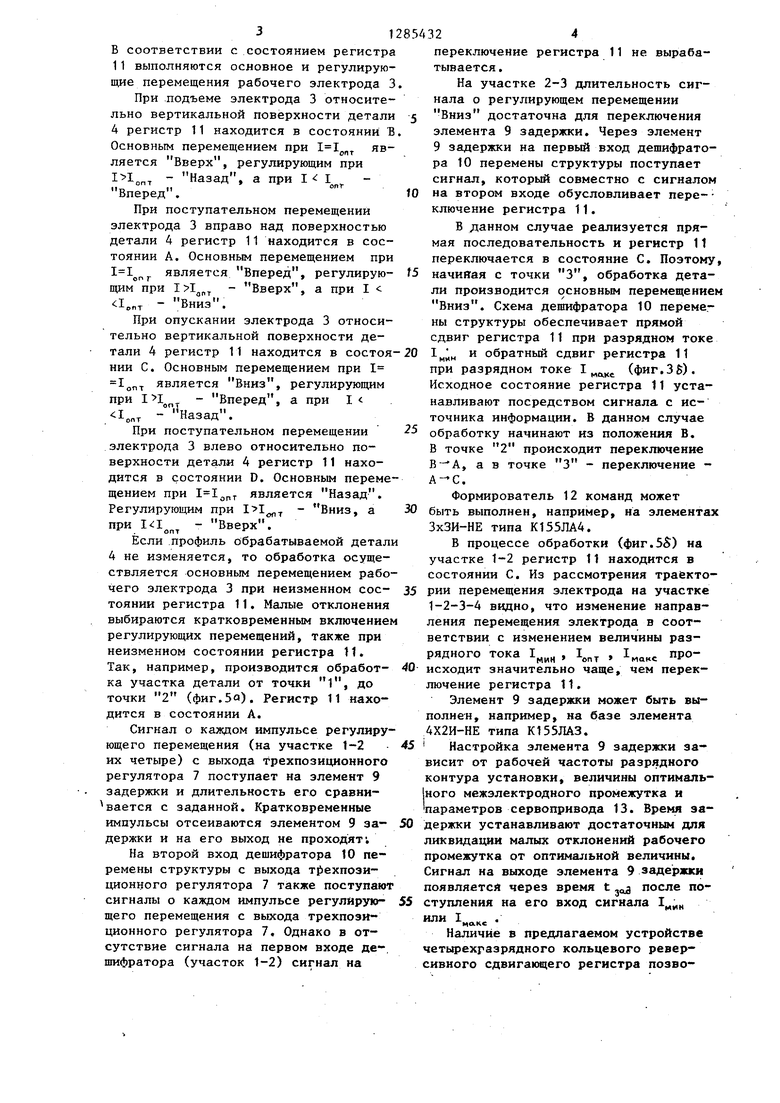
Формирователь команд содержит элементы 14 - 21. Дешифратор перемены структуры содержит элементы И-НЕ 22 и 23.
Накопитель 1 энергии представляет собой батарею импульсных конденсаторов, которые заряжены до напряжения срабатывания коммутирующего устройства 2. В качестве последнего использованы искровые разрядники.
Соединенные последовательно накопитель 1 энергии, коммутирующее устройство 2, рабочий электрод 3 и обрабатываемая деталь 4 образуют разрядный контур. В промежутке между ра- бочим электродом 3 и обрабатываемой деталью возбуждаются импульсы давлен- ния, которые и производят обработку ее поверхности.
Датчик 5 тока состоит обычно из выпрямительного диода и сглаживающей RC-цепочки. Связь его с разрядным контуром обеспечивается обмоткой 6.
Устройство работает следующим образом.
Датчик 5 тока, индуктивно связанный с разрядным контуром, вырабатывает аналоговый сигнал, пропорциональный величине разрядного тока установки. Этот сигнал поступает на вход трехпозиционного регулятора 7 и в зависимости от его величины преобразуется в дискретный - I ,1 ,„,-.
макс мин опт
5
0
0
Четырехрязрядный кольцевой реверсивный сдвигающий регистр 11 может быть выполнен, например, на базе четырехразрядного универсального сдвигового регистра типа К155ИР1.
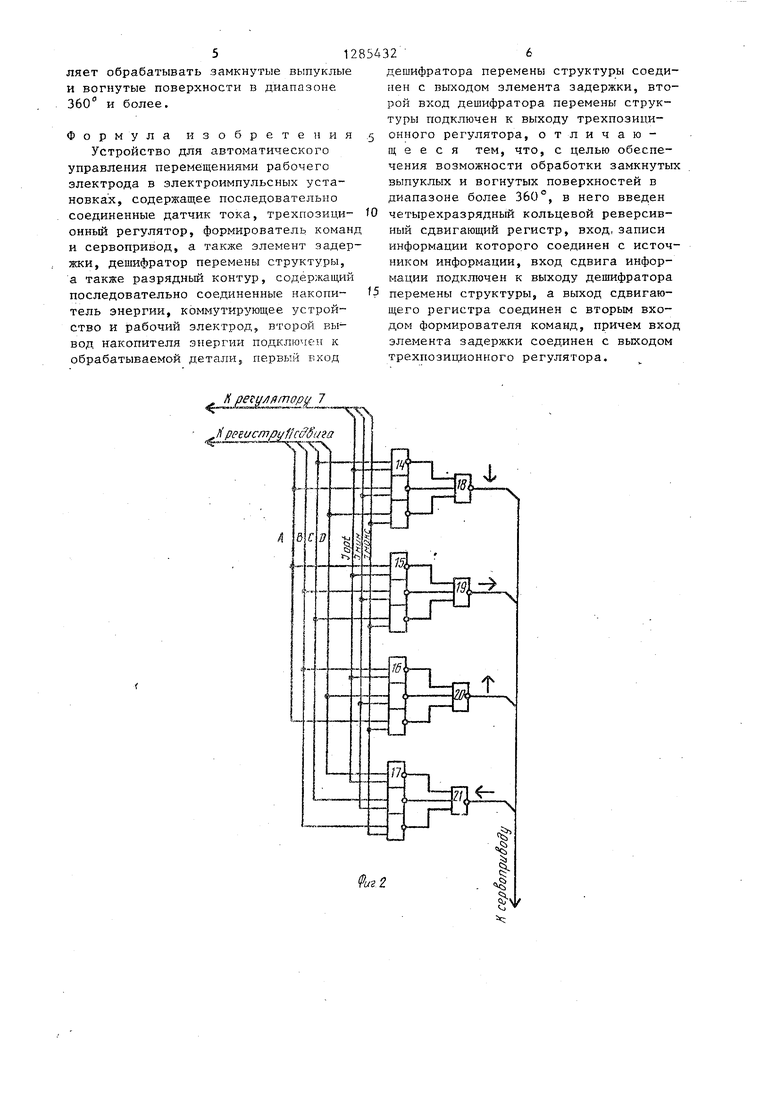
В зависимости от исходного положения рабочего электрода 3 относительно обрабатываемой детали 4 четырехразрядный кольцевой реверсивный сдвигающий регистр 11 устанавливается в одно из возможных состояний A,B,C,D (фиг.2) подачей на его вход записи информации сигнала посредством источника информации. Для выпуклой поверхности (фиг.4а) порядок переключения A,C,D,B, а для вогнутой (фиг.48) порядок переключения обратный - B,D,C,A.
Буквенная характеристика состояния элемента 11 (A,C,D,B) указывает, что на выходе-соответствующего разряда регистра сдвига - потенциал 1, а на всех остальных потенциал О. Все четыре состояния, характеризующие состояние уровней на выходах A,C,D,B, 5 регистра 11 показаны в таблице (фиг.2), причем состояния регистра 11 отражают расположения рабочего электрода 3 относительно обрабатываемой детали 4:
5
А - сверху, В - слева, С - справа, D - снизу. Если, например, электрод 3 расположен сверху над поверхностью детали 4, то регистр 11 находится в положении А. При этом разряд А регистров 11 находится в состоянии 1, а разряды C,D,B - в состоянии О.
В соответствии с изменением расположения электрода 3 относительно обрабатываемой детали 4 происходит переключение регистра 11.
При обработке выпуклой поверхности переключения регистра 11 выполняются
при 1„ин
При обработке вогнутой поверхности переключения регистра 11 выполняются
при
Состояние регистра 11 отражает расположение рабочего.электрода 3 относительно обрабатываемой детали 4.
В соответствии с состоянием регистра 11 выполняются основное и регулирующие перемещения рабочего электрода 3
При -подъеме электрода 3 относительно вертикальной поверхности детали 4 регистр 11 находится в состоянии Б Основным перемещением при является Вверх, регулирующим при , - Назад, а при 1 1 - Вперед.
При поступательном перемещении электрода 3 вправо над поверхностью детали 4 регистр 11 находится в состоянии А. Основным перемещением при . является Вперед, регулирую- щим при Вверх, а при I 1„„ - Вниз.
При опускании электрода 3 относительно вертикальной поверхности детали 4 регистр 11 находится в состоя НИИ С. Основным перемещением при 1 1,„ является Вниз, регулирующим при ,п - Вперед, а при 1 „„, - Назад.
При поступательном перемещении электрода 3 влево относительно поверхности детали А регистр 11 находится в состоянии D. Основным перемещением при является Назад. Регулирующим при Вниз, а при - Вверх.
Если профиль обрабатываемой детал 4 не изменяется, то обработка осуществляется основным перемещением рабочего электрода 3 при неизменном сое- тоянии регистра 11. Малые отклонения выбираются кратковременным включение регулирующих перемещений, также при неизменном состоянии регистра Я. Так, например, производится обработ- ка участка детали от точки 1, до точки 2 (фиг.За). Регистр 11 находится в состоянии А.
Сигнал о каждом импульсе регулирующего перемещения (на участке 1-2 их четыре) с выхода трехпозиционного регулятора 7 поступает на элемент 9 задержки и длительность его сравни- вается с заданной. Кратковременные импульсы отсеиваются элементом 9 за- держки и на его выход не проходят;
На второй вход дешифратора 10 перемены структуры с выхода т ехпози- ционного регулятора 7 также поступают сигналы о каждом импульсе регулирую- щего перемещения с выхода трехпозиционного регулятора 7. Однако в отсутствие сигнала на первом входе де-, шифратора (участок 1-2) сигнал на
переключение регистра 11 не вырабатывается .
На участке 2-3 длительность сигнала о регулирующем перемещении Вниз достаточна для переключения элемента 9 задержки. Через элемент 9 задержки на первый вход дешифратора 10 перемены структуры поступает сигнал, который совместно с сигналом на втором входе обусловливает переключение регистра 11.
В данном случае реализуется прямая последовательность и регистр 11 переключается в состояние С. Поэтому начияая с точки 3, обработка детали производится основным перемещение Вниз. Схема дешифратора 10 перемены структуры обеспечивает прямой сдвиг регистра 11 при разрядном токе 1 и обратный сдвиг регистра 11
при разрядном токе I . (ФИГ.ЗЮ.
Исходное состояние регистра 11 устанавливают посредством сигнала, с источника информации. В данном случае обработку начинают из положения В. В точке 2 происходит переключение , а в точке 3 - переключение - А- С.
Формирователь 12 команд может быть выполнен, например, на элемента ЗхЗИ-НЕ типа К155ЛА4.
В процессе обработки (фиг.5$) на участке 1-2 регистр 11 находится в состоянии С. Из рассмотрения тра1екто рии перемещения электрода на участке 1-2-3-4 видно, что изменение направления перемещения электрода в соответствии с изменением величины разрядного тока 1 , , 1„„ происходит значительно чаще, чем переключение регистра 11.
Элемент 9 задержки может быть выполнен, например, на базе элемента 4Х2И-НЕ типа К155ЛАЗ.
Настройка элемента 9 задержки зависит от рабочей частоты разрядного контура установки, величины оптимального межэлектродного промежутка и параметров сервопривода 13. Время эа- держки устанавливают достаточным для ликвидации малых отклонений рабочего промежутка от оптимальной величины. Сигнал на выходе элемента 9 задержки появляется через время t после поступления на его вход сигнала или .
Наличие в предлагаемом устройстве четырехразрядного кольцевого реверсивного сдвигающего регистра позволяет обрабатывать замкнутые выпуклые и вогнутые поверхности в диапазоне 360 и более.
Формула изобретения
Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных установках, содержащее последовательно соединенные датчик тока, трехпозици- оиньш регулятор, формирователь команд и сервопривод, а также элемент задержки, дешифратор перемены структуры, а также разрядный контур, содержащий последовательно соединенные накопитель энергии, коммутирующее устройство и рабочий электрод, второй вывод накопителя энергии подключен к обрабатываемой детали, первый вход
rfE-Ji 2
5
дешифратора перемены структуры соединен с выходом элемента задержки, второй вход дешифратора перемены структуры подключен к выходу трехпозици- онного регулятора, отличающееся тем, что, с целью обеспечения возможности обработки замкнутых выпуклых и вогнутых поверхностей в диапазоне более 360°, в него введен четырехразрядный кольцевой реверсивный сдвигающий регистр, вход, записи информации которого соединен с источником информации, вход сдвига информации подключен к выходу дешифратора перемены структуры, а выход сдвигающего регистра соединен с вторым входом формирователя команд, причем вход элемента задержки соединен с выходом трехпозиционного регулятора.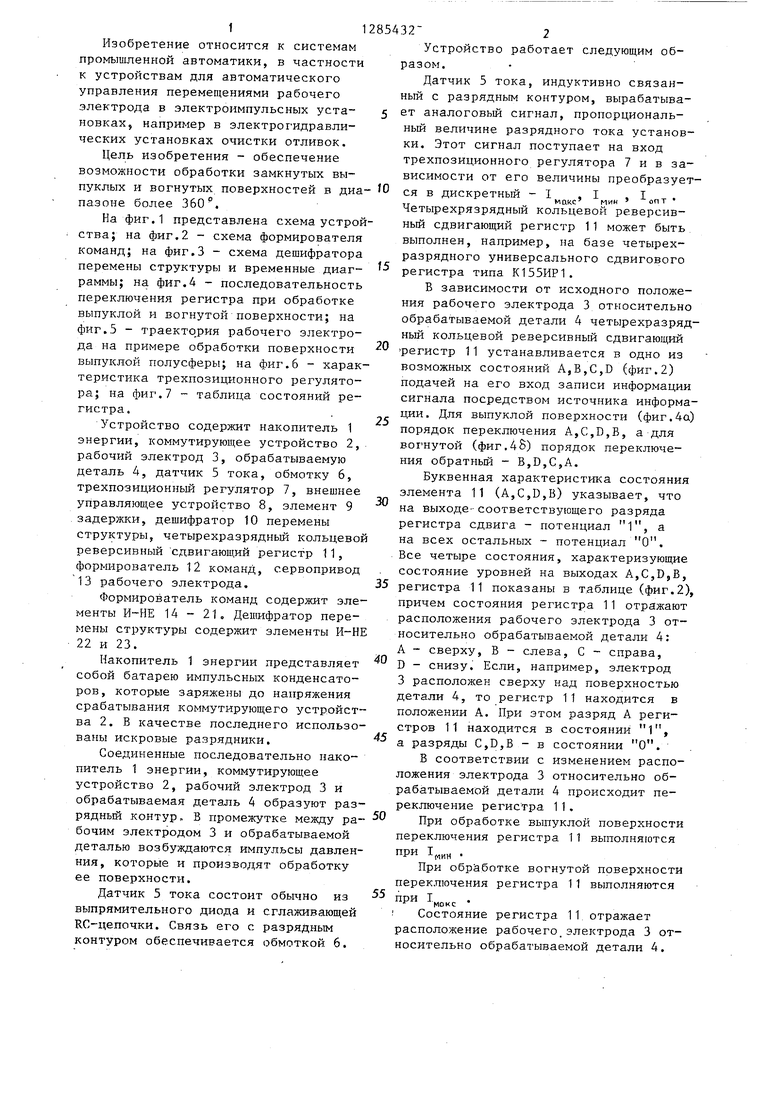
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯПЕРЕМЕЩЕНИЯМИ РАБОЧЕГО ЭЛЕКТРОДАВ ЭЛЕКТРОИМПУЛЬСНЫХ УСТАНОВКАХ | 1972 |
|
SU423100A1 |
| Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных установках | 1985 |
|
SU1285433A1 |
| Устройство для числового программного управления | 1989 |
|
SU1737410A1 |
| Устройство для автоматического переключения однофазных нагрузок в низковольтных распределительных сетях | 1981 |
|
SU1026234A1 |
| Устройство для программного управления | 1989 |
|
SU1728849A1 |
| Корректор межсимвольных искажений | 1987 |
|
SU1417198A1 |
| Управляемая линия задержки | 1990 |
|
SU1725370A2 |
| Управляемая линия задержки | 1984 |
|
SU1197068A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Регулятор межэлектродного промежутка электроимпульсной установки | 1981 |
|
SU1027699A1 |
Изобретение относится к системам промышленной автоматики, в частности к устройствам для автоматического управления перемещениями рабочего электрода в электроимпульсных установках, например в электрогидравлических установках очистки отливок. Целью изобретения является обеспечение возможности обработки замкнутых выпуклых и вогнутых поверхностей в диапазоне более 360 , В устройство введен четырехразрядный кольцевой реверсивный сдвигающий регистр 11, который в зависимости от исходного положения рабочего электрода 3 относительно обрабатываемой детали 4 устанавливается р одно из четырех возможных состояний подачей на его вход записи информации сигнала посредством источника информации.- Ферми-. рователь 12 команд управляет сервоприводом 13 в зависимости от информации о величине межэлектродного промежутка, поступающей от трехпозиционного регулятора 7, и информации о положении рабочего электрода 3 относительно произвольно ориентированной поверхности обрабатываемой детали 4. Изменение профиля обрабатываемой поверхности фиксирует элемент 9 задержки. Дешифратор 10 перемены структуры в зависимости от знака.рассогласования величины межэлектродного промежутка по сигналу элемента 9 задержки производит переключение четырехразрядного кольцевого реверсивного сдвигакицего регистра 11. Направление основного и регулирующих перемещений рабочего электрода 3 приводится в соответствие с изменившимся профилем обрабатываемой детали А, 7 ил. i (Л tc 00 сд 4 00 tsD
.ж
.J
Г
gJL,
Г
t
i
SodepMixa J L
JnuH
Знаке.
Пряной cffffue U
ffffpomHtiu fffSut u
ч
паке Унин
Уадер на Пряпой cffSug Обратнь/и cdffue
i
A
. i
t i
ФтЛ
.
к$;
ycft
fo:sp
/.. разр
Фиг. 5
разр
фиг.6
фигЛ
Редактор А.Козориз
Составитель А.Исправникова
Техред Л.Сердюкова Корректор л.Пилипенко
Заказ 7642749Тираж 862
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Способ образования окрасок на волокнах | 1925 |
|
SU437A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯПЕРЕМЕЩЕНИЯМИ РАБОЧЕГО ЭЛЕКТРОДАВ ЭЛЕКТРОИМПУЛЬСНЫХ УСТАНОВКАХ | 1972 |
|
SU423100A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
