112
Изобретение относится к системам пром шленной автоматики, в частности к устройствам для автоматического управления перемещениями рабочего электрода в электроимпульсных уста- новках, например электрогидравлических установках очистки отливок.
Цель изобретения - уменьшение времени обработки и повышение ее качества.
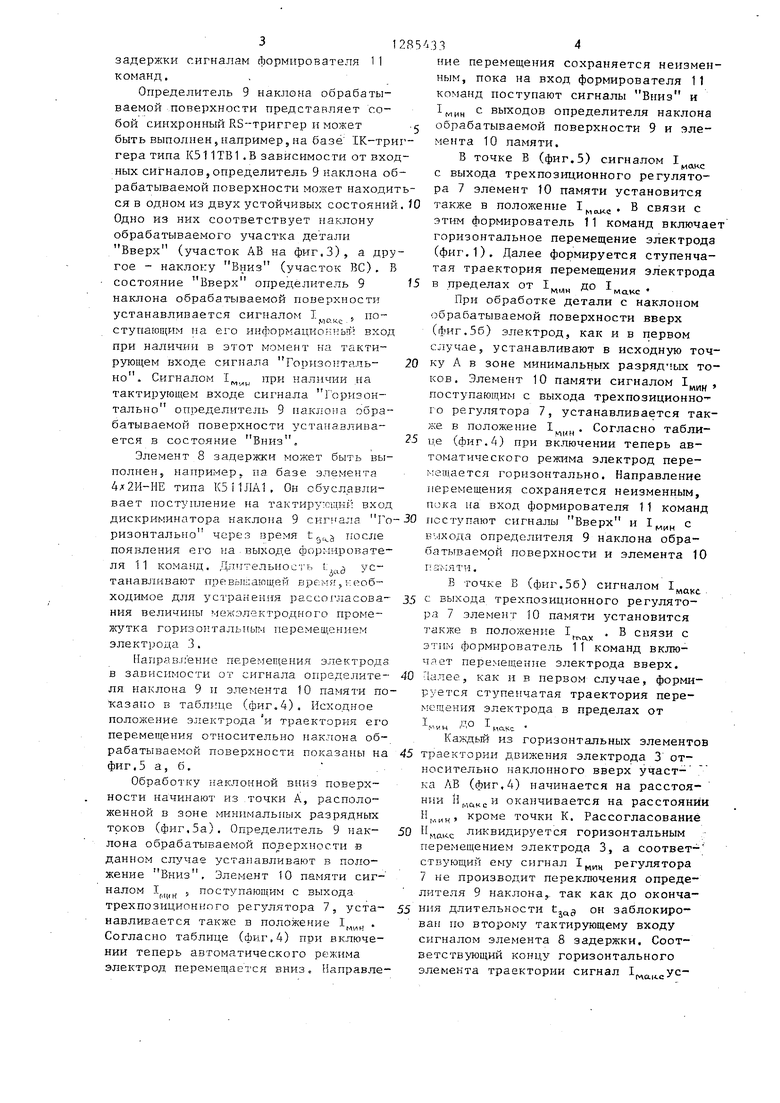
На фиг.1 представлена схема устройства; на фиг.2 - схема формирователя команд; на фиг;3 - траектория перемещения электрода относительно
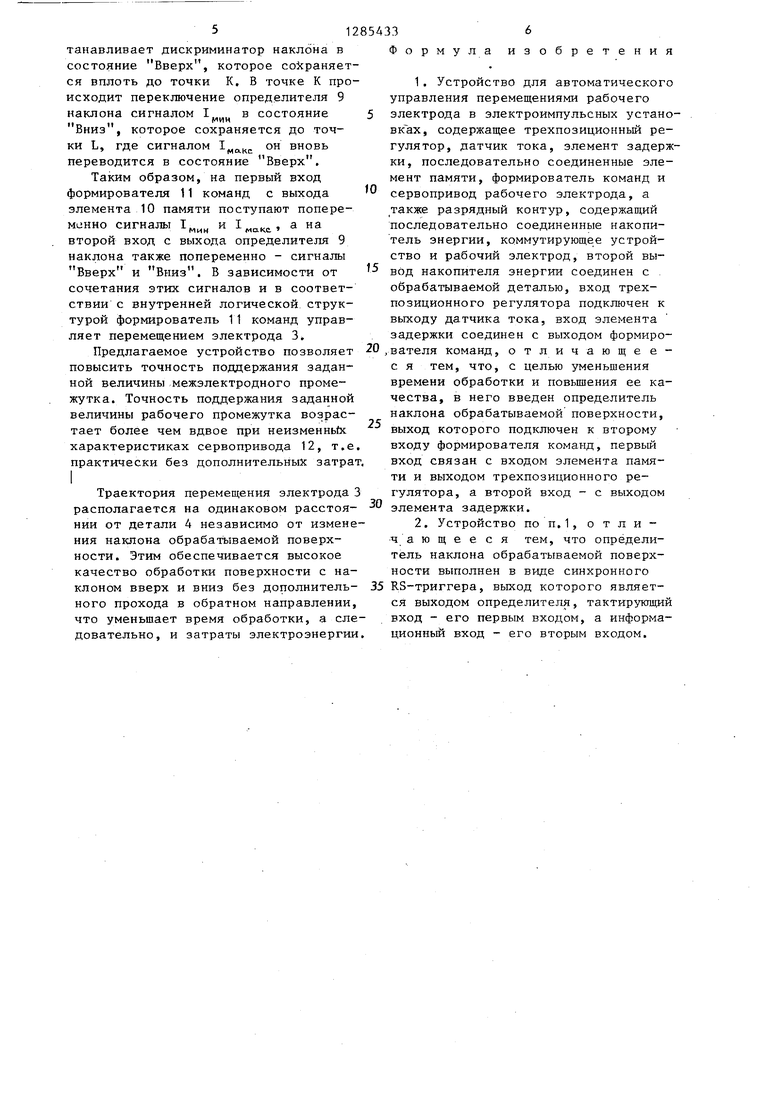
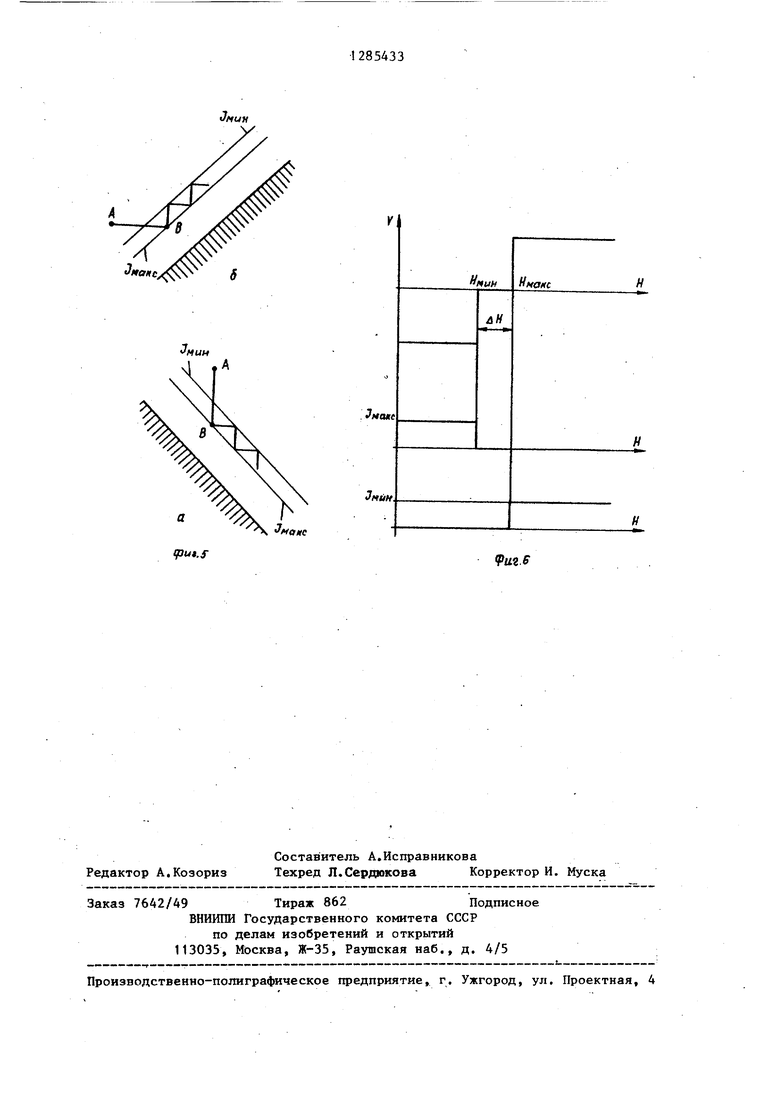
обрабатываемой деталиi где Н - минимальная величина рабочего промежутка; йН - в зоне нечувствительности; аЪ - в зоне возврата; на фиг.4 - таблица направлений движений электрода в зависимости от сигналов на выходах определителя наклона обрабатываемой поверхности и элемента памяти; на фиг.5 - траектория движения .электрода и его исходное положение; на фиг.6 - характеристика трехпози- ционного регулятора.
Устройство содержит накопитель 1 энергии, коммутирующее устройство 2, рабочий электрод 3, обрабатываемую деталь 4, датчик 5 тока, обмотку 6, трехг озиционный регулятор 7, элемент 8 задержки, определитель 9 наклона обрабатываемой поверхности, элемент 10 памяти, формирователь 11 команд, сервопривод 12.
Формирователь 11 команд содержит элементы И-НЕ 13. Соединенные последовательно накопитель 1 энергии, коммутирующее устройство 2, рабочий элетрод 3 и обрабатываемая деталь 4 образуют разрядньй контур.
Накопитель 1 энергии представляет собой батарею импульсных конденсаторов . В процессе работы их заряжают до напряжения срабатывания коммутирующего устройства 2, в качестве которого используют обычно искровые разрядники. В промежутке между рабочим электродом 3 и обрабатываемой деталью 4 возбуждаются импульсы давления, которые и производят обработку ее поверхности.
Датчик 5 тока состоит обычно из выпрямителя (диода) и сглаживающей RC-цепочки. Связь его с разрядным контуром обеспечивается обмоткой 6.
Устройство работает следующим образом.
0
32
Управление перемещением рс бочего электрода 3 происходит в зависимости от величины разрядного тока I
,кc:
Датчик 5 тока, индуктивно связанный с разрядным контуром, вырабатывает аналоговый сигнал, пропорциональный величине разрядного тока установки. Этот сигнал поступает на вход трехпозиционного регулятора 7 и в зависимости от величины его преобразуется в дискретный - 1„„ либо IM«KC
Элемент 10 памяти представляет
собой асинхронный RS-триггер и может быть выполнен, например, на базе IK- триггера типа К511ТВ1. В зависимости от сигналов I |„.ц либо 1„. , поступающих от регулятора 7, он устанавливается в одно из двух устойчивых состояний I, и 1„,,., (1
Макс ИИ
и о ). Формирователь 11 команд представляет собой дешифратор и может быть выполнен, например, на базе логических элементов типа К511ЛА2 и К511ЛАЗ. В соответствии с внутренней структурой формирователя 11 команд (фиг.2) направление перемещения электрода 3 относительно детали 4 изменяется на 90 после каждого переключения элемента 10 памяти из состояния состояние ратно. Таким образом, элемент 10 памяти совместно с регулятором 7 и формирователем 11 команд обуславливает ступенчатую траекторию перемещения электрода 3 относительно детали 4.
Направление каждого из элементов траектории определяется состоянием элемента 10 памя7 и, -мин и наклоном поверхности обрабатываемой детали на данном участке. При обработке участка АВ состоянию элемента 10
45
. памяти .„
50
соответствует перемеще55
ние, Вверх, а при обработке участка ВС - перемещение Горизонтально. При обработке участка АВ состоянию элемента 10 памяти 1„,ц соответствует перемещение Горизонтально, при обработке участка ВС - перемещение Вниз,.
Наклон о брабатываемого участка детали Вверх или Вниз в соответствии с принятым направлением горизонтального перемещения определяется определителем 9 наклонаобрабатыва- емой поверхности по сигналам регулятора 7 и поступающим через элемент 8
задержки сигналам формирователя 11 команд.
Определитель 9 наклона обрабатываемой поверхности представляет собой синхронный PvS-триггер и может -с быть выполнен, например, на базе 1К-триг- гера типа К511 ТВ 1 .В зависимости от входных сигналов, определитель 9 наклона обрабатываемой поверхности может находиться в одном из двух устойчивых состояний. JO также в положение I
перемещения сохр ным, пока на вход фо команд поступают сиг I f С ВЫХОДОВ опред обрабатываемой повер мента 10 памяти.
В точке В (фиг.5) с выхода трехпозицио ра 7 элемент 10 памя
Одно из них соответствует наклону обрабатываемого участка детали Вверх (участок АВ на фиг.З), а другое - наклону Вниз (участок ВС), В состояние Вверх определитель 9 наклона обрабатываемой поверхности устанавливается сигналом 1,р, s поступающим на его информадионкь вход при наличии в этот момент на тактирующем входе сигнала Горизонталь-
но
Сигналом I,
-м.н наличии ,на тактирующем входе сигнала Г оризон- тально определитель 9 наклона обрабатываемой поверхности устанавливается в состояние Вниз.
Элемент 8 задержки может быть вы- , например, на базе элемента 4л2И-НЕ типа К5МЛА1, Он обусл.авли- вает поступление на тактиру:сацкй вход дискриминатора наклона 9 сигр ала ризонтально через время после появления его на выходе формирователя 11 команд. Длительность 1:, Устанавливают превьилающей время, необходимое для устранения рассогмшсова- ния величины межэлектродного проме- лсутка горизо1 талы1ым перемеа1,ениег- электрода 3.
Направление пере.еп1;ения электрода в зависимости от сигнала определителя наклона 9 и элемента 10 памяти по- казано в табл1 це (фиго4). Исходное положение электрода и траектория его перемещения относительно наклона обГорабатываемой поверхности показаны на 45 траектории движения электрода 3 от- фиг.З а, б. .
Обработку наклонной вниз поверхности начинают из точки А, расположенной в зоне минимальных разрядных токов (фиг.За). Определитель 9 наклона обрабатываемой по зерхности в данном случае устанавливают в положение Вниз, Элемент 10 памяти сигносительно наклонного вверх участ- ка АВ (фиг,4) начинается на расстоя- HiiH iI|...,uKc оканчивается на расстояни к,ин кроме точки К. Рассогласование 50 11„акс ликвидир5 ется горизонтальным перемещением электрода 3, а соответствующий ему сигнал „„„ регулятора 7 не производит переключения определителя 9 наклонаJ, так как до окончаналом Т
МП к
поступающим с выхода
носительно наклонного вверх участ- ка АВ (фиг,4) начинается на расстоя HiiH iI|...,uKc оканчивается на расстоян к,ин кроме точки К. Рассогласовани 50 11„акс ликвидир5 ется горизонтальным перемещением электрода 3, а соответ ствующий ему сигнал „„„ регулятора 7 не производит переключения определителя 9 наклонаJ, так как до окончатрехпозидионного регулятора 7, уста- 55 ния длительности он заблокиро- навливается также в положение ,,,„„ . Согласно таблиде (фиг,4) при включении теперь автоматического режима электрод перемещается вниз, Направлеван по второму тактирующему входу сигналом элемента 8 задержки. Соответствующий концу горизонтального
элемента траектории сигнал сч-.
с O также в положение I
перемещения сохраняется неизменным, пока на вход формирователя 11 команд поступают сигналы и I f С ВЫХОДОВ определителя наклона обрабатываемой поверхности 9 и элемента 10 памяти.
В точке В (фиг.5) сигналом с выхода трехпозиционного регулятора 7 элемент 10 памяти установится
В связи с
этим формирователь 11 команд включает горизонтальное перемещение электрода (фиг.1). Далее формируется ступенчатая траектория перемещения электрода в пределах от „,,„ до 1„, ,
При обработке детали с наклоном обрабатываемой поверхности вверх (фиг,56) электрод, как и в первом случае, устанавливают в исходную точку А в зоне минимальных разрядных токов . Элемент 10 памяти сигналом поступающим с выхода трехпозиционного регулятора 7, устанавливается также в положение 1
Согласно табли
25
lie (фиг. 4) при включении теперь автоматического режима электрод пере- Г :ео1ается горизонтально. Направление перемещения сохраняется неизменным, пока на вход формирователя 11 команд 30 поступают сигналы Вверх и 1, с выхода определителя 9 наклона обрабатываемой поверхности и элемента 10
ПЗ МЯТИ.
в точке В (фиг.Зб) сигналом 1„ац 35 с выхода трехпозидпонного регулятора 7 элемент 10 памяти установится также в положение I . В связи с
ЭТИМ формирователь 11 команд включает перемещение электрода вверх. Лалее, как и в первом случае, формируется ступенчатая траектория перемещения электрода в пределах от
и н иакс
Каждьй из горизонтальных элементов
40
траектории движения электрода 3 от-
носительно наклонного вверх участ- . ка АВ (фиг,4) начинается на расстоя- HiiH iI|...,uKc оканчивается на расстоянии к,ин кроме точки К. Рассогласование 11„акс ликвидир5 ется горизонтальным перемещением электрода 3, а соответ ствующий ему сигнал „„„ регулятора 7 не производит переключения опредеителя 9 наклонаJ, так как до окончания длительности он заблокиро-
ван по второму тактирующему входу сигналом элемента 8 задержки. Соответствующий концу горизонтального
ния длительности он заблокиро-
элемента траектории сигнал сч-.
танавливает дискриминатор наклона в состояние Вверх, которое со сраняет- ся вплоть до точки К, В точке К происходит переключение определителя 9
наклона сигналом I в состояние
Вниз , которое сохраняется до точки L, где сигналом 1„о.кс ° вновь переводится в состояние Вверх. Таким образом, на первый вход формирователя 11 команд с выхода элемента 10 памяти поступают попеременно сигналы и 1„ц(., а на второй вход с выхода определителя 9 наклона также попеременно - сигналы Вверх и Вниз. В зависимости от сочетания этих сигналов и в соответствии с внутренней логической структурой формирователь 11 команд управляет перемещением электрода 3
Предлагаемое устройство позволяет повысить точность поддержания заданной величины межэлектродного промежутка. Точность поддержания заданной величины рабочего промежутка возрастает более чем вдвое при неизменнь{х характеристиках сервопривода 12, т.е практически без дополнительных затра
Траектория перемещения электрода 3
чп располагается на одинаковом расстоя- -
НИИ от детали 4 независимо от изменения наклона обрабатываемой поверхности. Этим обеспечивается высокое
на1.Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных устано вк ах, содержащее трехпозиционный регулятор, датчик тока, элемент задерж ки, последовательно соединенные элемент памяти, формирователь команд и сервопривод рабочего электрода, а также разрядный контур, содержащий последовательно соединенные накопитель энергии, коммутирующее устройство и рабочий электрод, второй вывод накопителя энергии соединен с обрабатываемой деталью, вход трех- позиционного регулятора подключен к выходу датчика тока, вход элемента задержки соединен с выходом формирователя команд,отличающее- с я тем, что, с целью уменьшения времени обработки и повышения ее качества, в него введен определитель наклона обрабатываемой поверхности, выход которого подключен к второму входу формирователя команд, первый вход связан с входом элемента памяти и выходом трехпозиционного регулятора, а второй вход - с выходом элемента задержки.
2.Устройство по п.1, о т л и - ч а ю щ е е с я тем, что определитель наклона обрабатываемой поверхности выполнен в виде синхронного
качество обработки поверхности с клоном вверх и вниз без дополнитель- 35 RS-триггера, выход которого являет- ного прохода в обратном направлении, ся выходом определителя, тактирующий что уменьшает время обработки, а еле- вход - его первым входом, а информа- довательно, и затраты электроэнергии. ционньй вход - его вторым входом.
и
обретения
1.Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных устано- вк ах, содержащее трехпозиционный регулятор, датчик тока, элемент задержки, последовательно соединенные элемент памяти, формирователь команд и сервопривод рабочего электрода, а также разрядный контур, содержащий последовательно соединенные накопитель энергии, коммутирующее устройство и рабочий электрод, второй вывод накопителя энергии соединен с обрабатываемой деталью, вход трех- позиционного регулятора подключен к выходу датчика тока, вход элемента задержки соединен с выходом формирователя команд,отличающее- с я тем, что, с целью уменьшения времени обработки и повышения ее качества, в него введен определитель наклона обрабатываемой поверхности, выход которого подключен к второму входу формирователя команд, первый вход связан с входом элемента памяти и выходом трехпозиционного регулятора, а второй вход - с выходом элемента задержки.
2.Устройство по п.1, о т л и - ч а ю щ е е с я тем, что определитель наклона обрабатываемой поверхности выполнен в виде синхронного
RS-триггера, выход которого являет- ся выходом определителя, тактирующий вход - его первым входом, а информа- ционньй вход - его вторым входом.
К определителю
наклона
К ancfteHrrrg
памяти
е
/J
/JQ
/JA
л
13
Л
ВВер
S
фиг.2
„вниз
(риг.З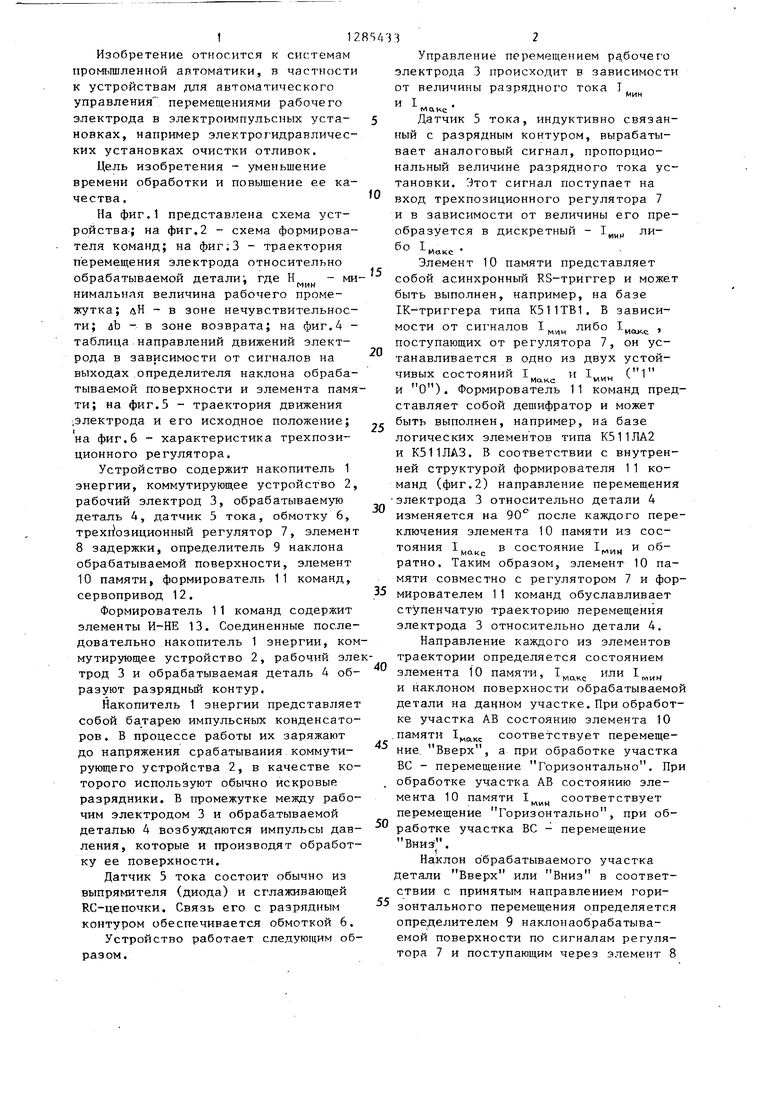
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯПЕРЕМЕЩЕНИЯМИ РАБОЧЕГО ЭЛЕКТРОДАВ ЭЛЕКТРОИМПУЛЬСНЫХ УСТАНОВКАХ | 1972 |
|
SU423100A1 |
| Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных установках | 1985 |
|
SU1285432A1 |
| Система автоматического регулирования | 1983 |
|
SU1095134A1 |
| Регулятор межэлектродного промежутка электроимпульсной установки | 1981 |
|
SU1027699A1 |
| Способ определения и регистрации некачественных соединений труб при их электроимпульсной запрессовке и устройство для его осуществления | 1983 |
|
SU1117593A1 |
| Система автоматического регулирования электроимпульсной установки | 1985 |
|
SU1315937A1 |
| Устройство для нанесения покрытий | 1982 |
|
SU1058635A1 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Регулятор межэлектродного промежутка электроимпульсной установки | 1977 |
|
SU684512A1 |
Изобретение относится к системам промышленной автоматики, в частности к устройствам для автоматического управления перемещениями рабочего электрода в электроимпульсных установках, например электрогидравлических установках очистки отливок. Целью изобретения является уменьшение времени обработки и повышение ее качества. В устройство введен определитель наклона обрабатываемой поверхности, выполненный в виде синхронного RS-триггера, который в зависимости от сигналов формирователя 11 команд и трехпозиционного регулятора 7 вырабатывает сигналы о наклоне обрабатываемой поверхности Вверх или Вниз. Электрод 3 перемещается по ступенчатой траектории, ограниченной зоной возврата, а не зоной нечувствительности, как в прототипе. 1 з.п. ф-лы, 6 ил. (Л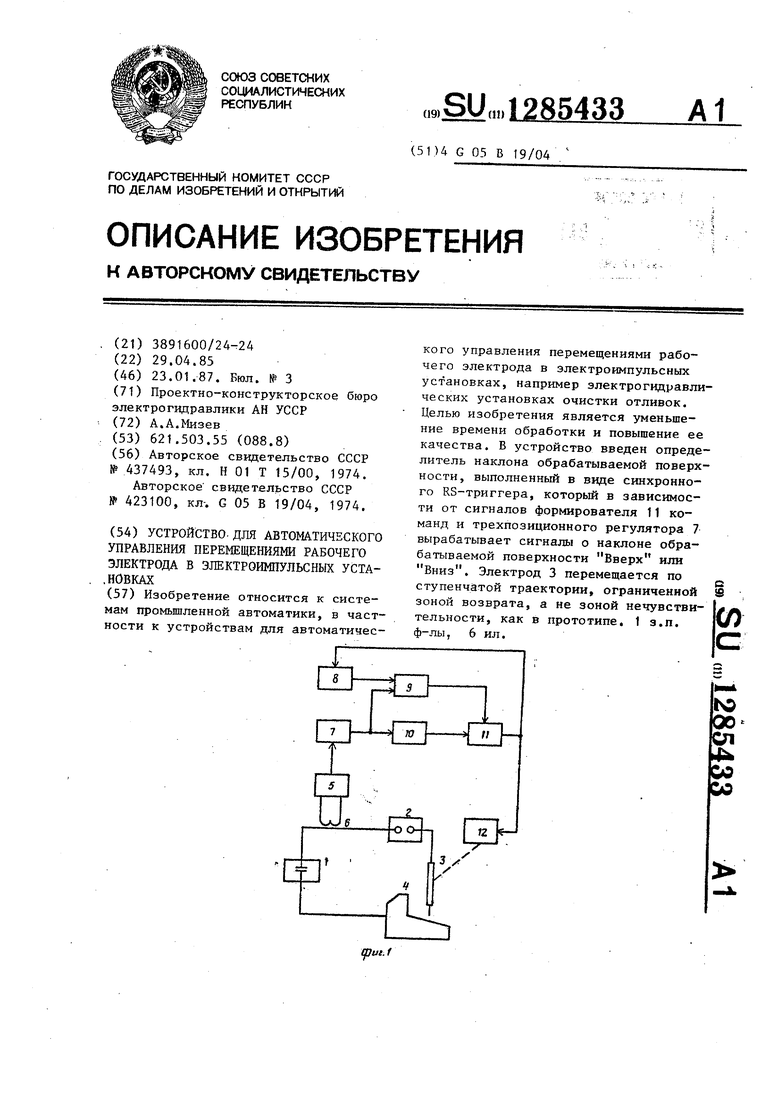
HUH
HOIK
Vuzf
Редактор А.Козориз
Составитель А.Исправникова
Техред Л.Сердюкова Корректор И. Муска
Заказ 7642/49 Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г,. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 437493, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯПЕРЕМЕЩЕНИЯМИ РАБОЧЕГО ЭЛЕКТРОДАВ ЭЛЕКТРОИМПУЛЬСНЫХ УСТАНОВКАХ | 1972 |
|
SU423100A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
