1
Изобретение относится к области управления позиционными механизмами и может быть использовано, например, для точного останова и контроля в заданной позиции механизма поворотной колонны передаточного бокса ядерного реактора на быстрых нейтронах.
Известна система управления позиционным механизмом, например, механизмом поворотной колонны передаточного бокса ядерного реактора на быстрых нейтронах, с двумя группами точек наведения, на одну из которых механизм наводится только при движении вперед, а на другую - при движении назад, с односторонним подходом без перебега за точку останова, содержащая реверсивный электродвигатель с переключателем его на малую скорость для точной остановки и выключателем, источник тормозного тока неподвижные Ш-образные индуктивные датчики, установленные в точках наведения и обмотки которых подключены к схеме включения датчиков через логические элементы ИЛИ и И, ферромагнитный якорь, разделенный на несколько частей, перемещающийся вместе с механизмом.
Однако в известной системе унравления позиционным механизмом при формировании сигнала точного наведения используется сигнал направления движения механизма вперед
или назад, что не позволяет производить наведение на одну и ту же точку нри подходе механизма к последней с разных сторон, кроме того конструкция якоря сложна и не имеет достаточной жесткости.
Цель изобретения - обеспечить точное наведение механизма.
Достигается это тем, что якорь выполнен в виде двух одинаковых частей с длиной каждои части больше тормозного пути механизма, причем одна часть перекрывает средний и один из крайних стержней Ш-образного датчика, другая - средний н другой крайний стержни, а воздушный зазор между частями
якоря равен требуемой зоне точного останова, а выход логического элемента ИЛИ подключен к источнику тормозного тока и переключателю на малую скорость, логический элемент И при этом подключен к выключателю электродвигателя.
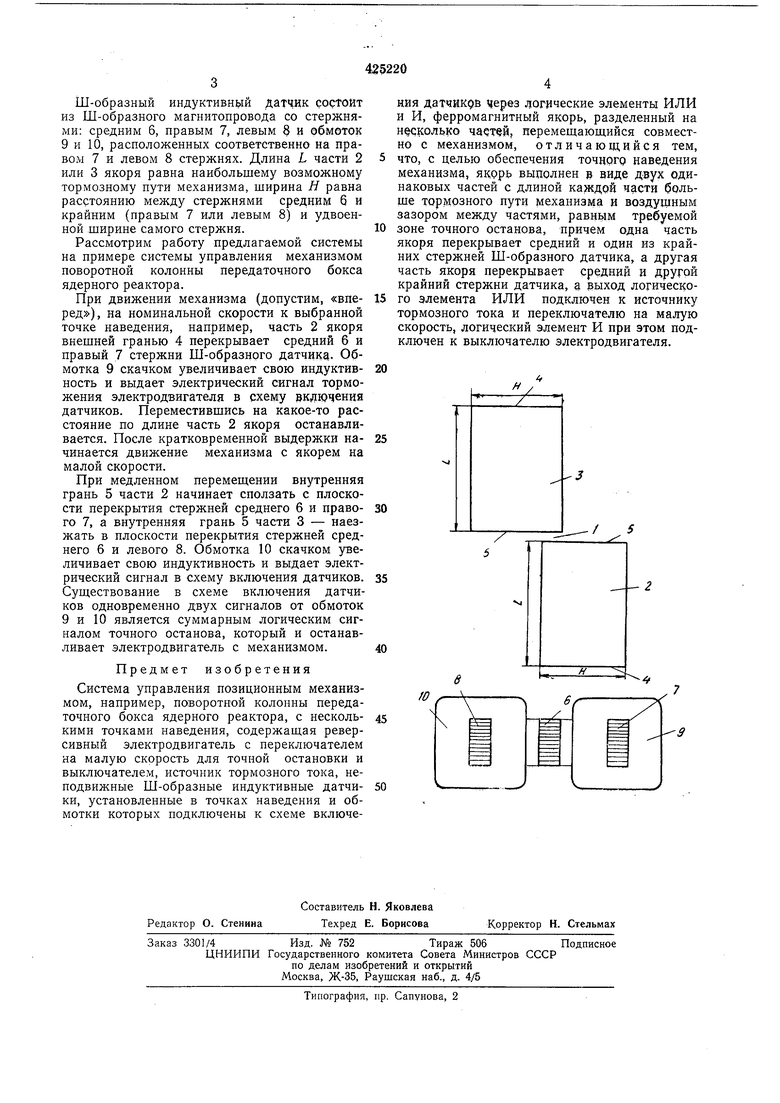
Пример выполнения элементов системы приведен на чертеже, где изображен ферромагнитный якорь и Ш-образный индуктивный датчик.
Якорь разделен воздушным зазором 1 на
две одинаковые нрямоугольной формы части 2
и 3, каждая из которых имеет внешнюю грань
4 н внутреннюю грань 5. Части 2 и 3 якоря
имеют длину L и ширину Н. Ш-образный индуктивный датчик состоит из Ш-образного магнитопровода со стержнями: средним 6, правым 7, левым 8 и обмоток 9 и 10, расположенных соответственно на правом 7 и левом 8 стержнях. Длина L части 2 5 или 3 якоря равна наибольшему возможному тормозному пути механизма, ширина Н равна расстоянию между стержнями средним 6 и крайним (правым 7 или левым 8) и удвоенной ширине самого стержня.10 Рассмотрим работу предлагаемой системы на примере системы управления механизмом поворотной колонны передаточного бокса ядерного реактора. При движении механизма (допустим, «впе- 15 ред), на номинальной скорости к выбранной точке наведения, например, часть 2 якоря внешней гранью 4 перекрывает средний 6 и правый 7 стержни Ш-образного датчика. Обмотка 9 скачком увеличивает свою индуктив- 20 ность и выдает электрический сигнал торможения электродвигателя в схему включения датчиков. Переместившись на какое-то расстояние по длине часть 2 якоря останавливается. После кратковременной выдержки на- 25 чинается движение механизма с якорем на малой скорости. При медленном перемещении внутренняя грань 5 части 2 начинает сползать с плоскости перекрытия стержней среднего 6 и право- 30 го 7, а внутренняя грань 5 части 3 - наезжать в плоскости перекрытия стержней среднего 6 и левого 8. Обмотка 10 скачком увеличивает свою индуктивность и выдает электрический сигнал в схему включения датчиков. 35 Существование в схеме включения датчиков одновременно двух сигналов от обмоток 9 и 10 является суммарным логическим сигналом точного останова, который и останавливает электродвигатель с механизмом.40 Предмет изобретения Система управления позиционным механизмом, например, поворотной колонны передаточного бокса ядерного реактора, с несколь- 45 кими точками наведения, содержащая реверсивный электродвигатель с переключателем на малую скорость для точной остановки и выключателем, источник тормозного тока, неподвижные Ш-образные индуктивные датчи- 50 ки, установленные в точках наведения и обмотки которых подключены к схеме включения датчиков через логические элементы ИЛИ и И, ферромагнитный якорь, разделенный на нес солько частей, перемещающийся совместно с механизмом, отличающийся тем, что, с целью обеспечения точногр наведения механизма, якорь выполнен в виде двух одинаковых частей с длиной каждой части больще тормозного пути механизма и воздущным зазором между частями, равньш требуемой зоне точного останова, причем одна часть якоря перекрывает средний и один из крайних стержней Ш-образного датчика, а другая часть якоря перекрывает средний и другой крайний стержни датчика, а выход логического элемента ИЛИ подключен к источнику тормозного тока и переключателю на малую скорость, логический элемент И при этом подключен к выключателю электродвигателя. в fO -
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОЗИЦИОННЫМ МЕХАНИЗМОМ | 1973 |
|
SU395905A1 |
| Путевой выключатель | 1977 |
|
SU681472A1 |
| Бесконтактный путевой выключатель | 1974 |
|
SU525991A1 |
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОГЛОЩАЮЩЕГО СТЕРЖНЯ В АКТИВНОЙ ЗОНЕ РЕАКТОРА | 2013 |
|
RU2540441C2 |
| Путевой выключатель | 1972 |
|
SU490202A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТ ВЕРТИКАЛИ | 2012 |
|
RU2494344C1 |
| ПРИВОД СТЕРЖНЯ АВАРИЙНОЙ ЗАЩИТЫ | 2013 |
|
RU2566299C2 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2000 |
|
RU2168258C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1998 |
|
RU2129495C1 |
| Устройство для точного останова электропривода | 1978 |
|
SU921007A1 |
