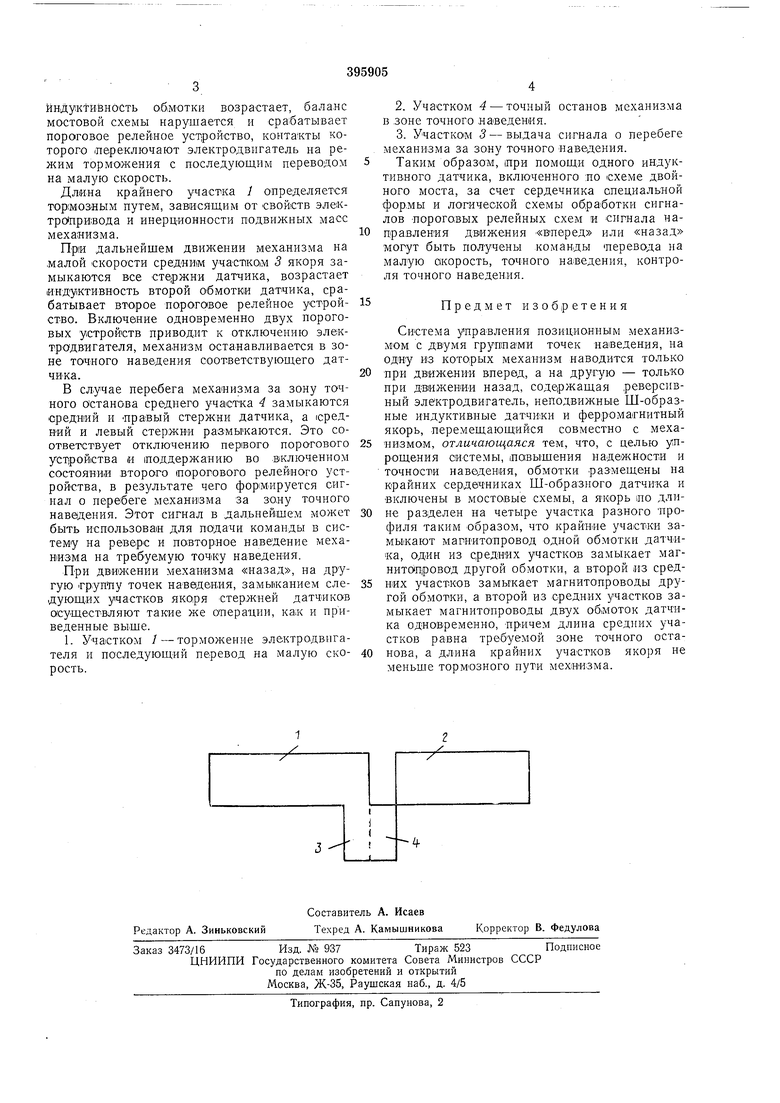
Изобретение относится к управлению позиционными механизмами и может быть использовано, например, для точного останова и контроля в заданной позиции механизма поворотной колонны передаточного бокса ядерного ipeaiKTOpa на быстрых нейтронах. Известны системы управления позиционными механизмами с дв|умя группами точек наведения, на одну из которых механизм наводится только 1при движении вперед, а на другую - при движении назад, с односторонним подходом без перебега за точку остаяова, содержащие реверсивный электродвигатель с переводом его на малую скорость для точной остановки, неподвижные Ш-образные индуктивньге датчики и ферромагнитный якорь, перемещающийся совместно с механизмом. В та-ыих системах от одного датчика поступает сигнал перевода двигателя на малую скорость, от другого датчика - последующий сигнал точного останова механизма. Однако, поскольку известные системы каждой точки наведения имеют два датчика, установ1ка их часто бывает неприемлема по условиям компоновки механизма. Кроме того, имеется значительная зона точного останова. Так для ЗО.НЫ точного останова ±1 , с целью исключения возможности выдачи ложных сигналов, необходимая ширина якоря н ширина стержня датчика должны быть не более 0,7 мм, что по конструктивным н технологическим соображения невыполнимо. Целью изобретения является упрощение системы, повыщенне надежности и точности наведения. Для этого обмотки размещены на крайних сердечниках Ш-образного датчика и в ключены в мостовые схемы, а якорь ио длине разделен на четыре участка разного ерофлитя таким образом, что крайние участки за мыкают магнитопровад одной обмотки датчика, один из средних участков замыкает магнитопроводы другой обмотки, а второй из средних участков за1мыкает магнитопроводы , двух обмоток датчпка одновременно, причем длина средних участков равна требуемой зоне точного останова, а длина крайних участков якоря не меньше тормозного пути механизма. На чертеже приведена схема конструкции якоря. Якорь содержит крайние участки /, 2 и средние участки 3, 4, причем все участки укреплены на общей ллате из немагнитного материала. Система работает следующим образом. При движениИ механизма Еперед и при подходе поворотной колонны на номипалько скорости к рассматриваемой точке наведения крайним участком / якоря замьиоются средний и левый стержни Ш-образ Ого датчика.
йндуктивноСть об|МОтки возрастает, баланс мостовой схемы нарушается и срабатывает пороговое релейное устройство, контакты которого (Переключают электродвигатель на режим торможения с последующим переводом на малую скорость.
Длина крайнего участка 1 Определяется тормозным путем, зависящим от свойств электропривода и инерционности подвижных масс мехаетизма.
При дальнейшем движении механизма на малой скорости средним участ1КО|М 3 якоря замыкаются все стержни датчика, возрастает индуктивность второй обмотки датчика, срабатывает второе пороговое релейное устройство. Включение одновременно двух пороговых устройств приводит к отключению электродвигателя, механизм останавливается в зоне тачного наведения соответствующего датчика.
В случае перебега механизма за зону точного останова среднего участка 4 замыкаются средний и Правый стержни датчика, а средний и левый стержни размыкаются. Это соответствует отключению первого порогового уст)ройства и поддержанию во включенном состоянии второго (порогового релейного устройства, в результате чего формируется сигнал о перебеге механи1зма за зону точного наведения. Этот сигнал в дальнейщем может быть использован для подачи команды в систему на реверс и повторное наведение механизма на требуемую точку наведения.
При движении механизма «назад, на другую группу точек наведения, замыканием еледующих участков якоря стержней датчиков асуществляют такие же операции, ка.к и приведенные выще.
1. Участком / - торлюжение электродвигателя и последующий перевод на малую скорость.
2.Участком 4 - точный останов механизма в .зоне точного .наведения.
3.Участком 3 - выдача сигнала о перебеге механизма за зону точного наведения.
Таким образом, лри помощи одного индуктивного датчика, включенного :по схеме двойного моста, за счет сердечника специальной фор,мы и логической схемы обра|ботки сигналов норого;вых релейных схем и сигнала направления движения «Вперед или «назад могут быть получены команды перевода на малую скорость, точного наведения, контроля точного наведения.
Предмет изоб|ретения
Система управления позиционным механизмом с двумя группами точек на1ведения, на одну из которых механизм наводится только при движении вперед, а на другую - только при движении назад, соде1ржащая реверсивный электродвигатель, неподвижные Ш-образные индуктивиые датчики и ферромагнитный якорь, перемещающийся совместно с механизмом, отличающаяся тем, что, с целью упрощения системы, 1по;вышения надежности и точности наведения, обмотки размещены на крайних сердечниках Ш-образного датчика и включены в мостовые схемы, а якорь по длин-е разделен на четыре участка разного профиля таким образом, что крайние участки замыкают магнитопровод одной обмотки датчика, один из средних участков замыкает магнитЬцровад другой обмотки, а второй из средних участков замыкает магнитопроводы другой обмотки, а второй из средних участков замыкает магнитопроводы двух обмоток датчика одновременно, причем длииа средних участков равна требуемой зоне точного останова, а длина крайних участков якоря не меньше тормозного пути мехнизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПОЗИЦИОННЫМ МЕХАНИЗМОМ | 1972 |
|
SU425220A1 |
| Путевой выключатель | 1972 |
|
SU490202A1 |
| Путевой выключатель | 1977 |
|
SU681472A1 |
| Бесконтактный путевой выключатель | 1974 |
|
SU525991A1 |
| Устройство для контроля положения подвижных объектов | 1954 |
|
SU100915A1 |
| Устройство для полуавтоматического управления моторным вагоном, в частности, троллейбусом | 1945 |
|
SU68230A1 |
| Индуктивный датчик перемещений | 1979 |
|
SU870921A1 |
| Электропривод переменного тока со встроенным тормозом | 1986 |
|
SU1374387A1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006144C1 |
| ПРИБОР ДЛЯ ИСПЫТАНИЯ ТКАНЕЙ НА СДВИГ | 1973 |
|
SU382954A1 |
