(54) УСТРОЙСТВО ДЛЯ ТОЧНОГО ОСТАНОВА ЭЛЕКТРОПРИВОДА
, 1 . , Изобретение относится к электротехнике и может быть использовано а электроприводах общепромышленных механизмов.. . Л
Известно устройство для управления электроприводом, содержащее асинхронный электродвигатель, обмотка статора которого подключена к ис фчнику питания через тиристорный коммутатор, блок управления тнристорвым коммутатором, . датчик исла o6oj)OTOfi и датчик скорости вращения по валу электродвигателя, счетчик числа оборотов электродвигателя, подключенный входом к датчик числа оборотов,, блок начала торможения; один вход которого соединен с выходом счетчика числа оборотов, другой вход соединен с выходом датчика скорости, а аыход соединен с блоком управления. И&в стHofe устройство позволяет 1фоиэ9одй1:ь точную остановку электропризода S заданной точке пройденного пути.
Однако устройство характеризуется сложностью системы управления.
Наиболее близким к изобретению по технической сущности является усяройство для точного останова электропривода, содержащее асинхронный электродвигатель, обмотка статора
которого подключена кисточнику переменного TOica через первый ком- , мутатор, трансформатор, первичнгш обмотка которого подключена к источнику переменного тока через второй комкутатор, а вторичная обмотка подключена к обмотке статора электродвигателя через третий коммутатор, источник постоянного тока, один
10 выход которого соединен с нулевой точкой вторичной обмотки трансформатора, а другой выход соединен с обмоткой статора через четвертый коммутатор,датчики предварительной
15 и точной ориентации, связанные с. валом электродвигателя, командоаппарат, блок управления коммутаторами, один вход которого соединен с выходом командоаппа ата,«второй вход
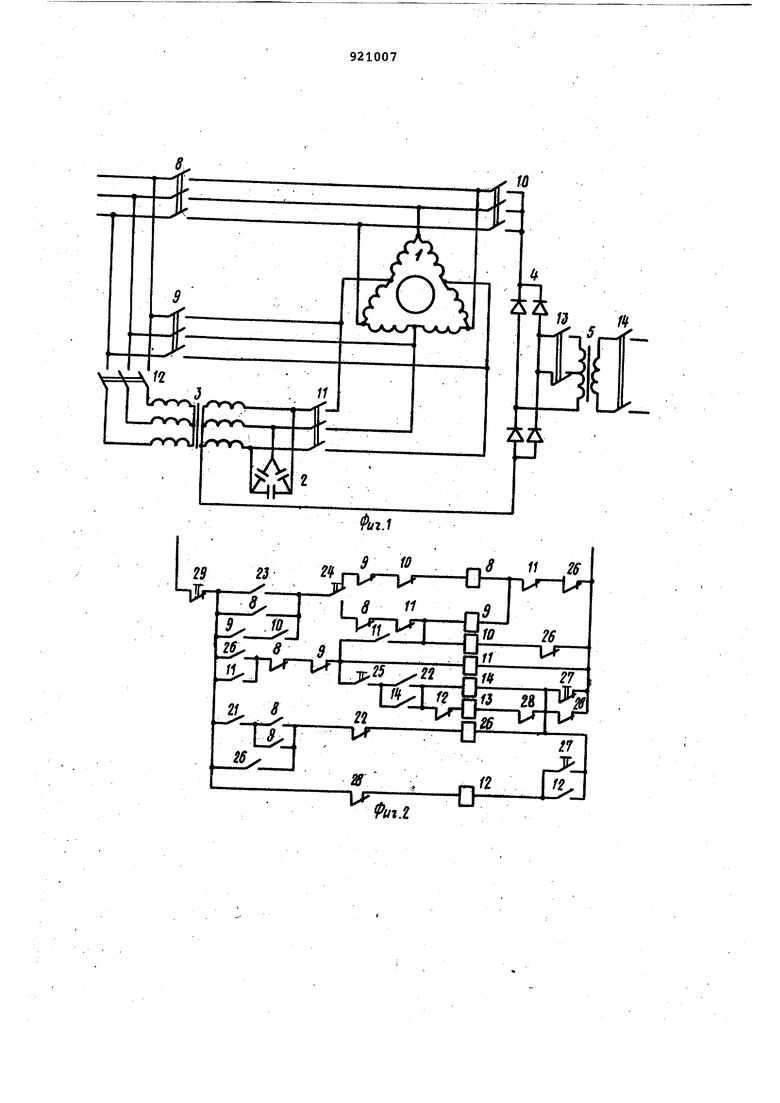
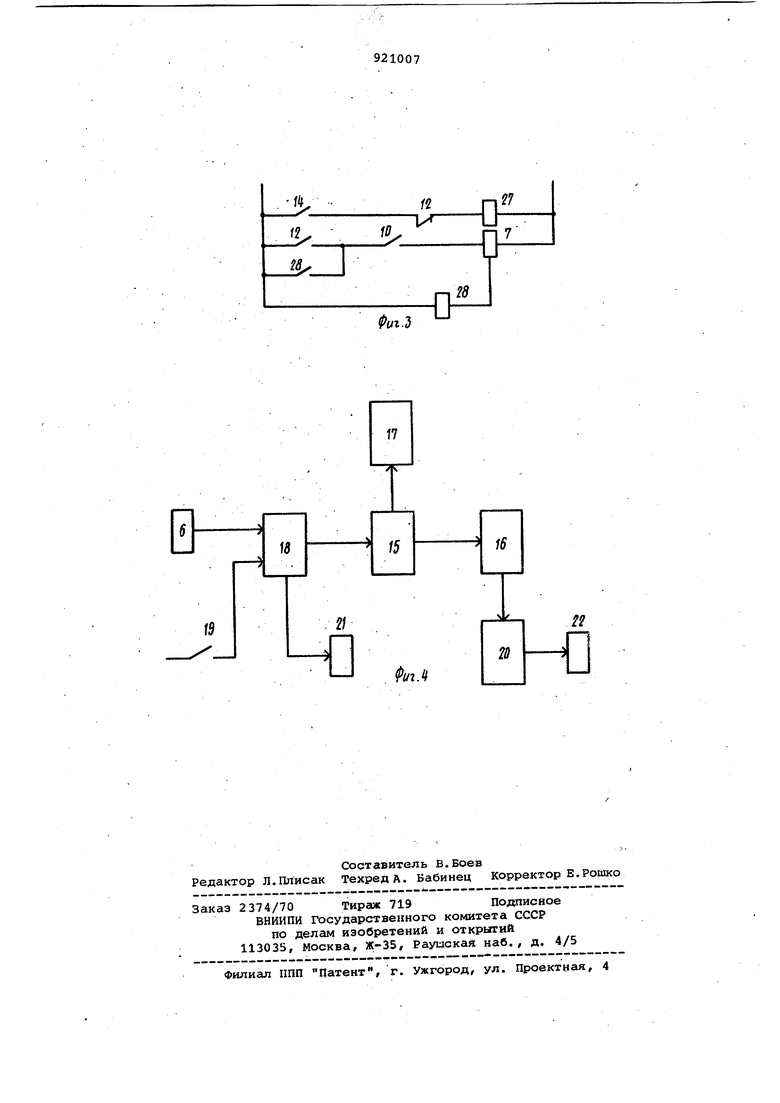
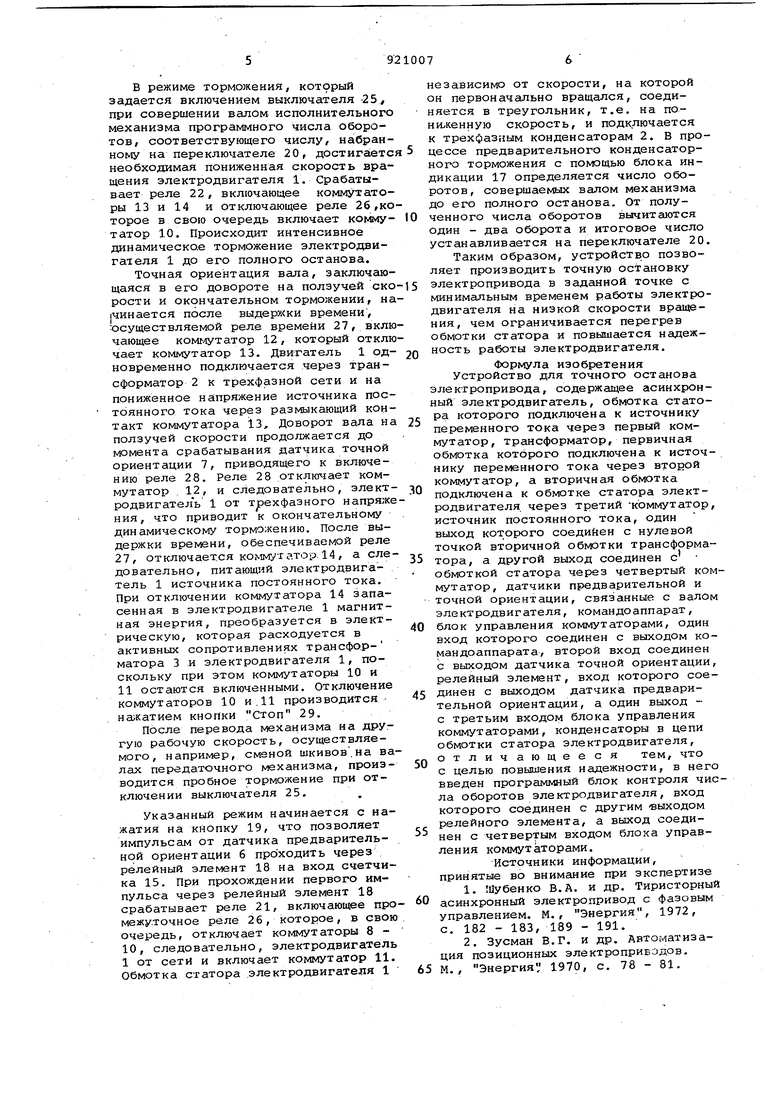
20 соединен с выходом датчика точной ориентации,релейный элемент, вход которого соединен с выходом датчика предварительной ориентации, а выход - с третьим входом &)1ока управления К01ф|утаторг1ми, конденсаторы в цепи обмотки статора электродвигателя {2. Недоста.тком этого устройства является низкая его надежность в связи с тем, что при торможении электродвигателя не контролируется тормозной путь электропривода и поэтом после торможения для точной останов электродвигатель длительное время р ботает на низкой скорости вращения при питании его постоянным и переме ным током, что приводит, к перегреву обмотки статора. Цель изобретения - повьпление надежности работы устройства. Эта цель достигается тем, что в устройство для точного останова эле ропривода дополнительно введен программный блок контроля числа оборотов электродвигателя, вход которого соединен с другим выходом релейного элемента/ а выход соединен с четвер тым входом блока управления комгиута торами. На фиг. 1 показана схема силовой части устройства; на фиг. 2 и 3 схемы блока управления} на фиг. 4 схема программного блока контроля числа оборотов. Устройство для точного ост-анова электропривода содержит трехфаз ый двухскоростной асинхронный электродвигатель 1, конденсаторы 2, трехфазный трансформатор 3, источник постоянного тока, выполненный в виде однофазного в.ыпрямительного моста 4 входом подключенного к трансформато ру 5, датчики предварительной -ориен тации 6 и точной ориентации 7,расположенные на валу . исполнительного механизма, коммутатор 8, подключающий обмотку статора электродвигате ля 1 к источнику перег/юнного тока на большее число полюсов,и коммутаторы 9 и 10 - на меньшее число полюсов, конденсаторы 2 и вторичная обмотка трансформатора 3 подключены к абмотке статора электродвигателя 1 через коммутатор 11, первичная обмотка трансформатора 3 подключена к источнику переменного тока через ком мутатор 12. Один вывод выпрямительного моста 4 подключен к нулевой точ ке вторичной обмотки Трансформатора 3, а другой вывод подключен к обмотке статора электродвигателя 1 через коммутатор 10. Коммутатор 13, соединяющий вторичную обмотку трансформатора 5, со входом выпрямительного мос та 4, изменяет коэффициент трансформации трансформатора 5, первичная обмотка которого подключена к источнику переменного тока через коммутатор 14. Программный блок контроля числа оборотов состоит иэ последовательно соединенных счетчика импульсов 15 и дешифратора 16, причем к выходу счетчика импульсов подключен блок индикации 17, а ко входу один выход релейного элемента 18, входы которого подключены к датчику предварительной ориентации б и к замыка ощему контакту кнопки 19. Устройство содержит переключатель 20 и реле 21, подключенное к другому выходу релейного элемента 18, реле 22, подключенное к выходу переключателя 20. Блок управления коммутаторагли содержит последовательно соединенные кнопку Пуск 23 и переключатель 24, выключатель 25, промежуточное реле 26, реле времени 27, подключенное к источнику питания через последовательно соединенные замыкающий контакт коммутатора 14 и размыкающий контакт коммутатора 12, промежуточное реле 28, подключенное к выходу датчика точной ориентации 7, соединенного с источником питания через последовательно соединенные замыкающие контакты коммутаторов 10 и 12, управляющий вход компараторов 8-10 подключен к источнику питания через переключатель 24 свои блокировочные размыкающие контакты и размыкающий контакт промежуточного реле 26, катушка которого подключена к ис- . точнику питания через последовательно соединенные замыкающие контакты реле 21 и коммутаторов 8 и 9, размыкающий контакт реле 22, управляющий вход коммутатора 11 подключен к источнику питания через последовательно соединенные размыкающие контакты коммутаторов 8 и 9 и загуыкающие контакты 26 и 11, а управляющий вход коммутаторов 13 и 14 соединен с выключателем 25 ч-ёрез размыкающие контакты промежуточного реле 28 и реле времени 27, замыкающий контакт реле 22 и разглыкаюхдай контакт коммутатора 12, управляющий вход которого подключен к источнику питания через размыкающий контакт промежуточного реле 28, замыкающий контакт реле времени 27 и контакт коммутатора 12. Кнопка Стоп 29 подключена к цепи источника питания блока управления коммутаторами. Работает устройство следующим образом. Включение электродвигателя 1 производится нажатием кнопки.Пуск 23 и, в зависимости от положения переключателя 24, срабатывает коммутатор 8 или 9 и 10, подключая обмотку статора с соответст,вующи.м числом полюсов к источнику переменного тока. Предварительное торможение привода начинается с момента поступления первого импульса на счетчик числа оборотов. Срабатывает реле 21 и коммутатор 11, и происходит подключение конденсаторов 2 к электродвигателю 1. В процессе предварительного торможения дискретно контролируются угловое положение и число оборотов выходного, вала исполнительного механизма с помощью датчика предварительной ориентации б и программного счетчика числа оборотов. В режиме торможения, который задается включением выключателя -25, при совершении валом исполнительног механизма программного числа оборотов, соответствующего числу, набран ному на переключателе 20, достигает необходимая пониженная скорость вра щения электродвигателя 1. Срабатывает реле 22 , включающее коммутато ры 13 и 14 и отключающее реле 26,к торое в свою очередь включает комму татор 10, Происходит интенсивное динамическое торможение электродвигателя 1 до его полного останова. Точная ориентация вала, заключаю щаяся в его довороте на ползучей ск рости и окончательном торможении, н |чинается после выдержки времени , :осуществляемой реле времени 27, вкл чающее комг татор 12, который отклю чает коммутатор 13. Двигатель 1 од новременно подключается через трансформатор 2 к трехфазной сети и на пониженное напряжение источника постоянного тока через размыкающий контакт коммутатора 13, Доворот вала на ползучей скорости продолжается до момента срабатывания датчика точной ориентации 7, приводящего к включению реле 28. Реле 28 отключает коммутатор 12, и следовательно, элект родвигатель 1 от трехфазного напряже ния, что приводит к окончательно1«1У динамическому торможению. После выдержки времени, обеспечиваемой реле 27, отключается коммутатор. 14, а сле довательно, питающий электродвигатель 1 источника постоянного тока. При отключении коммутатора 14 запасенная в электродвигателе 1 магнитная энергия, преобразуется в электрическую, которая расходуется в активных сопротивлениях трансфо.рматора 3 и электродвигателя 1, поскольку при этом коммутаторы 10 и 11 остаются включенными. Отключение коммутаторов 10 и.11 производится на;катием кнопки Стоп 29. После перевода механизма на другую рабочую скорость, осуществляемого, например, сменой шкивов , на ва лах передаточного механизма, производится пробное торможение при отключении выключателя 25. Указанный режим начинается с нажатия на кнопку 19, что позволяет импульсам от датчика предварительной ориентации 6 проходить через релейный элемент 18 на вход счетчика 15. При прохождении первого импульса через релейный элемент 18 срабатывает реле 21, включающее про межуточное реле 26, которое, в свою очередь, отключает коммутаторы 8 10, следовательно, электродвигатель 1 от сети и включает коммутатор 11. Обмотка статора электродвигателя 1 независимо от скорости, на которой он первоначально вращался, соединяется в треугольник, т.е. на пони-кенную скорость, и подключается к трехфазным конденсаторам 2. В процессе предварительного конденсаторного торможения с помощью блока индикации 17 определяется число оборотов, совершаемых валом механизма до его полного останова. От полученного числа оборотов вычитаются один - два оборота и итоговое число устанавливается на переключателе 20. Таким образом, устройство позволяет производить точную остановку электропривода в заданной точке с минимальным временем работы электродвигателя на низкой скорости вращения, чем ограничивается перегрев обмотки статора и повышается надежность работы электродвигателя. Формула изобретения Устройство для точного останова электропривода, содержащее асинхронный электродвигатель, обмотка статора которого подключена к источнику переменного тока через первый коммутатор, трансформатор, первичная обмотка которого подключена к источнику переменного тока через второй коммутатор, а вторичная обмотка подключена к обмотке статора электродвигателя через третий коммутатор, источник постоянного тока, один выход которого соединен с нулевой точкой вторичной обмотки трансформатора, а другой выход соединен с обмоткой статора через четвертый коммутатор, датчики предварительной и точной ориентации, связанные с валом электродвигателя, командоаппарат, блок управления коммутаторами, один вход которого соединен с выходом командоаппарат а, второй вход соединен с выходом датчика точной ориентации, релейный элемент, вход которого соединен с выходом датчика предварительной ориентации, а один выход с третьим входом блока управления коммутаторами, конденсаторы в цепи обмотки статора электродвигателя, отличающееся тем, что с целью повышения надежности, в него введен программный блок контроля числа оборотов электродвигателя, вход которого соединен с другим выходом релейного элемента, а выход соединен с четвертым входом блока управления коммутаторами. Источники информации, принятые во внимание при экспертизе 1.Шубенко В.А. и др. Тиристорный асинхронный электропривод с фазовым управлением. М., Энергия, 1972, с. 182 - 183, 189 - 191. 2.Зусман В.Г. и др. Автоматизация позиционных электропривэдов. М. , Энергия; 1970, с. 78 - 81. 8 11 у-и-ПхГ 26
м
ffl
Фиг Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2002 |
|
RU2227364C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2003 |
|
RU2242082C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРОПРИВОД | 2015 |
|
RU2586630C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
| Устройство для управления двухдвигательным электроприводом | 1982 |
|
SU1053245A1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ И ЗАЩИТЫ ЭЛЕКТРОПРИВОДА НА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЯХ | 1998 |
|
RU2139626C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОЦЕССОМ ВИБРОФОРМОВАНИЯ ЯЧЕИСТОБЕТОННОЙ СМЕСИ | 1992 |
|
RU2027589C1 |