Изве.стное устройство контроля работы уборочной машины, содержащее датчик продуктивности работы уборочной машины, показывающий прибор или телеметрическое передающее устройство, позволяет контролировать только некоторые параметры работы отдельных рабочих органов и двигателя (скорость вращения валов, работоспособность шнеков, элеваторов, давление и температура масла).
Цель изобретения - получение объективной и опе|рати1вной информации об эффективно.сти работы уборочной машины - достигается (Введением в устройство контроля сумматора, .подключенного одним из входов к датчику лродуктивно.сти работы уборочной машины, и блока измерения темиа обработки еднн1ицы ,убираемой площади, подключаемого к другому входу сумматора, выход которого связан с показыв ающи1М прибором или телеметриче.ским передающим устройством.
Блок измерения темпа обработки единицы убираемой площади обычно выполняют в виде счетчиков импульсов, подключаемых поочередно и в противофазе к дешифратору, соединенному с положительным входом сумматора, либо в виде интеграторов, подключаемых поочередно и в противофазе к источнику постоянного сигнала на входе и к отрицательному входу сумматора на выходе. В последнем случае блок измерения темпа обработки единицы убираемой площади может состоять, например, из двух пневматических емкостей, подключаемых на входе поочередно и в противофазе к сумматору и повторителю со сдвигом, шунтированному постоянным -пневматическим сопротивлением.
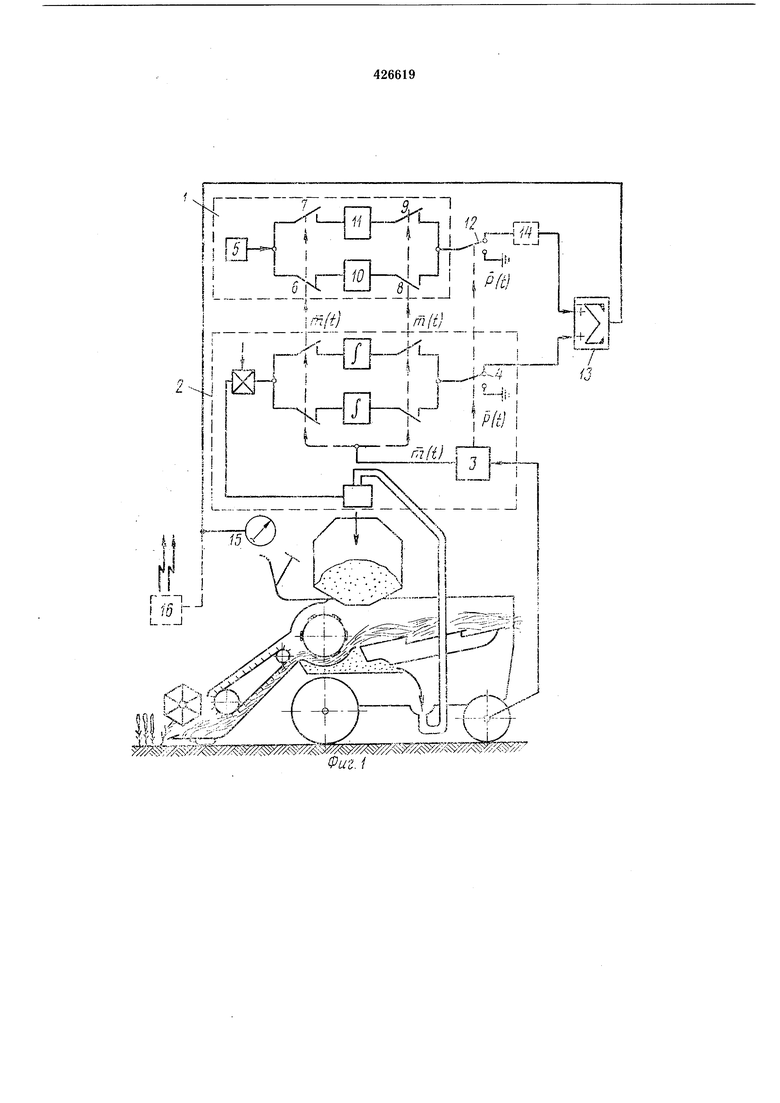
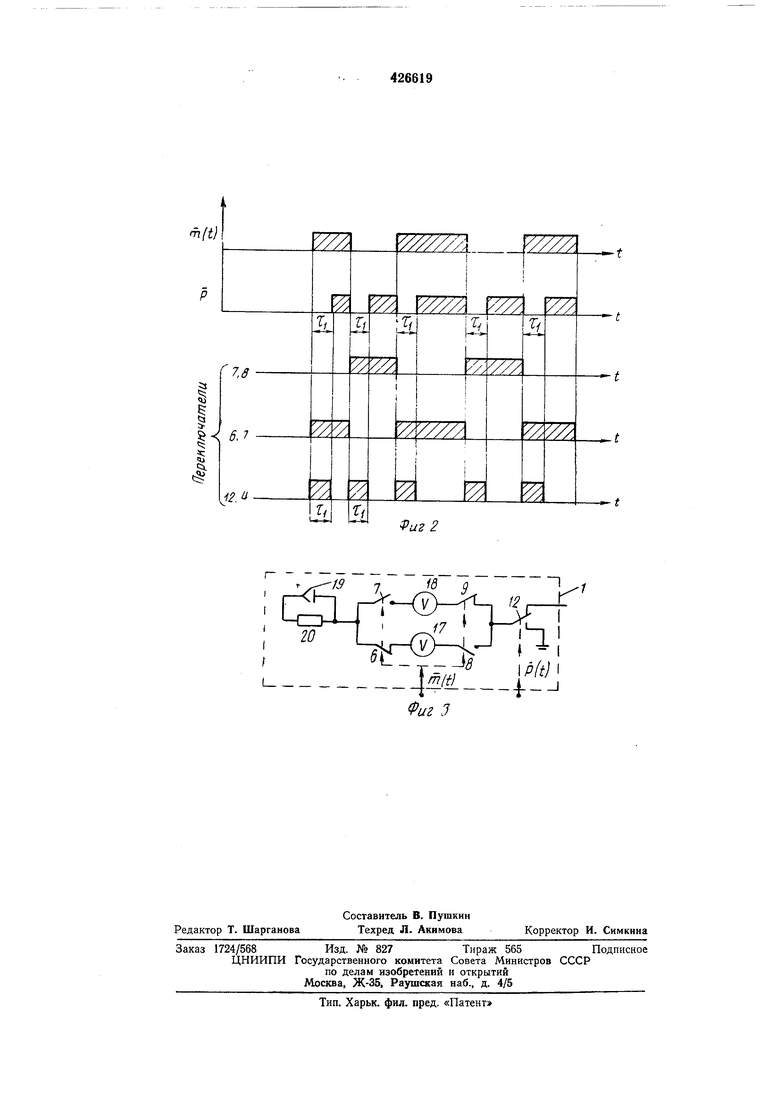
На фиг. 1 изображено предлагаемое устройство контроля работы уборочной машины; на фиг. 2 - диаграмма работы переключателей и на фиг. 3 - блок измерения темпа обработки единицы убираемой площади.
Устройство содержит блок 1 измерения
темпа обработки единицы убираемой площади
и датчик 2 цродуктивности уборочной машины,
в состав которого входят формирователь 5
командных импульсов и переключатель 4.
Блок 1 измерения темпа.обработки единицы убираемой площади содержит источник 5 эталонного сигнала, переключатели 6-9 и интеграторы или счетчики импульсов 10 и //. В том случае, когда в блоке / применяют интеграторы, источник 5 формирует сигнал постоянной величины. Если в блоке / используют счетчики импульсов, то источник 5 генерирует импульсы постоянной частоты.
Переключатель 12 соединяет блок / с сумматором 13 непосредственно или через дешифратор 14, который применяют в том случае, когда в блоке 1 используют счетчики импульсов и темп определяется по величине средней
скорости обработки участка поля заданной площади. Сумматор 13 на выходе подключен к показывающему прибору 15, а п.ри необходимости передачи сигнала на значительное расстояние - к телеметрическому передающему устройству 16.
Переключатели 6-9 управляются командными импульсами m(t}, поступающими от формирователя 3 им1пульсов.
Переключатель 12 управляется командными им:пульсами P(t), поступающими также от формирователя 3.
За время действия импульса m(t) переключатель 12 подключает блок / к сумматору 13 на время, необходимое для считывания сигнала от интегратора, который в данный период отключен от источника 5. По окончании СЧИтывания переключатель 12 разряжается. То же происходит и при снятии импульса P(t). Таким образом, интеграторы всегда оказываются в разряженном состоянии к моменту их подключения к источнику 5.
Интеграторы 10 и 11 поочередно подключаются к источнику 5 эталонного сипнала. Время подключения равно длительности командных импульсов m(t). Их ширина и промежуток между ними равны времени прохождения заданного отрезка пути, т. е. времени обработки одинаковых по площади участков убираемого поля. Поскольку каждый из интеграторов к моменту подключения к источнику 5 приводится в исходное состояние, т. е. полностью разряжается, то величины сигналов на выходе каждого из интеграторов в момент отключения от источников 5 будут пропорциональны времени, затраченному на обработку участков поля одинаковой площади.
Предлагаемое устройство работает следующим образом.
В поступления командного импульса m,(t) переключатели 6-9 и 12 находятся в положении, показанном на фиг. 1.
За время действия импульса m(t) интегратор 10 подключается к источнику 5 эталонного сигнала и отключается от переключателя 12, а и-нтегратар 10 отключается от источника 5 и подключается к переключателю 12.
На выхюде интегратора 10 сигнал будет линейно возрастать и к моменту снятия импульса m(t) будет пропорционален его длительности, а, следовательно, и времени обработки участка поля заданной площади.
Переключатель 12 в течение некоторого времени т, необходимого для считывания сигнала, будет соединять интегратор 11 с отрицательным выходом сумматора 13, а затем с «землей, для того чтобы к моменту окончания действия командного импульса tn(t) иетегратор // был разряжен, т. е. возвращен в исходное положение. В течение того же промежутка времени, при котором интегратор 11 оказывается подклю ченным к отрицательному входу сумматора 13, к положительному входу
этого сумматора с помощью переключателя 4 подключается датчик 2 продуктивности.
После отключения сумматора 13 от интегратора // и датчика 2 продуктивности на его
выходе, а следовательно, и на показывающе.м приборе, будет сохраняться сигнал, равный алгебраической сумме сигналов, которые были на выходе интегратора // и датчика 2 продуктивности в момент подачи импульса tn(t. Как только импульс m(t) будет снят, состояние переключателей 6-9 изменится на обратное, а переключатель 12 займет исходное ноложение, соединив блок 1 с сумматором 13. Интегратор // будет подключен к источнику 5 н отключен от переключателя 12, а интегратор 10 будет отключен от источника 5 и подключен к переключателю 12. Поскольку последний в начальный момент после снятия
0 импульса m(t) будет соединен на время т с сумматором 13, то сигнал интегратора, пропорциональный длительности импульса m(t), поступит на сумматор 13. Одновременно с этим и в течение времени т на другой вход
5 сумматора поступит сигнал от датчика 2 эффективности и сигнал на выходе сумматора будет равен разности сигналов датчика 2 эффективности и блока 1, сформированных за время действия импульса m(t}.
После считывания сигнала с интегратора 10 переключатель 12 отключается от сумматора 13 и соединяет интегратор 10 с «землей до возникновения очередного импульса m(t. Инте ратор // во время отсутствия импульса т (t) будет подключен к источнику 5. Поскольку интервалы между появлениями импульсов m(t) также равны времени обработки очередного участка поля заданной величины, то к моменту появления следующего импульса m(i) на выходе интегратора 11 будет сигнал, пропорциональный времени обработки очередного участка поля.
При поступлении очередного импульса т()
переключатели 6-9 и 12 будут в положении, показанном на фиг. 1, и описанный процесс действия устройства повторится.
Таким образом, сигнал на выходе сумматора 3, а, следовательно, и на показывающем приборе 15 будет меняться дискретно и только в момент появления или снятия командного имлульса m(t). Величина его будет пропорциональна продуктивности и темпу обработки убираемой площади. Чем больще сбор убираемого продукта с площади заданной величины и чем меньше затрачивается времени на обработку этой площади, тем больше будет эффективность работы уборочной мащины, что отразится на величине сигнала на выходе сумматора 13.
Когда в блоке / вместо интеграторов применяют счетчики импульсов, то в качестве исто шика 5 эталонного сигнала выбирают генератор импульсов постоянной частоты. Харак5тер работы переключателей 6-9 и 12 остается таким же, но в этом случае между сумматором 13 и переключателем 12 помещают дешифратор 14, который преобразовывает число импульсов, зафиксированное соответствующим счетчиком, в велич ину давления, прямо или обратно пропорциональную этому числу. В первом случае дещифратор подключается к отрицательному, а во втором - к положительному входу сумматора. Когда блок / содержит пневматические элементы, интеграторы выполняют в виде пневматических интегрирующих емкостей 17 и 18, а источник эталонного сигнала - в виде повторителя со сдв.игом 19, щунтированного сопротивлением 20. Поскольку повторитель со сдвигом обеспечивает на сопротивлении 20 постоянный перепад давления, то и расход воздуха через это сопротивление будет постоянным при подключении его к емкостям 17 и 18. Следовательно, давление воздуха в емкости за время ее подключения к источнику эталонного сигнала будет пропорционально этому времени, т. е. темпу обработки участка поля заданной величины. Предмет изобретения 1. Устройство контроля работы уборочной машины, содержащее датчик продуктивности работы уборочной мащины, показывающий
6 прибор или телеметрическое передающее устройство, отличающееся тем, что, с целью получения объективной и оперативной информации об эффектив1ности работы уборочной мащины, оно содержит сумматор, один из входов которого подключен к датчику продуктивности работы уборочной машины, а его выход связан с показывающим прибором или телеметрическим передающим устройством, и блок измерения темпа обработки единицы убираемой площади, подключенный к другому входу сумматора. 2.Устройство по п. 1, отличающееся тем, что блок измерения темпа обработки единицы убираемой площади выполнен в виде интеграторов, подключаемых .поочередно и в противофазе к источнику постоянного сигнала на входе и к отрицательному входу сумматора на выходе. 3.Устройство по п. 1, отличающееся тем, что блок измерения темпа обработки единицы убираемой площади выполнен в виде счетчиков импульсов, подключаемых поочередно и в противофазе к дещифратору, соединенному с положительным входом сумматора. 4.Устройство по л. 2, отличающееся тем, что блок измерения темпа обработки единицы убираемой площади вьтолнен в виде двух пневматических емкостей, подключаемых поочередно и в противофазе к сумматору и поворителю со сдвигом, шунтированному постоянным пневматическим сопротивлением.
-ф-ж
7шт /т//шш 7 Фиг. 1
I
15 t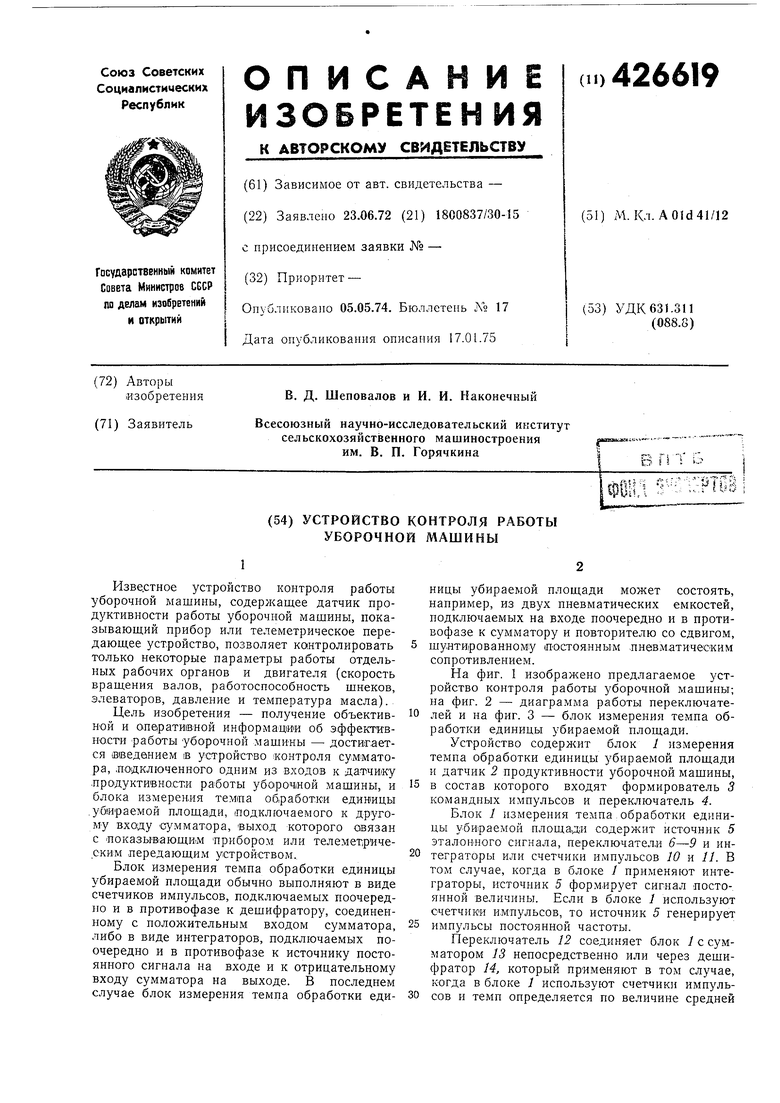
| название | год | авторы | номер документа |
|---|---|---|---|
| ВПТБ^.щгаэ1Ж | 1973 |
|
SU395041A1 |
| Устройство для управления @ -фазным реверсивным вентильным преобразователем | 1989 |
|
SU1837378A1 |
| УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ВЕЛИЧИН | 1971 |
|
SU293298A1 |
| Цифровой регулятор перемещения длинномерного материала в рабочую зону обрабатывающей машины | 1985 |
|
SU1274821A1 |
| Устройство для точного останова электропривода | 1984 |
|
SU1182618A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО РЕГУЛИРОВАНИЯ СКОРОСТИ ПРЕССОВАНИЯ НА ГИДРАВЛИЧЕСКОМ ПРЕССЕ | 1986 |
|
SU1415608A1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ПРОЦЕССОМ ЗЕРНОУБОРОЧНОЙ МАШИНЫ | 1973 |
|
SU383426A1 |
| Автоматический дозатор непрерывного действия | 1977 |
|
SU699333A1 |
| Устройство для точного останова электропривода | 1988 |
|
SU1614086A2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ АНАЛОГОВЫХ ОБЪЕКТОВ | 2004 |
|
RU2262128C1 |