1
Настоящее изобретение от1носнтся к области авто1мати.ческо1го управления и может быть применено для автоматизации металлорежущих станков.
Известна цифровая пневмогидравлическая программио-следящая система, .например, для позиционной обработки на металлорежущих ставках, содержащая считывающее устройство, блоки сравнения и управления скоростью движения .рабочего органа, каждый из которых соединен через соответствующие последователыно соединенные усилитель, пневмомеханический преобразователь и гидроусилитель с гидродвигателем, и датчики точного и грубого отсчета, соединенные через соответствующие логические преобразователи с входа1ми блока сравнения.
С целью повыщения быстродействия системы в ней установлен струйный блок памяти, подключенный к выходу считывающего устройства и входным каналам блока сравнения, и блок унравления считыванием информации, подключенный к выходу считывающего устройства и выходу блока памяти.
Указанные отличия нозволяют осуществить ввод ЧИСЛОВОГО зада.ния на следующую позицию во время отработки системой Предыдущей позиции.
На фиг. 1 приведена блок-схема цифровой пневмогидравлической п,рогра;м:мно-следящей
системы; на фиг. 2 - принципиальная схема блока памяти; на фиг. 3 - схема устройства управления считыванием информации.
Основными блоками системы являются:
считывающее устройство СУ с механизмом -перемещения перфоленты, оло-к сравнения ЛЕС, блок управления скоростью движения рабочего органа БУС, усилители (мощности У Б и УМ, пневмомеханические преобразователи в цепях быстрого и медленного движения соответственно ПБ и ПМ, гидроусилители ГБ и ГМ, гидродвигатель ГД, редуктор Р, механизм станка М; устройство обратной связи, которое состоит из датчика точного отсчета
ДТ, логического преобразователя точного отсчета ЛПТ, датчика грубого отсчета ДГ, его логического преобразователя ЛЯГ; отсчетный редуктор ОР; блок памяти БП и блок управления считыванием информации БУЗС.
На схеме (фиг. 1) по,казаны взаимосвязи между всеми блоками. В целом по одной координате система представляет собой за.мкнутую программно-следящую систему. Предусмотрены разные скорости отработки программы: быстрые движения для подхода к заданному положению и медленная подача для точного позиционирования. Для работы всех рабочих органов станка по нескольким коорди1натам (например /Сь К и т. д.) должен
быть предусмотрен блок цикловой автоматики БЦА.
Блок цикловой автоматики БЦА формирует команды на выполнение подвода и отвода рабочего инструмента, начало цикла цоз:иционирования по :различны,м координатам, перемещения других механизмов, например закрепление заготовки, управление рел имами резания на станке и т. д. К этому блоку поступают сигналы от датчиков Д рабочих органов станка.
Лрограммон-оситель в виде перфоленты проходит через бесконтактное устройство параллельного считывания СУ, которое обеспечивает шаговое перемещение на один кадр для ввода задания на перемещение механизма М в следующую координату. Программа работы системы представляет собой информацию об абсолютном значении заданного пере.мещеиия и записывается в цифровом коде. Информация после считывания поступает в блок памяти БП, а затем в логический блок сравнения ЛВС, куда одновременно подается кодированная информация о фактическом значении координаты позиционирования.
Координата перемещения рабочего органа машины (налример, каретки ста;нка) измеряется датчиком точного ДТ и грубого отсчета ДГ устройства обратной связи. Датчики представляют собой бесконтактные преобразователи угла поворота ,в цифровой пневматический код. Датчики точного и грубого отсчета работают как преобразователи типа «аналог- код ,и в каждый промежуток времени выдают информацию о текущей координате по31иционирования. Информация не теряется даже при снятии и возобновлении подачи давления питающего воздуха.
Датчик точного отсчета имеет емкость восемь двоичных разрядов, что при щаге винта, например, 5 мм обеспечивает разрещающую способность системы 0,02 мм. Датчик точного отсчета связан непосредственно с ходовым винтом. Датчик грубого отсчета соединен с винтом через редуктор с передаточным отиощением 1 : 1,28, имеет семь двоичных разрядов и нредназначен для подсчета целых чисел оборотов винта.
Блок управления скоростью БУС отключает датчик точного отсчета при большой скорости отработки программы.
Грубый отсчет прекращается при совпадении информации от перфоленты и датчика грубого отсчета (в БУС формируется сигнал гз) и система переключается на замедленную подачу рабочего органа станка. Останов рабочего органа происходит при совпадении информации от датчика точного отсчета ДТ и от перфоленты.
Блок сравнения ЛВС вначале принимает информацию от датчика грубого ДГ и затем точного отсчета ДТ и может формировать сигналы: «больще, «.меньще, «равно.
Блок БУЗС, действуя на логические преобразователи ЛПТ и ЛПГ, обеспечивает
управление порядком считывания кодов с датчиков точного « грубого отсчета, а та.кже переключает систему с большей на замедленную подачу механизма М.
Логические преобразователи датчика точного отсчета ЛПТ и грубого отсчета ЛПГ являются преобразователями последовательного счета и состоят из пневматических элементов, которые обеспечивают надежное считывание
информации по способу «двойной счетки.
Усилители УБ и УМ представляют собой маломощные быстродействующие пневматические усилители с выходной мощностью, достаточной для приведения в действие пневмомеханических преобразователей ПБ и ЯМ соответственно цепей быстрых и медленных перемещений, от которых сигналы передаются на гидроусилители ГБ и ГМ. При медленной подаче усилитель ГБ отключен и рабочая жидкость ноступает к гидродвигателю ГД только от гидроусилителя ГМ.
От гидродвигателя движение передается через силовой редуктар Р, винто;вую пару к механизму станка М. Непосредственно на
винте закреплен диск датчика точного отсчета ДТ, а диск датчика грубого отсчета ДГ приводится во вращение от валика отсчетного редуктора ОР.
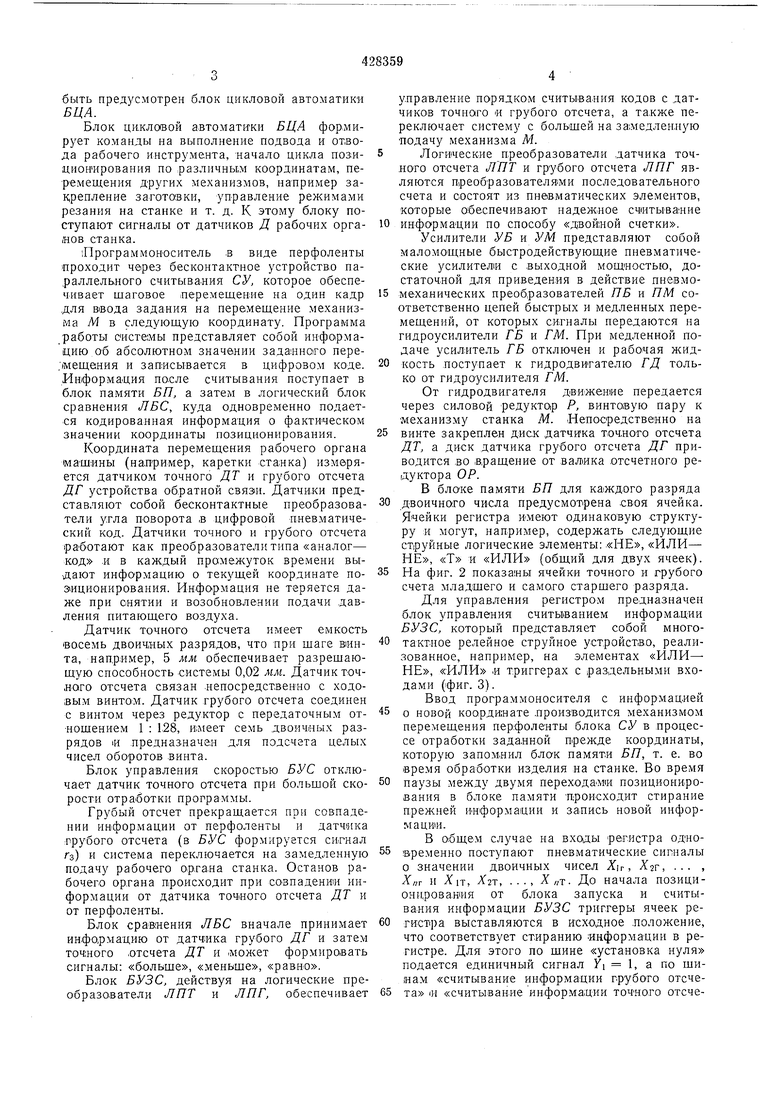
В блоке памяти БП для каждого разряда
двоичного числа предусмотрена своя ячейка. Ячейки регистра имеют одинаковую структуру и могут, например, содержать следующие струйные логические элементы: .«НЕ, «ИЛИ- НЕ, «Т и «ИЛИ (общий для двух ячеек).
На фиг. 2 показаны ячейки точного и грубого счета младщего и самого старшего разряда.
Для управления регистром предназначен блок управления считыванием информации БУЗС, который представляет собой многотактное релейное струйное устройство, реализованное, например, на элементах «ИЛИ- НЕ, «ИЛИ и триггерах с раздельными входами (фиг. 3).
Ввод программоносителя с информацией
о новой координате .производится механизмом перемещения пер.фоленты блока СУ в процессе отработки заданной прежде коор.динаты, которую запомнил блок памяти БП, т. е. во время обработки изделия на станке. Во время
паузы между двумя перех.одаМ1и позиционирования в блоке памяти происходит стирание прежней информации и запись новой информации.
В общем случае на входы регистра одновременно поступают пневматические сигналы о значении двоичных чисел Xir, Хгг, ... , Х„г и Хп, , ..., Х„т. До начала позиционнрова.ния от блока запуска и считывания информации БУЗС триггеры ячеек регистра выставляются в исходное .положение, что соответствует стиранию информации в регистре. Для этого по щине «установка нуля подается единичный сигнал У 1, а по щияам «считывание информации грубого отсчета (И «считывание информации точного отсчета подаются сигналы УЗ 1 и У,, 1, котопые запрещают считывание информации с регистра в блок сравнения ЛВС. Число, которое .необходимо записать в регистр, подается в параллельном .коде через .инверторы /на входные элементы 2 («ИЛИ-НЕ) и пропускается через них при подаче от устройства управления запуском и считыванием информации управляющего импульса записи 2 0. При этом переключаются триггерные элементы Я, которые хранят введенную информацию. Выдача залисанного в регистре числа производится через элементы 3 (элементы «ИЛИ-НЕ), при подаче на них управляющего сигнала УЗ О, разрещающего считывания информации с ячеек грубого отсчета. В этом случае подается запрет на считывание информации с ячеек точного отсчета регистра У4 1. Затем одновременно подаются сигналы У4 О, УЗ 1, которые соответственно разрещают считывание с ячеек точиого отсчета и запрещают считывавие с ячеек грубого отсчета. Элементы 4 («ИЛИ) пропускают на блок сравне.ния то число, которое считывается в данный MOiMeHT. Вариант схемы блока БУЗС, приведенной на фиг. 3, обеспечивает автоматическое управление запуском и считыванием информации в пнев)могидравлической следящей системе. Действительно, при подаче питания в систему элемент памяти Я, на верхнем выходе выдает единичный сигнал TI, который переключает элементы П и П в исходное положение, в исходном положении также будет элемент Яд. В исходное положение выставятся элементы непосредственно перед усилителями УЗ и Y. Таким образом перед осуществлением цикла будут поданы сигналы: запрет иа стира.ние информации (/| О после повторителя У| 0), запрет записи информации (/2 1, YZ 1), запрет считывания информации с ячеек грубого отсчета регистра (/з 1, УЗ 1), запрет считывани-я информации с ячеек точного отсчета регистра (, Y), запрет на перемещение перфоленты (/5 О, У-, 0). Перед ячейками блока памяти БП ставятся повторители для усиления сигналов / // 1, 12, . . . , i5После нажатия на кнопку пуска (Кп 1)г триггер Я) выдает сигнал TI и замыкает обратную связь через элементы / («ИЛИ-НЕ) и 2 («ИЛИ). Этим самым регистр грубого и точного отсчета получает разрещение для работы. В это же время элемент памяти Я2 благодаря сигналу /(„ / направит сигнал /1 1 в цепочку усилителей 5 щины УЬ от которого выставятся ячейки грубого .и точного отсчета в нуль, т. е. в них сотрутся предыдущие числа. Так ка.к перед каждой ячейкой по щине У, установлены усилители 5, то ячейки перебрасываются в нуль последовательно одна за другой от разряда к разряду, сигнал Xi о том, что последняя ячейка и в результате все ячейки блока пам-яти переброщены в иуль .можно снять после последнего усилителя 5 S щине У Сигнал Xi 1 переключит элемент .памяти Яз вверх, от элемента памяти сигнал 7з 2 О поступит .на отключающий вход элемента Я2. Иа усилителях 5 щины У сни.мается команда «стереть запись, т. е. в репистр подается сигнал Т 1 0. Одновременно с нижнего выхода триггера Яз нулевой сигнал Гз /2 О подается на усилители 5 щины У2 и происходит запись числа , Х-2Г, ... , Х„г в ячейках регистра грубого отсчета и числа , X з, ... , Хпт:- в ячейках точно.го отсчета. (После операции записи информации, т. е. после того как сигнал пройдет по всем усилителям 5 щины Уг, в регистре образуется сигнал Х О, который инвертируется в элемент 3 (Xz 1), выставляет триггер Я4 так, что сигнал 74 /2 1 с его верхнего выхода запретит запись информации в регистре. В это же время Х 1 поступает на элемент 4 («ИЛИ- НЕ), «а выходе которого .получается сигнал /3 О, он пройдет по линии В на блок управления скорости БУС и включит быструю подачу рабочего органа станка. Подтверждающий сишнал об этом Z 1 по.дхватит команду /з О, УЗ О («разрещить считывание с ячеек грубого отсчета) и одновременно после инвертирования /з /5 1 включит усилитель 5. Сигнал УЗ 1 приведет в дейст1вие механизм перемещения перфоленты. Перфолента передвинется на один кадр. Интервал времени, в течение которого происходит быстрая подача, достаточен, чтобы сработал механизм перемещения перфоленты. В это же время сигнал /з О включает логический преобразователь грубого отсчета. По окончании операции считывания инф.ормации с ячеек грубого отсчета, т. е. после того как на логическом блоке сравнения получен результат «равно и отключена цепь быстрого перемещения (УБ-ПБ-ГБ), от блока упра.влбния скоростью БУС подается сигнал , после элемента 4 («ИЛИ-ИЕ) будет сигнал /з 1, УЗ 1, запрещающий считыванне информации с ячеек грубого от:счета. Начинается медленная подача рабочего органа станка, это подтверждает сигнал , который поступает от блока управления скоростью БУС. Кроме того, после запрета считывания информации с ячеек грубого отсчета выдается сигнал 3. Логическая схема перед усилителем У собрана по структурной формуле: /4 лз 4 Лз + /4. В этом случае разрещение на считывание информации с ячеек точного отсчета /4 О по щине У будет дано только при подаче единичных сигналов Хз 1, Z 1, подтверждающих за.прет считывания с регистра грубого
отсчета н :начало медленной подачи. Во всех остальных случаях будет подан сигнал , запрещающий считывание информа-ции с ячеек точного отсчета регистра. Одновредмекно с разрешением считывания информации с ячеек точного отсчета регистра (/4 54 0) сигнал /4 0 включит логический преобразователь точного отсчета ЛПТ.
После прихода механизма станка М в заданную координату подается запрет ,на считывание числа Хп, Х-2-, .... Хп-, для чего от блока управления скоростью УС подается сигнал . Это соответствует положению «равно бло.ка оравления ЛЕС, и означает что медленная подача закончена. Формируется сигнал , , который запретит считывание информации с ячеек точного отсчета. Продолжается подача сигналов «запрет стирания информации (/i 0, 1 1), «запрет записи (. ). «запрет считывания с ячеек грубого отсчета (, ).
Лосле того как блок цикловой автоматики БЦА подтвердит, что рабочий инструмент завершил размерную обработку в заданной координате и может быть начато .перемещение рабочего органа станка в «овую координату, подается сигнал «подготовка цщкла (Гподг 1). Этот сигнал по схеме «ИЛИ поступит в логические блоки (.) и все элементы выставятся в положение начала цикла. Подготовка цикла будет закопчена тог.да, когда сигнал по л.инии А подготовит блок управления скоростью БУС, блок оравнеиия ЛЕС, логические преобразователи информации датчиков положения ЛПТ и ЛПГ. По контрольной пробивке в перфоленте должно быть проверено, подана ли перфолента с новыми числами в считывающее устройство. Отдельные сигналы лпт, подтверждающие готовность системы к работе, .сформируют сигнал , который но схеаде «ИЛИ () будет .подан в систему и заодно в блок управления запуском я считыванием информации и цикл повторится, т. е. инструмент будет выведен в новую .координату.
Таким образом, в предлагаемой системе обеспечивается преселективный .ввод числовой информации и тем самым исключаются потери времени.
Предмет изобретения
Цифровая пневмогидраелическая программно-следящая система, например, для поопционной обработки на металлорежущих станках, содержащая считы.вающее устройство, блоки сравнения и управления скоростью .движенИЯ раб:0чего органа, каждый из которых соединен через соответствующие последовательно соединенные усилитель, пневмомеханический преобразователь и гидроусилитель с гидродвигателем, и датчики точного и грубого отсчета, соединенные через соответствующие логические преобраз.ователи с входами
блока сравнения, отличающаяся тем, что, с целью .повышения быстродействия системы, .в ней установлен струйный блок памяти, подключенный к выходу считывающего устройства и входным .каналам блока сравнения, и
блок управления -считыванием информации, подключенный к выходу считывающего устройства и выходу блока памяти.
/
Н :,Л5С
Фиг 2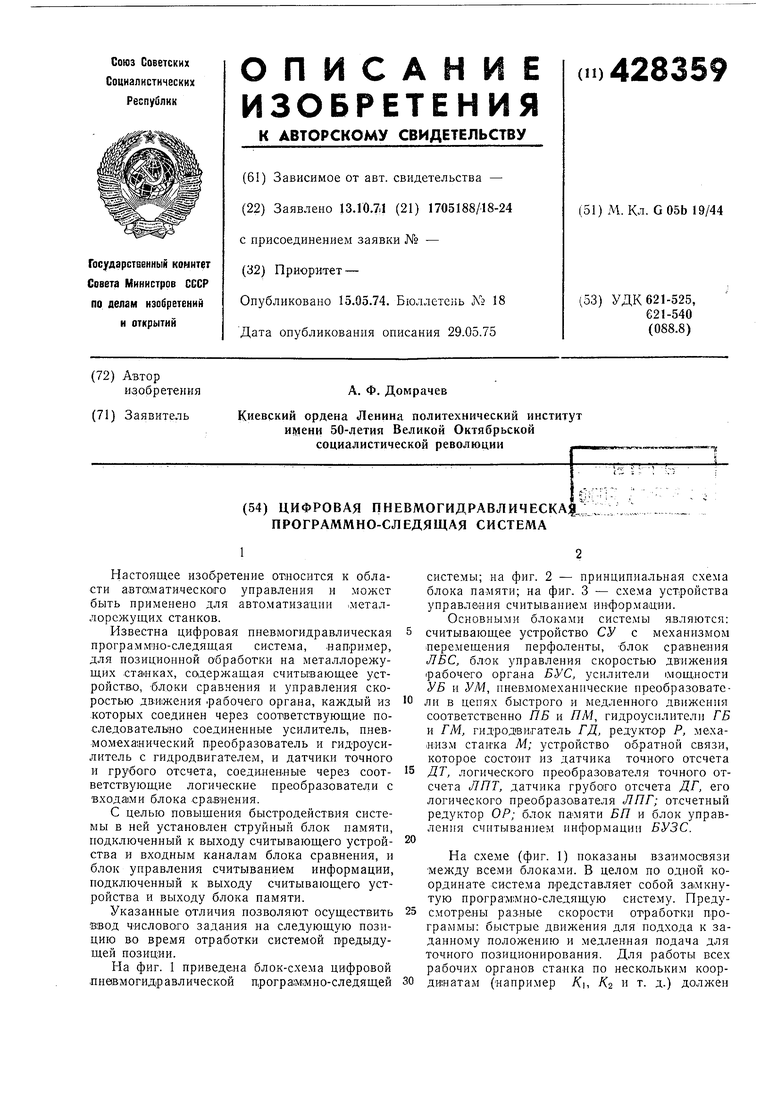


| название | год | авторы | номер документа |
|---|---|---|---|
| УНИВЕРСАЛЬНАЯ ЦИФРОВАЯ УПРАВЛЯЮЩАЯ МАШИНА | 1965 |
|
SU170218A1 |
| Гамма-камера с коррекцией неоднородности изображения | 1984 |
|
SU1340750A1 |
| ПНЕВМОГИДРАВЛИЧЕСКОЕ СТРУЙНОЕ ЦИФРОВОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1968 |
|
SU209565A1 |
| Многоканальная электроразведочная станция | 1980 |
|
SU934414A1 |
| Устройство для фотоэлектрического считывания информации с перфоленты | 1987 |
|
SU1566384A1 |
| Преобразователь угол-код | 1982 |
|
SU1016807A1 |
| Автомат для сортирования, например писем | 1959 |
|
SU124724A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1432340A1 |
| Устройство для централизованного контроля и оперативного управления | 1977 |
|
SU633029A1 |
| Программно-управляемый цифровой фильтр | 1985 |
|
SU1338006A1 |

Н йог блоком
ч
I,
-W
ОтЛ
Н,.У5Отп„ЖТHJJSC
MJWC
7
лпг
г ОтЛГ
Is
,,sy
,„БП
