григоприепная ллагпфор/ а
S3i.
bl
GO Ю СО 4
срабатывает компаратор 15, формирующий сигнал, равный по длительности времени нахождения автомобиля на платформе. Формирователь 14 переднего фронта этого сигнала сбрасывает сумматор 10 и счетчик 17 в исходное состояние, а также запускает в ЦП 4 программу, храняпп юся в ПЗУ 5. По этой программе ПП 4 с частотой, задаваемой спп- хропизатором 7, осуществляет опрос АПП 9, сглаживание его показаний и запись их в по- следовательпые адреса блока памяти 8. Одновременно с той же-частотой сумматор 10 на- кагыивает значение уставки, равное отношению времени проезда по платформе одной оси автомобиля ко всему интервалу проезда. Тактовые импульсы подсчитываются счетчиком 17, а блок 11 вычитания определяет разницу показаний счетчика 17 и сумматора 10, которая поступает в ЦП 4. По окончании сигнала с компаратора 15 срабатывает формирователь 13 заднего фронта, останавливающий программу опроса АцП 9
в ЦП 4, и запускает другую программу, которая производит расчет фильтрации,.мас- П1табирования и осупич твляет вывод результата на индикатор 12. 2 ил.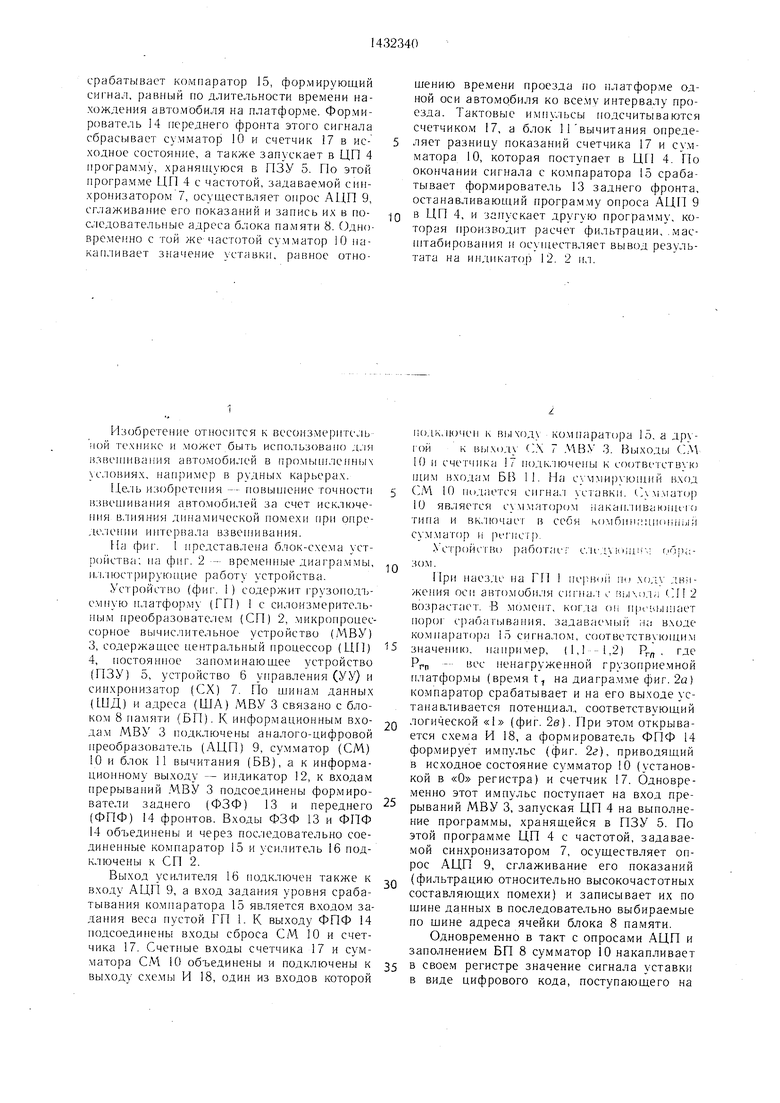
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания движущихся объектов | 1985 |
|
SU1288506A1 |
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| Устройство для взвешивания движущихся объектов | 1984 |
|
SU1273745A2 |
| Устройство для взвешивания | 1986 |
|
SU1362944A1 |
| Устройство для обмена информацией между цифровой и аналоговой вычислительными машинами | 1986 |
|
SU1348844A1 |
| Автоматическая микропроцессорная весоизмерительная система | 1987 |
|
SU1566226A1 |
| Устройство для распознавания образов | 1986 |
|
SU1361589A1 |
| Устройство для распознавания образов | 1987 |
|
SU1536412A2 |
| Устройство для считывания графической информации | 1987 |
|
SU1564661A1 |
| Устройство для обмена информацией между цифровой и аналоговой вычислительными машинами | 1983 |
|
SU1257673A1 |
Изобретение позволяет повысить точность взвешивания автомобилей за счет исключения влияния динамической помехи при определении интервала взвешивания. При проезде авто.мобиля по платформе 1 сигналы от силоизмерительных датчиков с сило- измерительным преобразователем 2 после усилителя 16 и АЦП 9 поступают на инфор- .мационный вход центрального процессора (ЦП) 4 микропроцессорного вычислительного устройства 3. При превышении сигна- ло.м с усилителя 16 значения, соответствующего массе венагруженной платформы 1,
Изобретение относится к весоизмеритсль 1ой технике и может быть использовано для нзвсмпивания авто.мобилей в промы1ПЛСГ(П1)1 условиях, например в рудных карьерах.
Цель изобретепия -- rioBbiniciine точности взнешивапия автомобилей за счет исключения влияния дина.мической по.мехи при онре- де, 1снии интер 5ала взвешивания.
На фиг. 1 представлена блок-схема устройства; па (joiir. 2 -- време1шые диагра.ммы, н.. 1. пострирую цие работу устройства.
Устройство (фиг. 1 ) содержит |-рузоподъ- емпую нлатфор.м}- (ГП) 1 с силоизмеритель- ным преобразовате;1ем (СП) 2, .микропроцессорное вычислительное устройство (ЛАВУ)
3,содержащее центральный процессор (ЦП)
4,постоянное запо.минающее устройство (ПЗУ) 5, устройство 6 управления (УУ) и синхронизатор (СХ) 7. По шипам данных (ШД) и адреса (Ш.Л) МВУ 3 связано с блоком 8 на.мяти (БП). К инфор.мационным входам МВУ 3 подключены аналого-цифровой преобразователь (АЦП) 9, сум.матор (СМ) 10 и блок 11 вычитания (БВ), а к иифор.ма- ционному выходу - индикатор 12, к входам прерываний МВУ 3 подсоединены формирователи заднего (ФЗФ) 13 и переднего (ФПФ) 14 фронтов. Входы ФЗФ 13 и ФПФ 14 объединены и через последовательно соединенные компаратор 15 и усилитель 16 подключены к СП 2.
Выход усилителя 16 подключен также к входу АЦП 9, а вход задания уровня срабатывания компаратора 15 является входом задания веса пустой ГП 1. К выходу ФПФ 14 подсоединены входы сброса СМ 10 и счетчика 17. Счетные входы счетчика 17 и сумматора СМ 10 объединены и подключены к выходу схемы И 18, один из входов которой
ио.1ключеп к выходу компаратора 1о. а гой к ВЫХОД} (;. 7 .НВУ 3. РЗыходы (Л 10 и счетчика 17 подк. 1ючены к сосггветствую щим входам Б1;5 11. Па С .лширующий вход
С-М 10 подается сигна.. с1авки. Слм.матор 10 яв;1яется сум.матор(.1М .чакан.ливаюна о типа и вк, ночает в себя комбнмгшпшип.; сумматор и регист}).
. стройстш. работает c. ie.ri iiJiu:i . г.бр;;- зом.
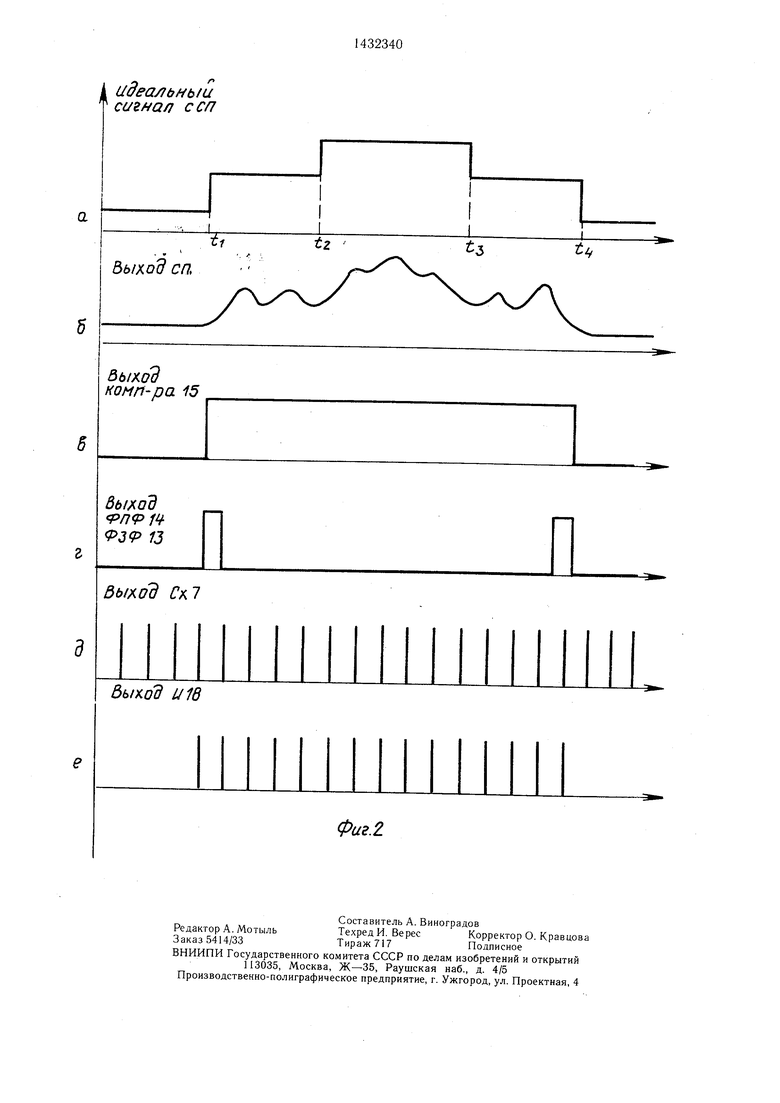
При наезде па ГЦ 1 iR p Hi.iii по жения осп автомобиля ciii Ha. i с rHJxo.ifi (П 2 возрастает. В м(;мепт, когда он прсч ьпиает порог с)абатывания, задаваем1з1Й ма входе комиаратора 15 сигналом, соответствук.)щи.м
значению, например, (1,1-1,2) Р , где РГ.„ - вес ненагруженной грузоприемной платформы (время t, на диаграмме фиг. 2а) компаратор срабатывает и на его выходе устанавливается потенциал., соответствующий
логической «1 (фиг. 2в). При этом открывается схема И 18, а формирователь ФПФ 14 фор.мирует импульс (фиг. 2г), приводящий в исходное состояние су.мматор 10 (установкой в «О регистра) и счетчик 17. бдновре- .менно этот ИМПУЛЬС поступает на вход
рываний МВУ 3, запуская ЦП 4 на выполнение программы, хранящейся в ПЗУ 5. По этой программе ЦП 4 с частотой, задаваемой синхронизатором 7, осуществляет опрос АЦП 9, сглаживание его показаний
(фильтрацию относительно высокочастотных составляющих помехи) и записывает их по шине данных в последовательно выбирае.мые по щине адреса ячейки блока 8 памяти.
Одновременно в такт с опросами АЦП и заполнением БП 8 сумматор 10 накапливает
в своем регистре значение сигнала уставки в виде цифрового кода, поступающего на
вход уставки и равного отношению времени проезда по ГП одной оси автомобиля к всему времени проезда. Накопление производится путем суммирования в сумматоре кода уставки с кодом, соответствующим cy.viMe. накопленной на предыдущем такте и хранящейся в его регистре. Тактирование осуществляется импульсами с СХ 7, поступающими через открытую схе.му И 18 (фиг. 2 д, е ). Эти же тактовые импульсы подсчитываются счетчиком 17, а разница показаний счетчика 17 и сумматора 10 синхронно устанавливается на выходе блока 1 1 вычитания.
Такой алгоритм работы устройства сох
раняется в течение всего времени проезда автомобиля по платформе до съезда с нее второй его оси (момент t, фиг. 2 а), когда сигнал с СП 2 снижается до уровня срабатывания компаратора 15, переводя его в состояние логического «О (фиг. 2в). При зтом -.(рекрандается работа сумматора 10, счетчи- кя 17 и б,. 1ок;1 11 вычитания, а на их выходах устанавливаются цифровые коды, соот- нстствующие номерам ячеек БП 8, в которых написаны отсчеты сигнала с СП 2, соответ- )iiuie моментам последовательного да второй оси автомобиля на платформы (N) ncpHoii ( г) и второй (.N,) его осей (t. t, и ц. фиг. 2а) соответственно, а массив ячеек БП 8 в интервале N/ -. хранит отсветы cn.i-iia.ia с СП 2. соответствующие ин- терва. | г tj. Сигналом уставки задано соотношеиио f
f i -i
OOLUf 1tdj l
ле ioc - в)емя нахождения на платформе To.ibKo одной оси (например, первой ); оош, общее время проезда автомобиля
по платформе;
ii,-2-, моменты времени, соответствую- щпе tocH и {„gu из диаграммы сигнала с СП 2. (фиг. 2а).
Например, при с |- и количестве тактовых импульсов, прощедщих за время t,- tj проезда автомобиля, СХ , в БП 8 будет заполнено 200 ячеек памяти, счетчик 17 насчитает N 200, сумматор накопит число .N., 200-(f- 25, а на ВУ 11 установится код N . N- -N, -- 1 75, что соответ- ствует номерам начала и конца массива ячеек, хранящих отсчеты сигнала за весь интервал проезда по платформе одновременно двух осей автомобиля (достоверный интервал взвещивания).
По заднему фронту сигнала с компарато- ра 15 формирователь 13 формирует и.мп.ульс
5 Q
5
5
0 0
5
Q
п
5
(фиг. 2г), поступающий па второй вход прерываний МВУ 3. При этом выполнение программы опроса АЦП и з аполнения ячеек БП 8 прекращается, а запускается другая программа, также записанная в ПЗУ 5. Согласно ей ЦП 4 считывает со своих инфор.ма- ционных входов номера ячеек и N, по начальному адресу А„. определяет конкретные адреса AI . AHAV- «., Aj А„„-(-.1 ячеек БП 8, ограничиваюц их достоверные отсчеты сигнала с СП 2: по ША и ШД выбирает их и производит окончательную обработку (фильтрацию низкочастотной помехи, масштабирование и вывод. Результат индицируется на индикаторе 12 (например, табло пульта управления или на регистраторе), после чего выполнение описанных программ прекращается и ЦП 4 возвращается в состояние ожидания последующих прерываний (циклов измерения веса).
Формула изобретения
Устройство для взвещивания авто.моби- лей в движении, содержащее последовательно связанные силоизмерительный преобразователь, усилитель и компаратор, а также сум.матор и аналого-цифровой преобразователь, выход которого подключен к информационному входу микропроцессорного вычислительного устройства, связанного с индикатором, отличающееся те.м, что, с целью повыщения точности, в него введены б,чок памяти, формирователи переднего и заднего фронтов, схема И, блок вычитания и счетчик, причем вход аналого-цифрового преобразователя подключен к выходу усилителя, блок памяти связан с микропроцессорны.м вычислительны.м устройство.м шина.ми адреса и данных, первый вход схемы И и входы формирователей переднего и заднего фронтов подключены к выходу компаратора, второй вход которого является входом задания веса, а выходы формирователей переднего и заднего фронтов подключены к первому и второму входам прерьгваний микропроцессорного вычисл1 те,чьного устройс1ва, причем выход формирователя переднего фронта связан с входами.сброса сумматора и счетчика, счетные входы которых соединены с выходом схемы И, второй вход которой подключен к синхронизирующему выходу микропроцессорного вычислительного устройства, выход сумматора, на суммирующий вход которого поступает сигнал уставки, соединен с вторым инфор.мационным входом микропроцессорного вычислительного устройства и первы.м входом блока вычитания, второй вход которого связан с выходом счетчика, а выход - с третьим информационным входо.м микропроцессорного вычислительного устройства.
1 идеальный сигнал ссп
ti
ды)(од СП,
5ы}(.од номп-ра 15
PJ9 /J
5ы)(од СУ. 1
ды)(.од и 16
| Устройство для измерения температуры | 1980 |
|
SU991186A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
