1
Изобретение относится к области измерения уровня жидких и пульновидных материалов в открытых емкостях и бассейнах.
Известен автоматический следящий уровнемер, содержащий реверсивный электродвигатель и барабан, на который наматывается кабель или трос, на свободном конце которого расположен чувствительный элемент, например поплавок или электрод.
Определение уровня производят измерением длины троса или кабеля, смотанного с барабана. Для этого используют счетчики оборотов барабана,сельсины и пр.
Для устранения систематической погрешности измерения уровня, возникающей из-за отклонения диаметров барабана и кабеля от расчетных значений, в предложенном устройстве между барабаном и преобразователем угла поворота барабана в уровень введен зубчатый дифференциал, одно из солнечных колес которого связано с барабаном, а другое- с корректором погрешности.
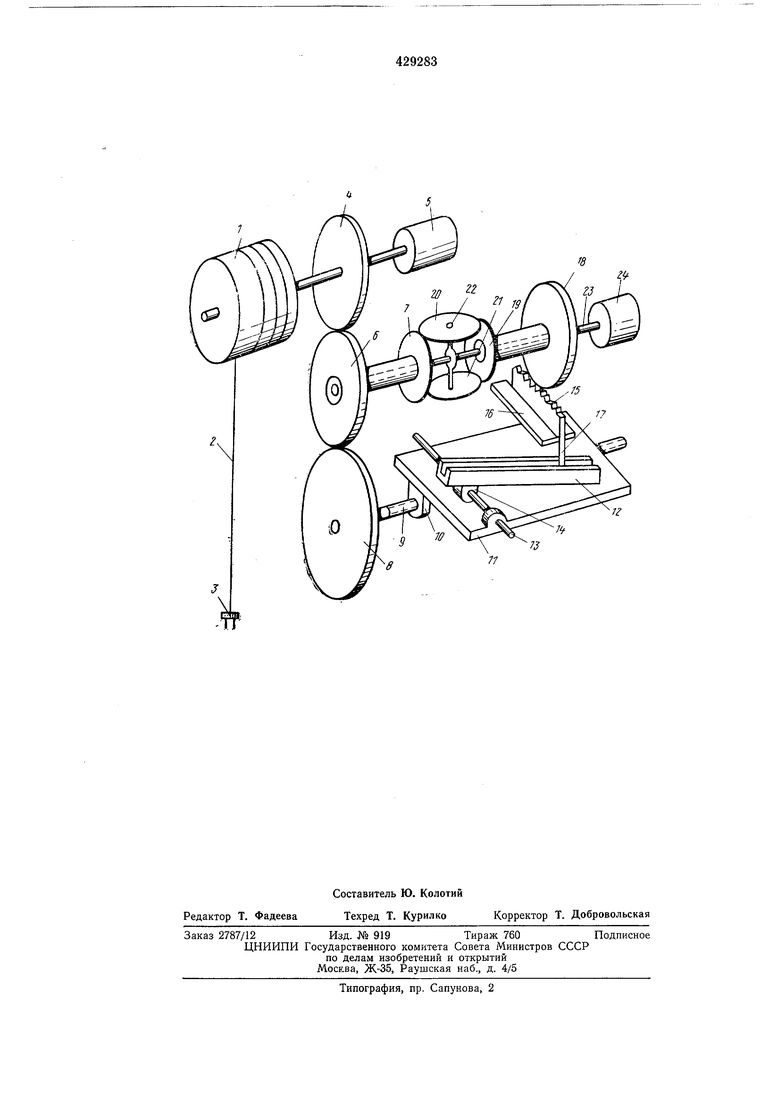
На чертеже изображена кинематическая схема предлагаемого устройства.
На барабан 1 намотан кабель или трос 2, свободный конец которого соединен с чувствительным элементом 3. Барабан 1 жестко связан с шестерней 4 и реверсивным электродвигателем 5. Шестерня 4 находится в зацеплении с шестерней 6, жестко связанной с солнечным колесом 7 дифференциала, а шестерня 6 зацепляется с шестерней 8, жестко связанной с ходовым винтом 9. Ходовой винт 9 проходит через гайку 10, закрепленную на каретке 11. На последней шарнирно закреплены корректируюш.ая планка 12 и регулировочный винт 13, связанные через маточную гайку 14. Зубчатая рейка 15, расположенная в направляющих 16, имеет палец 17, который входит в паз корректирующей планки 12. Рейка 15 зацепляется с шестерней 18, которая жестко связана с солнечным колесом 19 дифференциала. Солнечные колеса 7 и 19 находятся в зацеплении с сателлитами 20 и 21, свободно вращающимися на оси 22, жестко связанной с основной осью 23 дифференциала. С осью 23 дифференциала связан преобразователь 24 угла поворота барабана в измеряемый уровень.
Устройство работает следующим образом. При изменении контролируемого уровня сигнал от чувствительного элемента 3 по кабелю 2 поступает в схему управления (на чертеже не показана). Включается реверсивный электродвигатель 5, и вращение передается на барабан 1 и шестерню 4. При вращении барабана кабель 2 сматывается или наматывается на него до поступления сигнала с чувствительного элемента 3 на выключение реверсивного
электродвигателя 5. Вращение барабана через шестерню 4 передается на шестерню 6, солнечное колесо 7, шестерню 8 и ходовой винт 9.
Если сумма диаметров барабана и кабеля соответствует расчетной, корректируюш,ая планка 12 устанавливается параллельно оси ходового винта 9. При вращении ходового винта 9 каретка 11 с установленной на ней корректирующей планкой 12 перемещается вдоль оси винта 9. Палец 17 скользит внутри паза, рейка 15 остается неподвижной, а шестерня 18 и солнечное колесо 19 заторможены. Основная ось 23 дифференциала с сателлитами 20 и 21 вращается только от солнечного колеса 7, следовательно на преобразователь 24 передается угол, соответствующий смотанной длине кабеля, т. е. с номинальным передаточным отношением.
Если сумма диаметров барабана и кабеля отличается от расчетного значения, на преобразователь 24 передается угол с передаточным отношением, большим или меньшим номинального, и угол поворота преобразователя не соответствует смотанной с барабана длине кабеля, т. е. измеряемому уровню.
Для автоматического устранения этой погрешности корректирующую планку 12 с помощью регулировочного винта 13 устанавливают под углом к оси ходового винта 9. Необходимый угол установки корректирующей планки определяют по величине полученной погрешности измерения уровня.
Если корректирующая планка 12 установлена под необходимым углом к оси ходового винта 9, то при перемещении каретки 11 вдоль оси ходового винта 9 палец 17 скользит вдоль паза корректирующей планки 12 и одновременно перемещается вместе с рейкой 15 по направляющим 16. Шестерня 18 поворачивается вместе с солнечным колесом 19 и, следовательно, основная ось дифференциала вместе с сателлитами 20 и 21 поворачивается на дополнительный угол, соответствующий введенной поправке, а общий угол поворота соответствует смотанной с барабана 1 длине кабеля, т. е. измеряемому уровню. Таким образом, на преобразователь 24 всегда передается угол, ссответствующий измеряемому уровню.
Предмет изобретения
Устройство для автоматического измерения уровня, содержащее барабан с намотанным на него кабелем или тросом, соединенный с чувствительным элементом и преобразователем угла поворота барабана в измеряемый уровень, отличающееся тем, что, с целью автоматической компенсации систематической погрешности измерения уровня, возникающей вследствие отклонения диаметра барабана и кабеля от расчетных значений, между барабаном и преобразователем угла поворота введен зубчатый дифференциал, одно из солнечных колес которого связано с барабаном, а другое - с корректором погрещности.
8
2
;/
/J
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельный узел станка для обработки ступенчатых упорных резьб | 1981 |
|
SU975268A1 |
| Резьбошлифовальный станок | 1991 |
|
SU1808545A1 |
| Канатоукладчик | 1974 |
|
SU511281A1 |
| Канатоукладчик | 1977 |
|
SU672147A1 |
| РЕГИСТРАТОР УРОВНЯ | 1972 |
|
SU356470A1 |
| Лебедка для гидрологических исследований | 1972 |
|
SU468869A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВОДА КОЛЕС ИЛИ МОСТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2520224C1 |
| Спасательное устройство эвакуации из буровой платформы | 2017 |
|
RU2651236C1 |
| Прибор для контроля и разметкигРЕбНыХ ВиНТОВ | 1979 |
|
SU853362A1 |
| Подающее устройство станаХОлОдНОй пРОКАТКи ТРуб | 1979 |
|
SU818683A1 |