(54) КАНАТОУКЛАДЧИК

| название | год | авторы | номер документа |
|---|---|---|---|
| Канатоукладчик | 1977 |
|
SU672147A1 |
| Канатоукладчик | 1980 |
|
SU943190A1 |
| Лебедка | 1985 |
|
SU1446096A1 |
| Канатоукладчик лебедки | 1969 |
|
SU437708A1 |
| Канатоукладчик | 1978 |
|
SU856968A1 |
| Канатоукладчик | 1975 |
|
SU519387A2 |
| КАНАТОУКЛАДЧИК | 1972 |
|
SU360316A1 |
| Кабелеукладчик | 1988 |
|
SU1595787A1 |
| Лебедка для направляющих канатов водолазного колокола | 1988 |
|
SU1606442A1 |
| Канатоукладчик | 1976 |
|
SU596537A1 |
1
Изобретение относятся к грузоподъемным механизмам, а именно к канатоукладчикам лебедок.
Известны канатоукладчики, содержащие ХОДОВОЙ ВИНТ, перемещающуюся по нему с
помощью поводка каретку, устройство для корректировки положения каретки с автономным приводом и привод, кинематически связанный через дифференциал с барабаном. Однако для обслуживания таких канатоукладчиков обязательно присутствие оператора.
Цель изобретения - автоматизация корректировки положения каретки.
Для этого каретка снабжена двумя парами датчиков, электрически связанных с автономным приводом, и двумя подпружиненными двуплечими рычагами, одними плечами контактирующими с одной парой датчиков и несущими на других концах направляющие канат ролики, а на поводке шарнирно закреплен рычаг, поочередно взаимодействующий с каждым из другой пары датчиков.
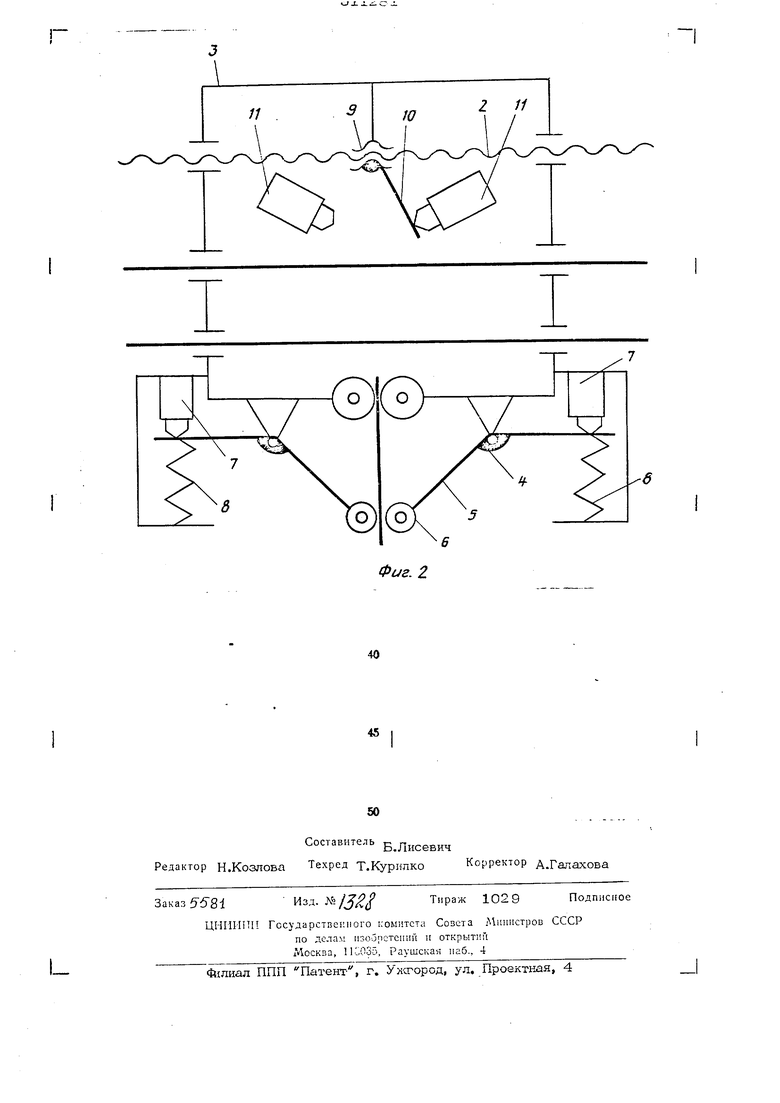
На фиг. 1 изображена кинематическая схема канатоукладчика; на фиг. 2 - каретка с системой автоматической корректировки ее положения.
Канатоукладчик для укладки гибкого элемента на-барабан 1 состоит из ходового винта 2, каретки 3, на которой установлены на осях 4 два рычага 5 с роликами 6 на концах, двух датчиков 7, пружин 8, поводка 9 с рычагом 1О и пары датчиков 11
Ходовой ВИНТ 2 соединен с выходным валом 12 редуктора, который связан с водилом 13 дифференциала сателлитами 14, одно солнечное колесо 15 связано с цепным приводом 16 с барабаном 1, а второе солнечное колесо 17 через цилиндрическую 18 и червячную 19 зубчатые пары связано с автономным приводом 2О, имеющим возMojKHOCTb ручного управления с пульта 21.
Канатоукладчик работает следующим образом.
При нормальной укладке гибкого элемента вращение от барабана 1 через цепной привод 16, солнечное колесо 15 ди4 ферекциала, ВОДИЛО 13 с сателлитами 14 при неподвижном колесе 17, выхоаной вал 12 редуктора передается ходовому впнту 2, который переме)даег с позлотип-п иододка е каретку 3 вдоль барабана, оэ ОД11Н оборотбарабана каретка перемешае-г ..d расстояние, равное заданном:- шагу укладки гибкого элемента на барабане, выдерживая . таким образом соосное положение середины (оси) окна ДЛИ прохода гибкого элемента, образованного на каретке 3 роликами 6, и оси витка гибкого элемента, укладываемого на барабан. В случае нарушения соосного положения оси окна, образованного роликами, и оси витка гибкого элемента за счет погрешностей укладки на барабане гибкий элемент ст i клоняется от оси окна, образованного ролинами (в ту или другую сторону), и под воз действием натяжения нажимает на один из роликов 6, установленных на конце рычага 5. При этом рычаг 5 поворачивается вокру оси 4 и нажимает на соответствующий датчик 7, выдающий в электросхе1у1у сигнал, суммирующийся с постоянным сигналом одного из датчиков 11, кинематически связанных через рычаг 10 с поводком 9, поло жение которого определяет соответствую- шее ему направление движения каретки 3 и включает тем самым автономный привод 20 корректировки положения каретки в направлении, необходимом для исправления погреш ности укладки. Вращение от привода 20 через две зубчатые пары 19 и 18 сообшается солнечному колесу 17, обороты которого суммируются или вычитаются с оборотами солнечного колеса 15 через водило 13 с 3 11 3 W сателлитами 14. после чего резу.пьтируюи-ие обороты сообщаются ходовогу1у винту 2 от водила 13. . При достижении соосного положения оси окна, образованного роликами 6 на каретке., к оси винта гибкого элемента, укладываемого на барабан, автономный привод 20 автоматически отключается. В схеме предусмотрено ручное управление автономным приводом корректировки положения каретки при выходе из строя или отключении автоматического управления корректировкой. Формула изобретения Канатоукладчик, содержащий ходовой БИНТ, перемещающуюся по нему с помощью поводка карет1С1 устройство для корректировки положения каретки с автономным приводом и привод, кинематически связанный через дифференциал с барабаном, о тличающийся тем, что, с целью автоматизации корректировки положения каретки, последняя снабжена двумя парами датчиков, электрически связанных с автономным приводом, и двумя подпружиненными двуплечими рычагами, одними плечами контактирующими с одной парой датчиков и несущими на других концах направляю- I шие канат ролики, а на поводке шарнирно закреплен рычаг, поочередно взаимодействующий с каждым из другой пары датчиков. 1
