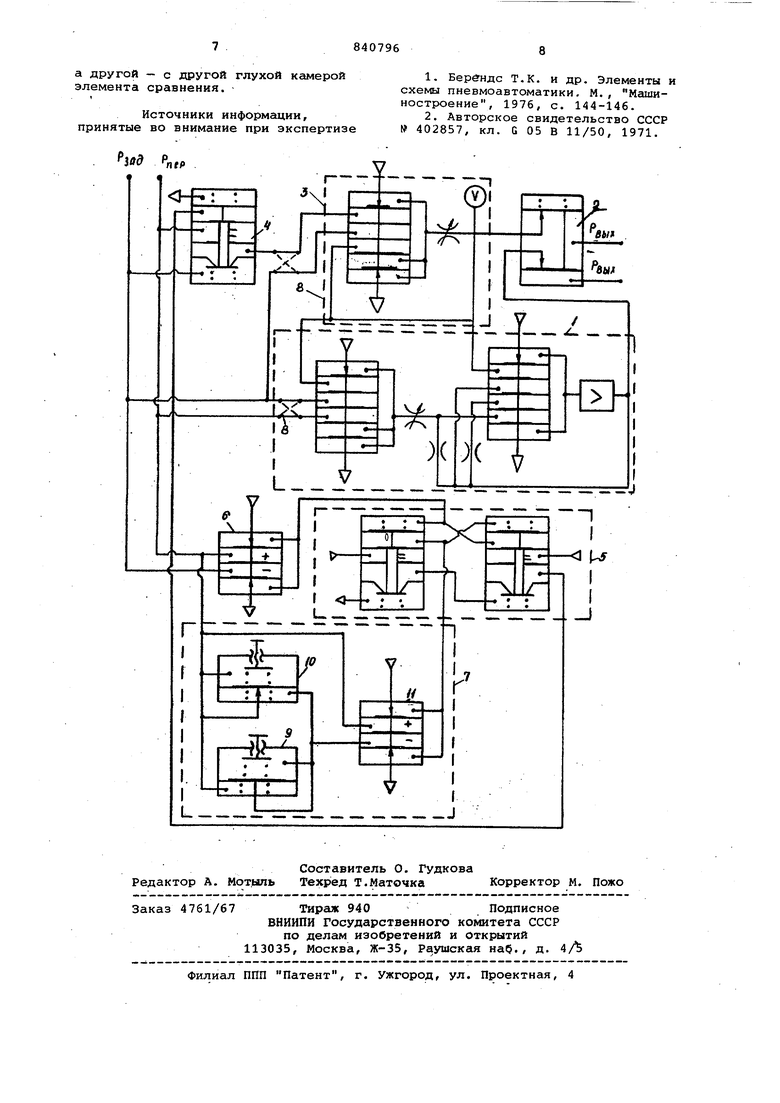
Изобретение относится к автоматическому регулированию и предназначено для применения в системах качественного автоматического регулиро вания параметров динамических объектов, преимущественно при их взрывопожароопасности, различных отраслей промышленности. Известен пневматический регулятор реализующий полупропорциональный закон регулиронания, содержащий последовательно соединенные сумматор, кла пан и усил.итель, причем осуществлена положительная обратная связь через узел непрерывно дискретной задержки на такт через сумматор и усилитель, который совместно с клапаном, управляющим входом, связан с выходом блок логики, а также последовательно соединенные второй сумматор, блок предварения, третий сумматор и сигнумреле, выход которого связан с входом блока логики, причем выход второго сумматора связан с входом третьего сумматора и вторым сигнум-реле, выход которого связан с вторым входом блока логики, а вторые входы сигнумреле связаны с входом второго сумматора tl. Наиболее близким к изобретению по технической сущности является пневматическое устройство для ступенчатого пропорционального регулирования, содержащее последовательно соединенные блок определения знака производной регулируемого параметра, блок логики, два клапана.и сумматор, а также пневматический элемент сравнения, выход которого связан с вторым входом блока логики, задатчик, выход которого связан с входами клапанов и пропорциональный регулятор- усилитель, выход которого связан с входом сумматора, причем блок определения знака производной сигнгша содержит последовательно соединенные генератор, импульсатор, узел непрерывно -дискретной задержки на такт, управляемое инерционное звено и элемент сравнения, на второй вход которого подается регулируемый параметр,-вход управления инерционного звена связан с выходом импульсатора и второй вход . блока логики связан с выходом второго элемента сравнения, выдающего сигнал знака отклонения регулируемоiro параметра от задаваемой величины L2.| . Указанное устройство сложно и не обеспечивает должного качества регулирования параметров динамических объектов, особенно при переходных процессах, так как указанные регуля ры предназначены для регулирования параметров инерционных объектов. Цель изобретения - создание упро щенного устройства для качественног регулирования параметров динамических объектов путем улучшения его ди намических характеристик. Поставленная цель достигается тем что пневматический регулятор содержит переключающее пневмореле и инте гратор с дифференциальными входами, соединенными с входным каналом зада ния и выходом переключающего пневмореле, входы которого подключены к входным каналам регулятора, а управ ляющий вход - к выходу логического блока, выход интегратора соединен со сдвигающим входом усилителя и вторым входом выключающего реле. Дополнительным отличием является также то, что блок .определения знака производ ной содержит элемент сравнения, одна из глухих камер которого соединена с входом блока, два повторителя со сдвигом, включенные по кольцевой схе ме, один полюс которой связан с входом блока, а другой - с другой глу.хой камерой элемента сравнения. На чертеже представлена принципиальная схема регулятора. Пневматический усилитель 1 с дифференциальным и сдвигающим входами выходом через пневматическое выключающее реле 2 связан с выходом регулятора Ppbix I входами - с соответствующими входными каналами Рпер Pjp, . Выключающее реле 2 вторым входом связано с выходом интегратора 3 с дифференциальным входом, а управляющим входом - с соответствующим каналом управления регулятора РВЫЧ Интегратор 3 с дифференциальным входом выходом также связан с сдвигающим входом усилителя 1. Дифференциальным входом один его вход непосредственно связан с одним из вход .ных каналов устройства f второй вход связан с выходом переключаю щего пневмореле 4. Переключающее пневмореле 4 входами связано с соответствунвдими входными каналами устройства и управляющим входом - с выходом логического блока 5, реализующего логическую функцию Неравнозначность. Входы блока 5 соответственно связаны с выходами элемента 6 сравнения и работающего в режиме порогового преобразователя .блока 7 определения знака производной. Вход блока 7 определения знака производной и одна из камер (положительная камера) элемента б сравнения связаны с входным каналом .P(,gp , на который подается регулируемый параметр, а другая - отрицательная камеpa элемента 6 сравнения связана с входным каналом, на который подается сигнал от задающего устройства. На входах усилителя 1 и интегратора 3 установлены механические переключатели 8, которые предназначены для установления отрицательной обратной связи в системе регулирования. В блоке 7 одномембранные повторители со сдвигами 9 и 10 включены по диодной схеме, соединены между собой последовательно кольцом и одним полюсом связаны с одной положительной, а ДРУГИМ полюсом - с другой отрицательной камерами пневматического трехмембранного элемента 11 сравнения, выход которого является выходом, а положительная камера - входом блока. Усилитель 1, интегратор 3 и блок 5 реализованы на пневматических элементах по стандартной схеме. Указанный регулятор реализует следующий закон регулирования в системе стабилизации X о, (kx - -cJxdt при X - X 0, , . io где у - -регулирующее воздействие; X - величина рассогласования регулируемого параметра с заданием;k - коэффициент усиления; с - коэффициент интегрирования; X - производная от х; D - фиксированное значение интегральной составляющей к моменту t; ): - текущее -время; tp- начало интегрирования. При нулевом значении рассогласования пропорциональная составляющая отсутствует и управляющее воздействие определяется интегральной составляющей, которая также не меняется. Поэтому в указанном .случае пригоден любой из законов, составляющих закон регулирования. Исходя из этого нулевые значения рассогласования и его производной отождествлены с их отрицательными или положительными значениями и в законе регулирования отсутствуют, что позволяет реализовать его с применением двухпозиционных элементов в качестве пороговых преобразователей. Регулятор работает следующим образом. Допустим, регулируемый параметр меняется синусоидально. При положительности рассогласования и его производной на выходах элемента б сравнения и блока 7 формируются единичные сигналы, а на выходе блока 5 - нулевой сигнал. Следовательно, управляющий сигнал пневмореле 4 отсутствует и через него проходит сигнал задания, подаваемый на вход интегратора 3. На второй вход интегра тора 3 также поступает сигнал задани и его выход во времени не изменяется Таким образом, на в лходе усилителя 1 формируется регулирующее воздействие согласно пи-закону 3 kx ч-Э, где ® меняющийся выходной сигнал интегратора 3. После изменения знака производной рассогласования меняется выходной си нал блока 7 на нулевой, с выхода бло ка 5 на пневмореле 4 поступает единичный управляющий сигнал и через него на вход интегратора 3 подают ре гулируемый параметр. Так как на втором входе интеграто ра 3 поступает сигнал задания, его выход меняется во времени по величи не рассогласования и навыходе усилителя 1 формируется регулирующее воздействие согласно ПИ-закону: .-t у kx + cjxdt. Указанный закон обеспечивает пол ную воспроизводимость задающего воз действия. Далее изменяется знак рассогласования и на выходах элемента 6 и блока 5 формируются нулевые сигналы, в результате чего прекращено интегрирование и реализован ПИ-закон регулирования, а после изменения знака производной рассогласования на выходах блока 7 и блока 5 формируются единичные сигналы, на вход интегратора 3 через пневмореле 4 подают ре гулируемый параметр и на выходе регулятора формируется регулирующее воздействие согласно ПИ-закону. Прекращение интегрирования при удалении регулируемого параметра от задания позволяет уменьшить перерегулирование и повысить качество переходного процесса, а продолжение интегрирования при сближении регули руемого параметра к заданию способствует повышению качества регулирования как при переходном, так и при установившемся процессе, что выража ется в уменьшении времени переходно го процесса и сведения статической ошибки к нулю. I Блок 7 определения знака производной функционирует следующим обра зом. При увеличении сигнала на его вх де повторитель со сдвигом 10 заперт а повторитель со сдвигом 9 начинает пропускать сигнал после превышения им установленного на нем порога. В результате этого на его выходе сигнал отстает в изменении от входного сигнала на величину Д , которая соответствует порогу чувствительности элемента 11 сравнения, так как в его плюсовую камеру подается тот же входной сигнал, на его выходе сформируется единичный сигнал. При уменьшении входного сигнала повторитель со сдвигом 9 заперт, а повторитель со сдвигом 10 начинает пропускать сигнал после снижения входного сигнала на величину д . Таким образом, в отрицательной камере элемента 11 сравнения- сигнал отстает от .входного сигнала в изменении на величину Д и на его выходе формируется нулевой сигнал. Экономический эффект от внедрения предложенного устройства достигается за счет удешевления устройства и уменьшения его эксплуатационных издержек, а также улучшения качества продукции за счет качественного ведения технологического режима путем качественного регулирования технологических параметров, что (по предварительным расчетам) составляет 1 тыс. руб. Ь год на один регулятор. Формула изобретения 1.Пневматический регулятор, содержащий усилитель с дифференциальными подключенными к входным каналам регулятора входами и сдвигающим входом, выход усилителя через выключающее реле соединен с выходом регулятора,, управляющий вход выключающего реле связан с каналом управления регулятора, входные каналы регулятора подключены к управляющим камерам элемента сравнения, выход которого соединен с первым входом логического блока, второй вход которого подключён к выходу блока определения знака производной, вход которого соединен с входным каналом переменной, отличающийся тем, что, с целью улучшения динамических характеристик регулятора, он содержит переключающее пневмореле и интегратор с дифференциальными входами, соединенными с входным каналом задания и выходом переключающего пневмореле, входы которого .подключены к входным каналам регулятора, а управляющий вход - к выходу логического блока, интегратора соединен с сдвигающим входом усилителя и вторым входом выключающего реле. . 2.Регулятор по п. 1, о .т л и чающийся тем, что блок определения знака производной содержит элемент сравнения, одна из глухих камер которого соединена с входом блока, два повторителя со сдвигом, включенные по кольцевой схеме, один полюс которой связан с входом блока,;
а другой - с другой глухой камерой элемента сравнения.
Источники информации, принятые во внимание при экспертизе
Pjtf Р,
ntP
1.Берйндс Т.К. и др. Элементы и схемы пневмоавтоматики. М. , Мгиаиностроение, 1976, с. 144-146.
2.Авторское свидетельство СССР 402857, кл. G 05 В 11/50, 1971.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1979 |
|
SU849140A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU640254A1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| Пневматическое устройство управления | 1976 |
|
SU632987A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| РЕГУЛЯТОР С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1972 |
|
SU354399A1 |
| Пневматическое регулирующее устройст-BO | 1978 |
|
SU802920A1 |
| ПНЕВМАТИЧЕСКИЙ КВАЗИОПТИМАЛЬНЫЙ РЕГУЛЯТОР | 1970 |
|
SU268768A1 |
