Изобретение относится к манииуляторам и может найти применение в микроэлектронной технологии для манипулирования диэлектрическими пластинами. Оно может быть также использовано в других областях техники, где необходимо осуществлять захват, переноску и оперирование с мелкими плоскими д 1электрическими объектами, например при производстве слюдяных конденсаторов. Для этого наиболее широко используются вакуумные манипуляторы. Основу их конструкции составляет полый корпус, обычно в виде трубки. К одной стороне корпуса присоединен наконечник с одним или несколькими отверстиями. Отверстия через нолость корпуса и штуцер на другом конце корпуса соединены с откачной системой. На корпусе имеется коммутатор, который в простейшем случае представляет собой отверстие, соединяющее внутреннюю полость корпуса с атмосферой. Для закрепления объекта отверстие коммутатора перекрывается, и наконечник прикладывается к объекту. Объект нри этом присасывается к наконечнику и удерживается на нем за счет разности давлений внутри корпуса и атмосферного. При откры-вании отверстия (коммутатора) давление снаружи и внугри корпуса выравнивается, и объект перестает удерживаться на наконечнике манипулятора. Однако при.менение вакуумных манипуляторов связано с необходимостью использования дорогого и громоздкого оборудования; работа с вакуумными манипуляторами требует создания вакуумных коммуникаций, то есть подвода вакуумных шлангов ко всем местам, где предусматривается работа с манипулятором. Это усложняет и удорожает устройство, делает возможным его использование только на конкретных рабочих местах; лри работе с вакуумными манипуляторами неизбежны прососы воздуха, что создает движение воздуха и увеличивает возможность осаладения пыли на объекте манипулирования; кроме того, манипуляторы неприменимы в условиях вакуума, так как принцип их действия основан на перепаде давления внутри манипулятора н в окружающей среде. Цель предлагаемого изобретения - создание дешевого переносного манипулятор, и обеспечение возможности его работы в вакууме. Для этого наконечник снабжен двумя электродами, присоединенными через коммутатор к источнику напряжения. Пеоднородное электростатическое поле создается системой электродов, расположенных на наконечнике манипулятора. Поле, возникающее вблизи рабочей поверхности наконечника, при приложении к электродам разности потенциалов, но существу, является полем
3
рассеяния. Его напряженность HiMeei максимальное значение у поверхности электродов и быстро убывает с расстоянием. Таким образом, при приложении наконечника с электродами к объекту манипулирования, последний будет удерживаться на наконечнике до тех пор, пока на электроды подано питающее напряжение.
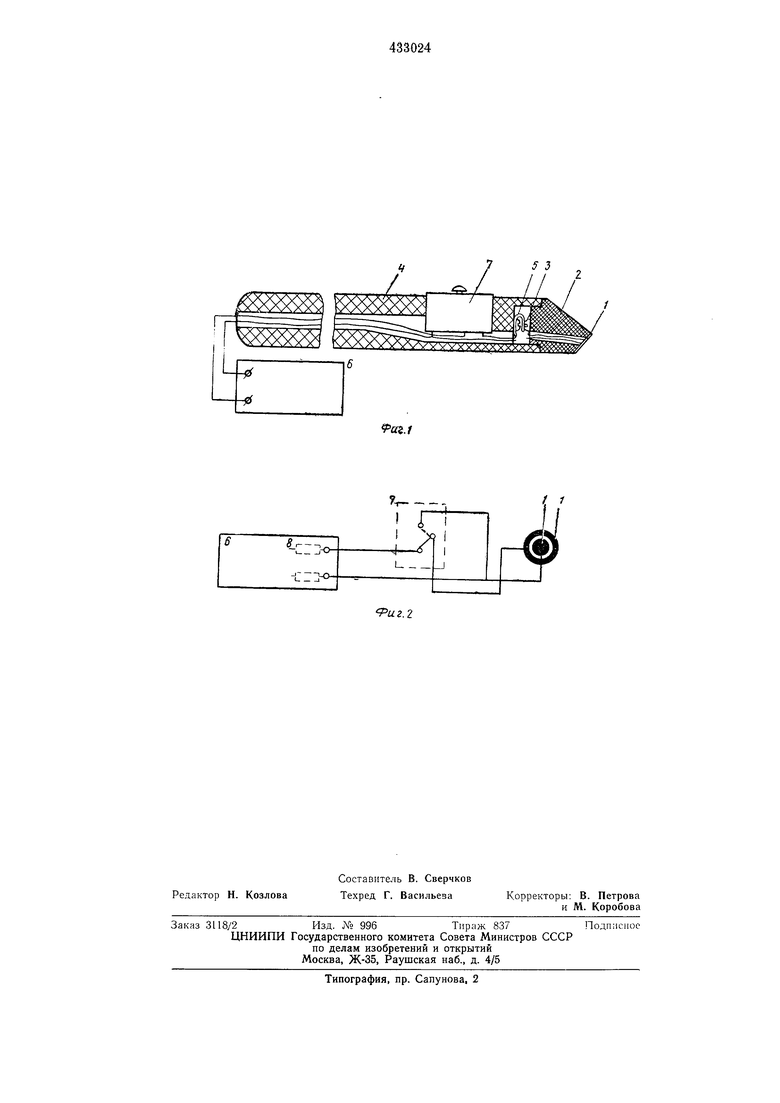
На фиг. 1 изображен предлагаемый манипулятор в разрезе; па фиг. 2 - схема включения манипулятора.
Основным элементо.м манипулятора являются два плоских электрода 1. Они расположены в одной плоскости на наконечнике 2. Электроды могут быть выполнены в различных вариантах, например в виде монолитных проводпиков, закрепленных на наконечнике или запрессованных в него, а также в виде пленочных проводников, сфор.мированных методами вакуумного испарения или толстоаленочной технологии. Возможны различные конфигурации электродов, например в виде полос, расположенных таким образом, что проводники с одним потенциалом чередуются с проводниками, имеющими другой потенциал; в виде сдвоенной спирали. Электроды могут быть также расположены коаксиально, как показано на фиг. 2. Размеры электродов различны и определяются размерами объекта манипуляции. Выводы электродов пропущены в отверстие наконечника и закреплены на контактных винтах 3. Наконечник присоединен к корпусу 4 манипулятора. Корпус манипулятора содержит лепестки 5, соединяющиеся с контактными винтами 3 при закреплении наконечника в корпусе. Лепестки 5 в свою очередь соединены с источником питания 6 через коммутатор (тумблер) 7, которым осущест4
вляется подача и снятие с электродов напряжения. Корпус манипулятора и наконечник изготавливаются из диэлектрического материала, например из эбонита. Для обеспечения безопасности работы электроды покрыты слоем нитроэмали. Безопасность устройства наряду с диэлектрическим покрытием обеспечивается балластными сопротивлениями 8, включенными в оба выхода источника питания 6.
Манипулятор работает следующим образом.
Источник питания 6 включают в сеть. Затем манипулятор подносят к объекту так, чтобы плоскость электродов 1 прилегала к поверхности объекта. После включения ко.ммутатора 7 на электроды 1 подается напряжение, и за счет сил, возникающих в неоднородном электростатическом поле, объект закрепляется на электродах. При этом можно выполнять любые операции, например переноску, визуальный контроль, маркировку объекта, нанесение паст и покрытий на него и т. д. Отпусканием кнопки коммутатора электроды отключаются от источника питания, закорачиваются, и объект перестает удерживаться манипулятором.
Предмет изобретения
Манипулятор, содержащий корпус с наконечником и коммутатор, отличающийся тем, что, с целью удещевления, а также обеспечения транспортабельности и возможности работы в вакууме, наконечник снабжен двумя электродами, присоединенными через коммутатор к источнику напряжения.
5 3
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1975 |
|
SU518330A2 |
| УСКОРИТЕЛЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ УПРАВЛЯЕМОЙ РЕАКЦИИ ТЕРМОЯДЕРНОГО СИНТЕЗА | 1999 |
|
RU2175173C2 |
| Манипулятор | 1978 |
|
SU752706A1 |
| Схват манипулятора | 1980 |
|
SU944921A1 |
| ЭЛЕКТРОМЕХАНИЗМ МИКРОСТРУКТУРНЫЙ НИТЕВИДНЫЙ | 2004 |
|
RU2281909C2 |
| СИСТЕМА ЭЛЕКТРОСТАТИЧЕСКОГО РАСПЫЛЕНИЯ | 2011 |
|
RU2500483C1 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА НА ПОТОКЕ ПЛАЗМЫ | 2015 |
|
RU2597205C1 |
| Пьезостимулятор | 1991 |
|
SU1816576A1 |
| РЕКУПЕРАТОР ЭНЕРГИИ ПОЛОЖИТЕЛЬНО ЗАРЯЖЕННЫХ ИОНОВ | 2016 |
|
RU2617689C1 |
| УСТАНОВКА ДЛЯ ВОССТАНОВЛЕНИЯ КАЧЕСТВА РАБОЧИХ И ДИЭЛЕКТРИЧЕСКИХ ЖИДКОСТЕЙ | 2018 |
|
RU2694667C1 |
1
