(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегральный высокочастотный микроэлектромеханический переключатель емкостного принципа коммутации с высоким коэффициентом емкости | 2023 |
|
RU2823127C1 |
| Интегральный высокочастотный микроэлектромеханический переключатель емкостного принципа коммутации с высоким коэффициентом емкости | 2023 |
|
RU2829031C1 |
| Интегральный микромеханический гироскоп | 2021 |
|
RU2778622C1 |
| Емкостный преобразователь давления | 1990 |
|
SU1778576A1 |
| МАНИПУЛЯТОР | 1973 |
|
SU433024A1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПЕРЕКЛЮЧАТЕЛЬ | 2021 |
|
RU2802162C2 |
| Защитный разрядник | 1981 |
|
SU1026214A1 |
| МАГНИТНОЕ И/ИЛИ ЭЛЕКТРОСТАТИЧЕСКОЕ ПРОТИВОУДАРНОЕ УСТРОЙСТВО | 2011 |
|
RU2565323C2 |
| Схват манипулятора | 1980 |
|
SU944921A1 |
| ПЬЕЗОСТИМУЛЯТОР | 1999 |
|
RU2161051C1 |
1
Изобретение относится к электростатическим крепежным устройствам, предназначенным для оперирования проводящими и полупроводящими объектами, и может найти применение в планарной технологии полупроводниковых приборов и интегральных .схем на тех операциях, где необходимо манипулировать пластинами из полупроводниковых материалов.
Известен электростатический манипулятор для диэлектрических пластин по авт. св. NO 433О24, в котором используется взаимодействие электрических зарядов в пластине с электростатическим полем манипулятора. Этот манипулятор снабжен наконечником с двумя электродами, подключенными через коммутатор к источнику напряжения. Основные элементы манипулятора - электроды - расположены на наконечнике выполнены в виде монолитных проводников, закрепленных на наконечнике, запрессованных в него или нанесенных в виде пленок на поверхность наконечника. Недостатком такого манипулятора является невысокая надежность работы. Это связано с тем, чт
электроды имеют плоские рабочие поверхности и жестко укреплены так, что эти поверхности лежат в одной плоскости. Эта плоскость является рабочей и именно на ней фиксируется закрепляемая плата. Ддя того, чтобы захватить пластину с помощью известного манипулятора, его рабочую плоскость необходимо с высокой точностью ориентировать параллельно плоскости пластины. В
случае отсутствия параллельности сгпа электростатического притяжения пласт Ш1 к рабочей поверхности оказывается недостаточной для удержания.
Целью изобретения является повышение
надежности работы манипулятора.
Это достигается тем, что один электрод становлен с возможностью перемещения и снабжен контактной площадкой со сквозным вырезом, а другой, выполненный из полупроводникового материала, имеет выпуклую поверхность, обращенную в сторону первого электрода и расположенную напротив вьфеза в контактной площадке первого электрода. На фиг. 1 изображен один из возможных
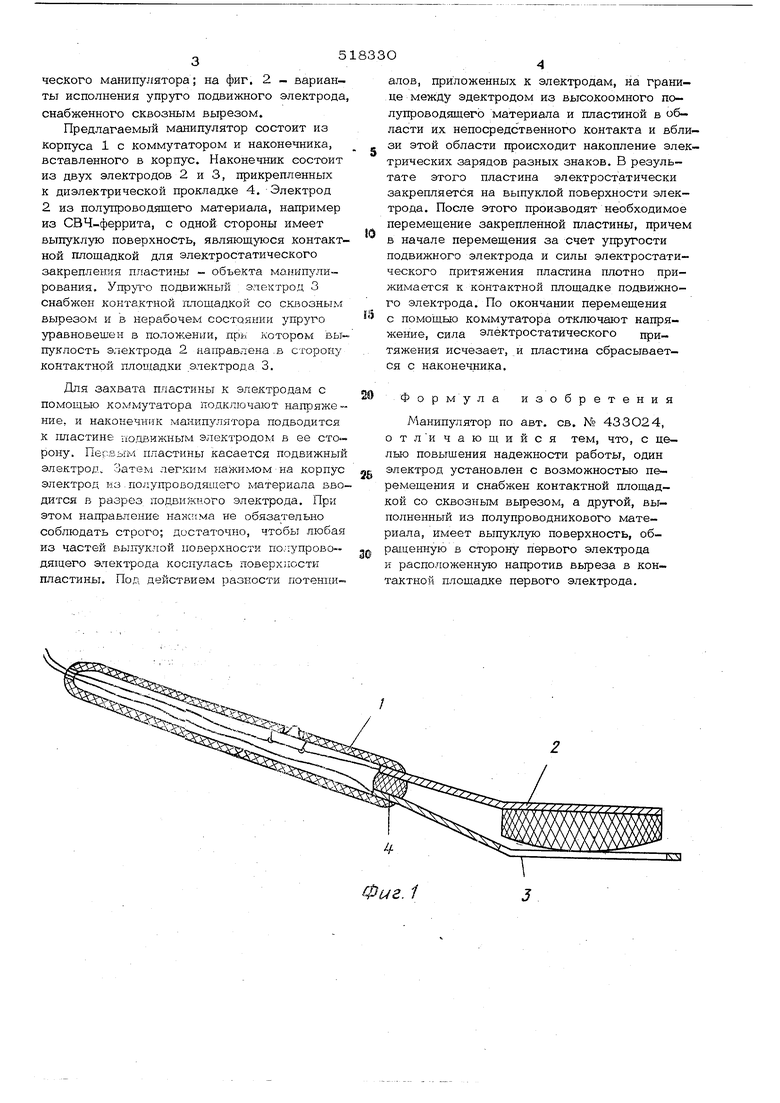
онструктивных вариантов электростати-
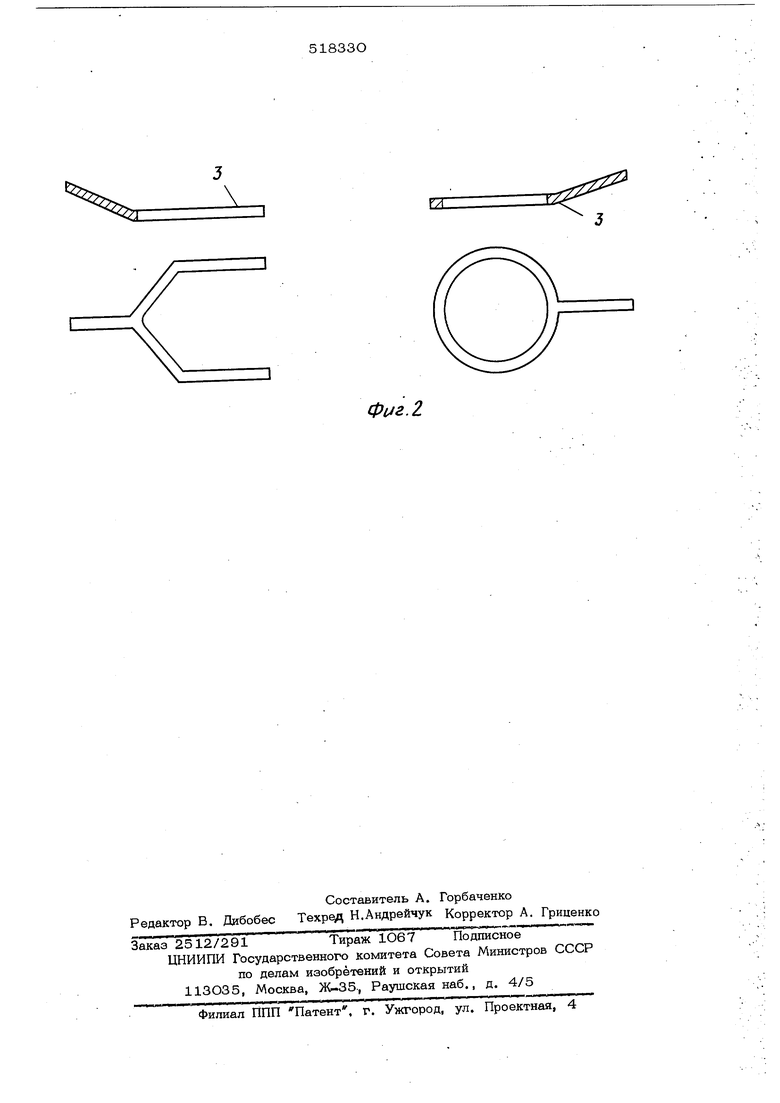
ческого манипулятора; на фиг. 2 - варианты исполнения упруго подвижного электрода, снабженного сквозным вырезом.
Предлагаемый манипулятор состоит из корпуса 1 с коммутатором и наконечника, вставленного в корпус. Наконечник состоит из двух электродов 2 и 3, прикрепленных к диэлектрической прокладке 4. Электрод 2 из полупроводящего материала, например из СВЧ-феррита, с одной стороны имеет выпуклую поверхность, являющуюся контактной площадкой для электростатического закрепления пластины - объекта манипулирования. подвижный электрод 3 снабжен контактной площадкой со сквозным вырезом и в нерабочем состоянии упруго уравновешен в положении, прь: котором 1зыпуклость электрода 2 ааправлена.в сторону Контактной площадки электрода 3.
Для захвата пластины к электродам с помощью коммутатора подключают напряже ние. и наконечник манипулятора подводится к пластине подвижным электродом в ее сторону. Первым пластины касается подвижный электрод. Затем легким нажимом-на корпус электрод из.полупроводящего материала вводится в разрез подвижного электрода. При этом направление наясима не обязательно соблюдать строго; достаточно, чтобы любая из частей выпуклой поверхности полупрово- дящего электрода коснулась поверхности пластины. Под действием разности потении-
алов, приложенных к электродам, на границе между эдектродом из высокоомного полупроводкодего материала и пластиной в области их непосредственного контакта и вблзи этой области происходит накопление элетрических зарядов разных знаков. В результате этого пластина электростатически закрепляется на выпуклой поверхности электрода. После этого производят необходимое перемещение закрепленной пластины, причем в начале перемещения за счет упругости подвижного электрода и силы электростатического притяжения пластина плотно прижимается к контактной площадке подвижного электрода. По окончании перемещения с помощью коммутатора отключают напряжение, сила электростатического притяжения исчезает, и пластина сбрасывается с наконечника.
Формула изобретения
Манипулятор по авт. св. № 433О24, отли чающийся тем, что, с це- лыо повышения надежности работы, один электрод установлен с возможностью перемещения и снабжен контактной площадкой со сквозным вырезом, а другой, выполненный из полупроводникового материала, имеет выпуклую поверхность, обращенную в сторону первого электрода и расположенную напротив выреза в контактной площадке первого электрода.
JL
Ел.
