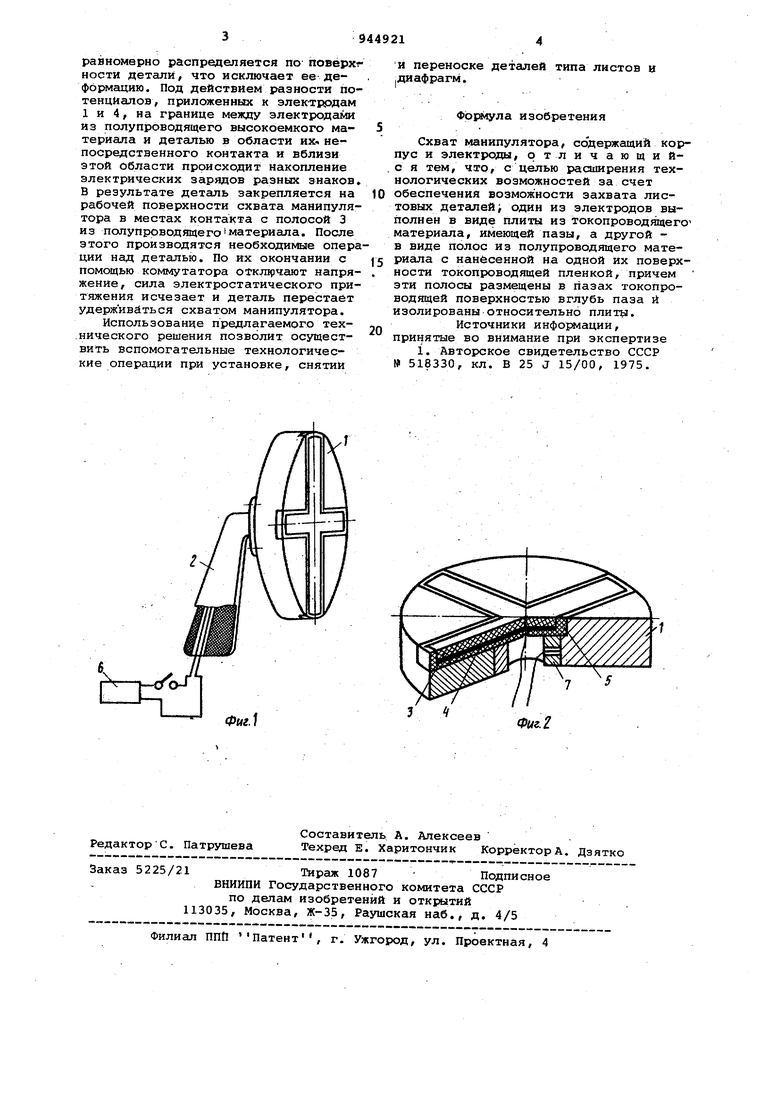
Изобретение относится к электростатическим крепежным устройствам, предназначенным для оперирования про водящими и полупроводшцими объектами в частности к TeNt областям техники, где требуется осуществлять захват, перенооку и установку плоских деталей малой толщины и больших размеров из полупроводящих и проводящих материал Известен схват манипулятора, содержащий корпус и электроды {. Недостатком известного схвата манипулятора являются узкие технологические возможности, выраженные в том что данный схват не может захватыват листовые детсши. Цель изобретения - расширение технологических возможностей за счет зах вата листовых деталей. Цель достигается тем, что один из электродов выполнен в виде плиты из токопроводящего материала, имеющей пазы, а другой - в виде полос из полупроводящегсз материала с нанесенной одной их поверхности токопроводящей пленкой, причем эти полосы размещены в пазг1х токопроводящей поверхностью вглубь паза и изолированы относительно плиты. На фиг. 1 изображен схват манипулятора, общий вид; на фиг. 2 - устройство рабочей части схвата манипулятора. Схват манипулятора состоит яз корпуса if который является электродом. К корпусу крепится (крепеж не показан) ручка 2. Б пазах электрода 1 находятся полосы 3 из полупроводящего материала, нижняя поверхность которых металлизирована пленкой 4 и представляет собой второй электрод. Электрод 1 и полосы 3 из полупро)водящего материала изолированы друг от друга по внутреннему объему прокладкой 5. Электроды 1 и 4 соединены с источником б высокого напряжения. Соединенные провода изолирюваны от корпуса 1 вставкой 7. Охват работает следующим образом. Для захвата детали к электродам 1 и 4 через коммутатор подключается напряжение, и рабочая поверхность подводится к детали. За счет большого размера поверхности плоскости детали и схвата манипулятора хорошо ориентируются параллельно друг другу. Пересекающиеся полосы позволяют работать с деталями различных размеров. При нажиме манипулятором давление равномерно распределяется по поверхг нести детали, что исключает ее деформацию. Под действием разности потенциалов, приложенных к электррдам 1 и 4, на границе между электродами из полупроводящего высокоемкого материала и деталью в области их непосредственного контакта и вблизи этой области происходит накопление электрических зарядов разных знаков В результате деталь закрепляется на рабочей поверхности схвата манипулятора в местах контакта с полосой 3 из полупроводящегоматериала. После этого производятся необходимые опера ции над деталью. По их окончании с помощью коммутатора отклч чают напряжение, сила электростатического притяжения исчезает и деталь перестает удерживаться схватом манипулятора. Использованче предлагаемого тех.нического решения позволит осуществить вспомогательные технологические операции при установке, снятии и переноске деталей типа листов и .диафрагм. Формула изобретения Схват манипулятора, ссэдержащий корпус и электроды, ртличающийс я тем, что, с целью расширения технологических возможностей за счет обеспечения возможности захвата листовых деталей; один из электродов выполнен в виде плиты из токопроводящего материала, имеющей пазы, а другой в виде полос из полупроводящего материала с нанесенной на одной их поверхности токопроводящей пленкой, причем эти полосы размещены в пазах токопроводящей поверхностью вглубь паза и изолированы относительно плиты. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 518330, кл. В 25 J 15/00, 1975.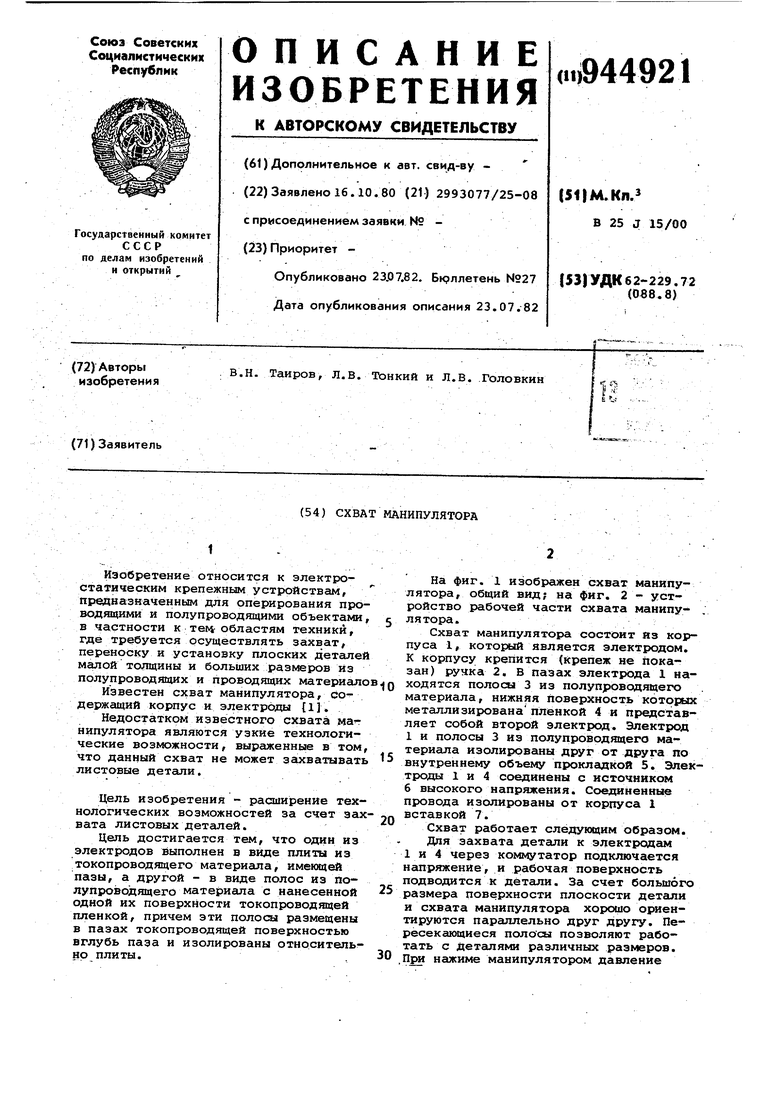
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1984 |
|
SU1175692A1 |
| Пневмо-электростатический манипулятор | 1979 |
|
SU856790A1 |
| Схват манипулятора | 1985 |
|
SU1320057A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОСТАТИЧЕСКОГО УСТРОЙСТВА ДЛЯ КРЕПЛЕНИЯ ДЕТАЛЕЙ ИЗ НЕМАГНИТНЫХ МАТЕРИАЛОВ | 1990 |
|
RU2016735C1 |
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1442398A1 |
| Электростатическое крепежное устройство | 1973 |
|
SU454654A1 |
| ЭЛЕКТРОСТАТИЧЕСКОЕ ЗАКРЕПЛЯЮЩЕЕ УСТРОЙСТВО | 1990 |
|
RU2027584C1 |
| Схват | 1984 |
|
SU1301693A1 |
| Схват манипулятора для роботизированной сборки сварных конструкций | 1989 |
|
SU1726237A1 |
| Схват промышленного робота В.Г.Вохмянина | 1987 |
|
SU1505776A1 |
