1- X .
Известны устройства для передвижки зданий и сооружений, содержащие ходовую ;посредством приводного механизма несуи1ую раму, перемещающуюся на катках по неподвижным лежням. Для обеспечения передвиж ки здания или сооружения по сложным траекториям приводные механизмы вьтолнены в виде нескольких разнотипных гидродомк ратов с индивидуальны т скоростякш выдвижеш{я штоков гидроцилиндров, а следовательно, с индивидуальными диаметрами гидроцилиндров. Однако подбор отдельных 1П1д;родомкратов со штоками довольно сложен. Скорости их выдвижения должны строго соответствовать необходимой скорости передвижения отдельных точек крепления гидродомкрата к зданию или сооружению. Отсутствие координации в работе гидродомкратов может привести к разрушению перемешаемого объекта.
Целью изобретения является обеспечение передвижения зда1шя по сложным траекториям и движения различных его участков с запанны ми гкоростями.
Это достигается тем, что приводной механизм выполнен в виде параллельно установленных однотипных гидродомкратов с насоса п1 переменной производительно ги.
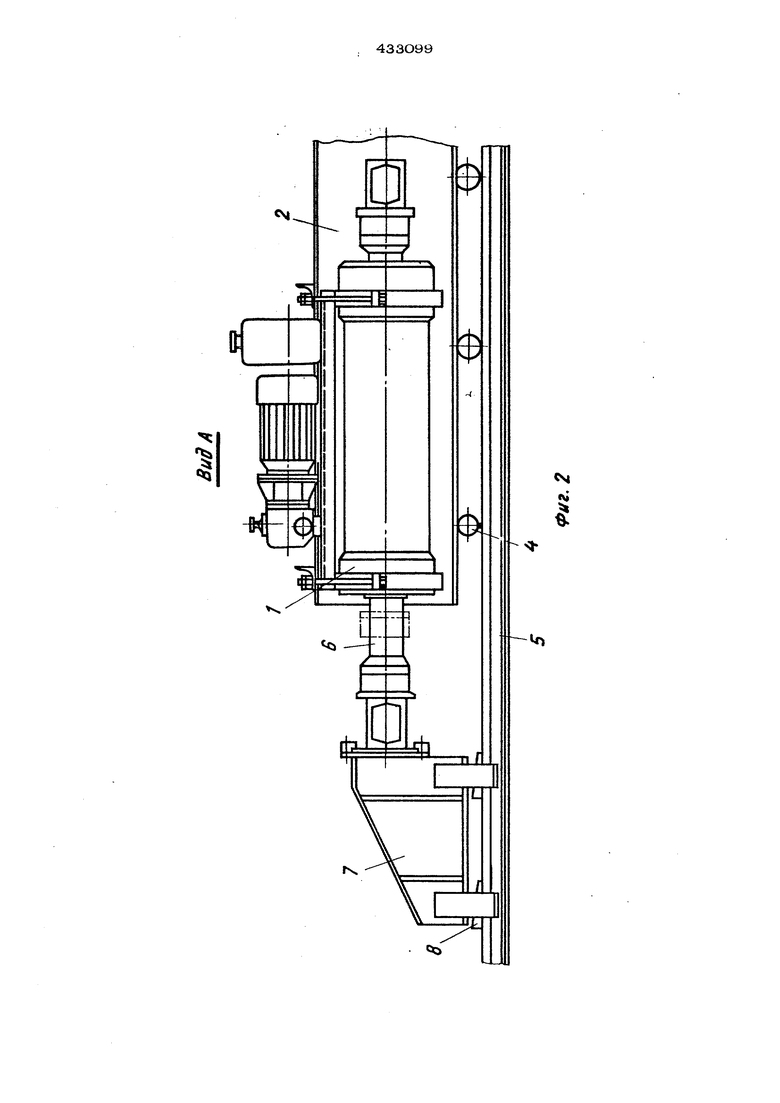
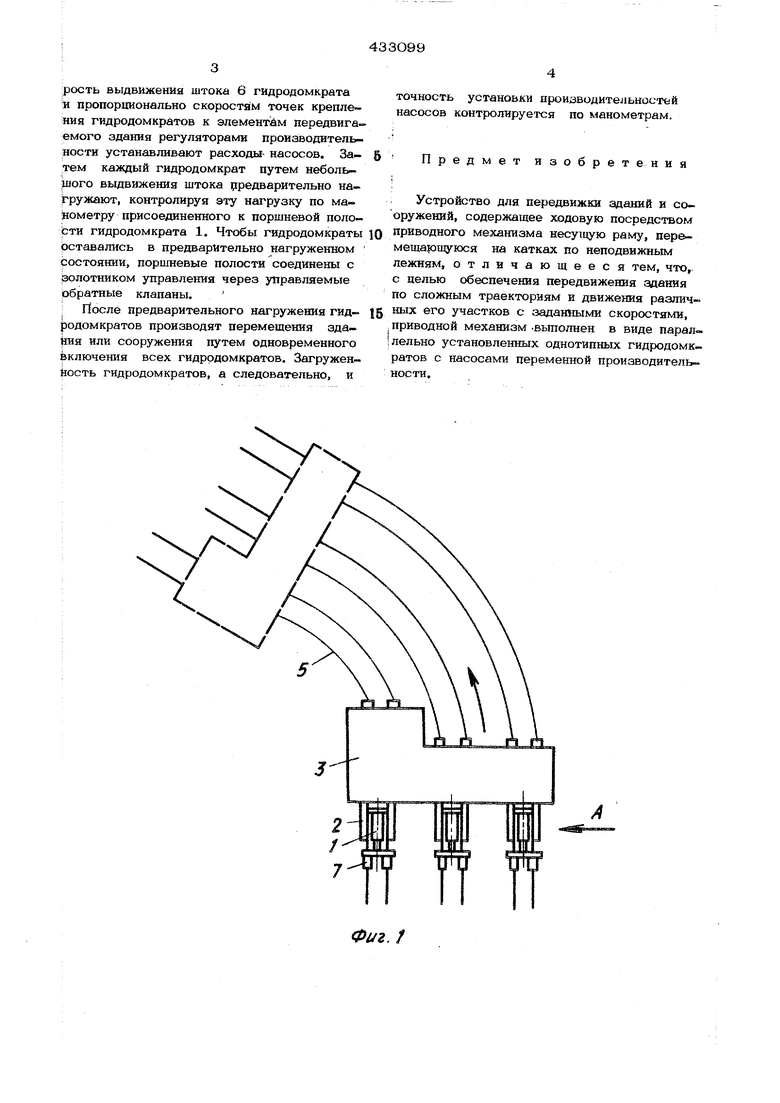
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - вид ncj стрелке А на фиг. 1.
Устройство содержит приводной механизм состоящий из группы гидродомкратов 1 С насосами переменной производительное и, закрепленных на ходовых балках 2, на кг торых устанавливается перемешаемое здание или сооружение 3. Ходовые балки на катках 4 перемещаются по лежням 5. Шток 6 гидродомкрата упирается в упор 7, нрикреплегшый к лежням при помощи клиньев 8
Гидродомкраты устройства защ)епляю1 одними башмаками к ходовым банкам 2 передвигаемого здания или сооружения, а другими башками упирают в неподвижно аакрепленныё упоры 7. Сложную траектории ; движения передвигаемого здания ра тбивают на ряд простеЙ иих.
Для каждого гидродомкрата 1 и hajtirtui O прогтейшего движения рассчитывают гко.,
рость выдвижения штока 6 гидродомкрата и пропорционально скоростям точек крепления гвдродомкратов к элeмвнтiйм передвига емого здания регуляторами производительности устанавливают расходы- насосов. Затем каждый гидродомкрат путем небольшого выдвижения штока рредварительно нагружают, контролируя эту нагрузку по маиометру присоединенного к поршневой полости гидродомкрата 1. Чтобы гидродомкраты оставались в предварительно нагруженном состоянии, поршневые полости соединены с золотником управления через управляемые обратные клапаны.
: После предварительного нагружения гид|)одомкратов производят перемещения зда|1ия или сооружения путем одновременного ёключения всех гидррдомкратов. Загруженйость гидродомкратов, а следовательно, и
точность установки производительностей насосов контролируется по манометрам.
Предмет изобретения
Устройство для передвижки зданий и сооружений, содержащее ходовую посредством приводного механизма несущую раму, перемеща|ошуюся на катках по неподвижным лежням, отличаюшееся тем, что,, с целью обеспечения передвижения эдания по сложным траекториям и движения различных его участков с заданными скоростями, ; приводной механизм -вьшолнен в виде парал- лельно установленных однотипных гидродомкратов с насосами переменной производительности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1968 |
|
SU213753A1 |
| МЕХАНИЗИРОВАННЫЙ ЩИТОВОЙ КОМПЛЕКС ДЛЯ СООРУЖЕНИЯ ТОННЕЛЕЙ СО СБОРНОЙ ОБЖАТОЙ В ПОРОДУ ОБДЕЛКОЙ | 1988 |
|
RU2018677C1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ | 1972 |
|
SU353047A1 |
| Механизированная крепь для выемки угля с закладкой выработанного пространства | 1977 |
|
SU693028A1 |
| ВСЕСОЮЗНАЯ 1 |1дтЕет110-тЕхнн'1?ен*а) | 1973 |
|
SU381789A1 |
| Механизированная штрековая крепь | 1990 |
|
SU1721254A1 |
| Механизированная крепь | 1984 |
|
SU1196513A1 |
| Пневмобаллонная крепь | 1979 |
|
SU815313A1 |
| Устройство для управления перемещением базы механизированной крепи | 1980 |
|
SU877058A1 |
| Механизированный очистнойКОМплЕКС СОВМЕщЕННОй ВыЕМКи | 1978 |
|
SU798315A1 |