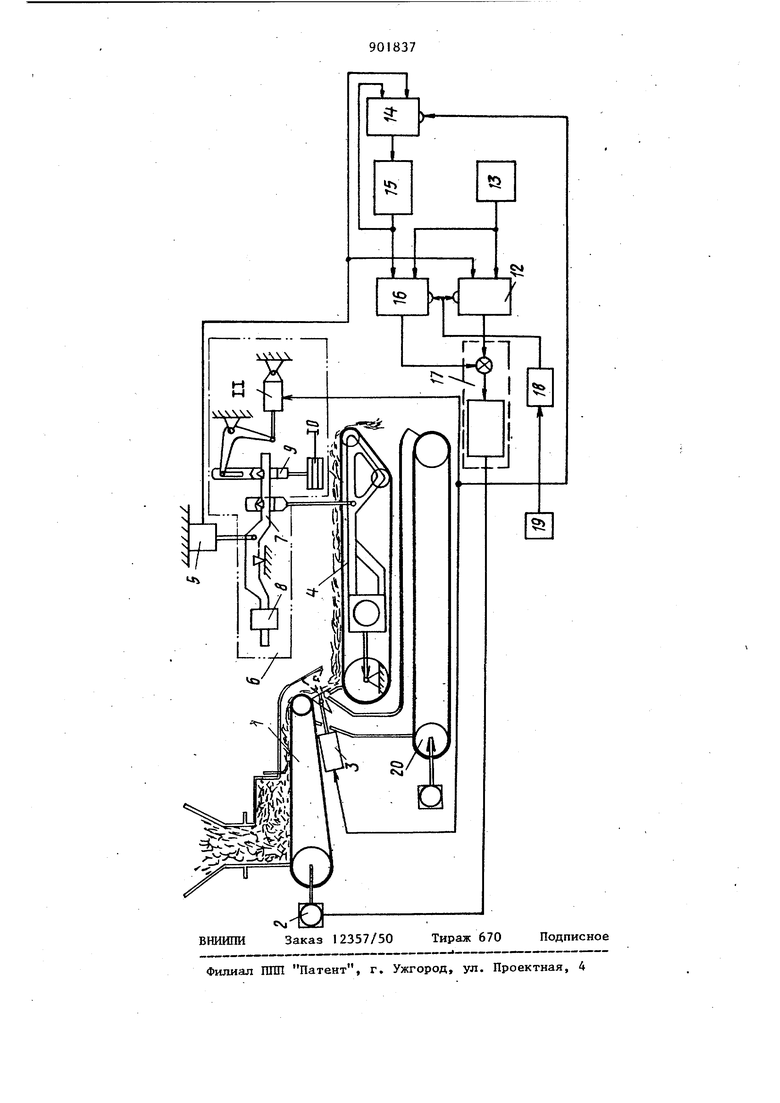
Изобретение относится к весоизмерительной технике, в частности к уст ройствам для непрерывного весового дозирований сыпучих материалов. Известен весовой дозатор непрерыв ного действия, содержащий ленточный конвейер с встроенным под ленту весоизмерительным узлом Весоизмерител ный узел этого дозатора состоит из грузрприемной рамы, одним концом опирающейся на шарнир, а другим - на преобра;зователь силы. Внутри грузоприемной рамы встроен подъемный механизм, содержащий рычаг, на одном плече которого установлен ролик и подъемный механизм с приводом, а на другом - захват с калибровочными гирями Эти средства калибровки позволяют в процессе подачи материала осу ществлять поверку силоизмерительного преобразователя 1 . Недостатком устройства является низкая точность калибровки, связанная с влиянием на метрологические характеристики жесткости конвейерной ленты. Наиболее близким к предлагаемому является весовой дозатор непрерывного действия, содержащий питатель, связанный через распределитель материала с дополнительным конвейером и грузоприемным .конвейером, силоизмеритольный преобразователь которого подключен к первому входу коммутатора, второй вход которого подключен к задатчику опорного сигнала, а выход - к первому входу формирователя сигнала управления, выход которого соединен с приводом питателя, и блок управления, подключенный к приводу распределителя материала. В известном устройстве для выполнения периодической поверки грузоприемного конвейера с силоизмерительным преобразователем осуществляется переключение подачи материала на дополнительный конвейер и после освобождения грузоприемного конвейера от материала выполняются операции установки нуля силоизмерительного преобразователя или его калибровка с помощью эталонных грузов Il. Недостатком известного устройства является необходимость присутствия людей при выполнении поверочных и калибровочных работ непосредственно в месте установки дозатора кроме того, в режимах длительной не прерьшной работы дозатора- без остановки технологического процесса, особенно связанных с подачей пьшящих и токсичных материалов, периоди ческое выполнение поверочных работ вообще исключается, что приводит к повышению погрешности дозирования. Цель изобретения - повьшение точ ности дозирования при длительной работе. Поставленная цель достигается тем, что в дозатор введены узел нагружения нормирующей нагрузкой с пр водом, первый и второй дополнительные коммутаторы, блок памяти и блок задержки команды, причем силоизмерительный преобразователь соединен с одним входом первого дополнитель ого коммутатора, выход которого через блок памяти связан с другим своим входом и с одним входом второ го дополнительного коммутатора, дру гой вход которого соединен с задатчиком опорного сигнала, а выход со вторым входом формирователя сигнала управления, при этом блок управления соединен с приводом узла нагружения нормирукнцей нагрузкой и с управляю14им входом первого допол1штельного коммутатора, а управл ющие входы коммутатора и второго дополнительного коммутатора связаны с блоком управления через блок Задержки команды. . I На чертеже показана йхема весов го дозатора непрерывного действия. Дозатор содержит питатель 1 с приводом 2, распределитель 3 матер ала, грузоприемный конвейер 4 с силоизмерительным преобразователем 5 и узлом 6 нагружения номирующей нагрузкой, состоящий из грузоприемного рычага 7 с тарным противовесом 8 и тягой 9, нормированного груза 10 и привода 11. Силоизмерительный преобразователь 5 своим выходом подсоединен к первому входу коммутатора 12, ко второму входу которого подключен задатчик 13 опорного сигнала, выход силоизмерительного преобразователя 5подсоединен также к одному входу первого дополнительного коммутатора 14, на выходе которого подключен блок 15 памяти, выход которого подключен к другому входу первого до-, полнительного коммутатора 14 и к одному входу второго дополнительного коммутатора 16, выход которого подключен ко второму входу формирователя 17 сигнала управления, к первому входу которого подключен выход коммутатора 12. К другому входу второго дополнительного коммутатора 16 подключен задатчик 13 опорного сигнала. Управляющие входы коммутатора 12 и второго дополнительного коммутатора 16 через блок 18 задержки команды подключены к управляющему блоку 19, к которому подключены также управляющий вход привода 11 узла 6нагружения номирующей нагрузкой, управляющий вход распределителя 3 материала и управляющий вход первого дополнительного коммутатора 14. Дополнительный конвейер 20 установлен после распределителя 3материала и подает материал в выпускную воронку, общую с грузоприемным конвейером 4 (не показана). Дозатор работает следующим образом. Перед началом работы на рычаг 7 устанавливается тяга9 с грузом 10, по массе соответствующим нормированной (заданной) величине производительности дозатора. Поскольку скорость конвейерной ленты постоянна (используется синхронный привод) нагрузка на грузоприемном конвейере 4 пропорциональна производительности дозатора. После установки на тягу 9 груза 10 с блока 19 управления подается команда Контроль. При этом распределитель 3 материала устанавливается в положение подачи материала на дополнительный конвейер 20, привод II подвешивает тягу 9 с грузом 10 на грузоприемный рычаг 7, коммутатор 14 подключает выход силоизмерительного преобразователя 5 к блоку 15
памяти. Одновременно коммутаторы 12 и 16 подключают оба входа формирователя 17 сигнала управления к задатчику 13 опорного сигнала.
При пустом конвейере 4 сигнал с 5 выхода силоизмерительного преобразователя 5, пропорциональный заданной массе (и производительности) дозатора, поступает в блок 15 памяти. Блок 18 осуществляет.задержку команды при ее снятии. При снятии команды Контроль распределитель
3переключает подачу материала на грузоприемный конвейер 4, блок 15 памяти коммутатора 14 отключается 5 от силоизмерительного преобразователя 5, запоминая величину сигнала силоизмерительного преобразователя
5 при нормированной (заданной) нагрузке, привод 11 разгружает рычаг 20 7. После установленной вьщержки времени блок 18 задержки команды переключает на первый вход формирователя 17 выход силоизмерительного преобразователя 5, а на второй вход 5 подключает выход блока 15 памяти, который с помощью обратной связи через первый вход коммутатора 14 самоблокируется .по выходному сигналу .30
Под действием управлякщего сигала по второму входу от блока 15 амяти, формирователь 17 увеличивает сигнал на выходе, который приводит к повышению скорости привода 2 до 35 тех пор, пока под действием массы атериала на грузоприемном конвейере
4сигнал на выходе силоизмерительного преобразователя 5 не сравняется с сигналом, поступакйцим на фор- 40 ирователь 17 со стороны блока 15 памяти.
При длительном режиме работы дозатора характеристики конвейера 4 и рычага 7 и силоизмерительного преобразователя 5 могут измениться по различным причинам - налипание, материала на ленте, напыление, температурный дрейф и т.д. Это приводит к j искажению информации о действительном значении производительности озатора.
В установившемся режиме в результате, например, изменения массы тары грузоприемного конвейера 4, сигнал на выходе силоизмерительного преобразователя 5 хотя и будет соответствовать заданному уровню, однако составляющая его полезной нагрузки по массе транспортируемого материала будет отличной от заданного значения.
По команде Контроль с блока 19 подача материала с помощью распределителя 3 переключается на дополнительный конвейер 20. Одновременно на оба входа формирователя 7 сигнала управления подается один и тот же сигнал от задатчика I3 опорного сигнала. Равенство входных сигналов на входах формирователя I7 не приводит к изменению его выходного сигнала управления, что обеспечивает сохранение установившегося ре-жима работы питателя 1 на весь период контроля. По команде Контроль с блока 19 узел 6 нагружает нормируюцей нагрузкой силоизмерительный преобразователь 5, выходной сигнал которого, после схода остатков материала с грузоприемного конвейера 4 устанавливается пропорциональным сумме массы груза и отклонению тарной массы грузоприемного конвейера 4. Сигнал, поступающий в блок 15 памяти, изменяет ее ранее установленное значение и, после снятия команды Контроль, запоминается. Снятие команды Контроль с блока 19 приводит к переключению подачи материала на грузоприемный конвейер 4, переключению подачи материала на грузоприемный конвейер 4, переключению коммутатора 14 на самоблокировку, блока 15 памяти - на запоминание и снятию гири IО с рычага 7.
Подключение силоизмерительного пр.еобразователя 5 коммутатором 12 и выхода блока 15 коммутатором 16 к входам формирователя I7 произойдет после выдержки времени, заданной в блоке 18 задержки команды. К зтому времени материал заполнит грузоприемный конвейер 4 и сигнал на выходе силоизмерительного преобразователя 5 установится на уровне, равном или с небольшими отклонениями, от ранее установившегося значения до контроля. При рассогласовании сигналов силоизмерительного преобразователя 5 и блока 15 памяти формирователь 17 изменением сигнала управления на выходе, т.е. изменением производительности питателя компенсирует это рассогласование.
Таким образом, нестабильность метрологических характеристик ве7соизмерительного устройства доэа тора (грузоприемный конвейер 4 и силоизмерителькый преобразователь 5 может быть скомпенсировано измене нием режима работы дозатора. Использование предлагаемого устройства позволяет в режимах длитель ной непрерывной эксплуата цин дозатора при подаче пылящих ; материалов, изменении температурных режимов и прочих условий, приводяnyix к дрейфу тарной нагрузки (уход нуля) и изменению крутизны (диапазон измеряемых нагрузок) весоизмерительного устройства, обеспечить необходимую точность дозирования, не нарушая процесса подачи. Предлагаемое устройство позволяет исключить необходимость присутствия людей, обслуживающихдозатор в месте его установки, что особенно важно при дозировании вредных и токсичных материалов. Формула изобретения Весовой дозатор непрерьгоного де ствия, содержащий питатель, связан ный через распределитель материала с дополнительным конвейером и груз приемным конвейером, силоизмерител ный преобразователь которого подключен к первому входу коммутатора второй вход которого подключен к з датчику опорного сигнала, а выход к первому входу формирователя сигнала управления, выход которого соединен с приводом питателя, и блок управления, подключенный к приводу распределителя материала, отличающийся тем, что, .с целью повьшения точности дозирования при длительной работе, в него введены узел нагружения нормирующей нагрузкой с приводом, первый и второй дополнительные коммутаторы, блок памяти и блок задержки команды, причем силоизмерительный преобразователь соединен с одним входом первого дополнительного коммутатора выход которого через блок памяти связан с другим своим входом и с одним входом второго дополнительного коммутатора, другой вход которого соединен с задатчиком опорного сигнала, а выход со вторым входом формирователя сигнала управления, при этом блок управления соединен с приводом узла нагружения нормирующей нагрузкой и с управляющим входом первого дополнительного коммутатора, а управляющие входы коммутатора и второго дополнительного коммутатора связаны с блоком управления через блок задержки команды. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3850023, кл. 73-1, опублик. 1974. 2.Авторское свидетельство СССР № 712682, кл. G 01 G П/14, 1978 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор непрерывного действия | 1978 |
|
SU712682A1 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU939953A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1111034A1 |
| Весовой дозатор непрерывного действия | 1982 |
|
SU1045001A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ НЕТТО | 1990 |
|
RU2036440C1 |
| Способ весового дозирования сыпучих материалов и дозатор сыпучих материалов | 1987 |
|
SU1516792A1 |
| Весовой дозатор сыпучих материалов непрерывного действия | 1980 |
|
SU1076765A1 |
| Дозатор сыпучих материалов | 1983 |
|
SU1108335A2 |
| Весовой дозатор непрерывного действия | 1980 |
|
SU932266A1 |
| Дозатор непрерывного действия | 1978 |
|
SU771471A1 |