1
Изобретение предназначено для перемещения гибкого деформируемого материала, преимущественно бумаги, и может найти применение в бумажной, химической и металлургической промышленности.
Известен многодвигательный электропривод постоянного тока с цифровым управлением, выполненный по одно- или многопреобразовательной схеме по системе генератор - двигатель или с управляемыми тиристорными преобразователями, двигатели которого имеют цифровые измерители скорости и цифровые регуляторы скорости. Ко входу каждого из цифровых регуляторов подключены цепьобратной связи по скорости от импульсных тахогенераторов и цепь задания скорости, вводимая для двигателей, следующих за одним из крайних, от регулируемого преобразователя частоты, относящегося к данному двигателю. При этом регулируемые преобразователи частоты соединены последовательно в порядке чередования двигателей, к которым они относятся, а вход преобразователя частоты, относящегося к двигателю, следующему за указанным крайним, подключен к регулируемому генератору задающей частоты и дополнительному преобразователю задающей частоты, к которому подключен цифровой регулятор скорости крайнего двигателя, а в случае однопреобразовательной схемы и цифровой регулятор напряжения преобразователя. Регулируемые преобразователи частоты в таком электроприводе выполнены в виде двоичных управляемых делителей частоты с дробным коэффициентом деления , поэтому при последовательном соединении их не может быть обеспечена возможность задания соотнощения скоростей вращения смежных двигателей, даже равного единице, в то время ка-к с учетом кинематической цепи привода для задания требуемых по технологии соотношений линейных скоростей выходных валов должна быть обеспечена воз.можность задания соотношений скоростей вращения
смежных двигателей, больших единицы. Для расширения диапазона регулирования в последовательно соединенные регулируемые преобразователи частоты привода предварительно должна быть введена некоторая уставка,
определяемая диапазоном регулирования соотношения скоростей. Кроме того, недостатком привода является сложность настройки цифровой системы, поскольку при настройке приходится оперировать взаимосвязанными органами последовательного и параллельного управления, расположенными в разных помещениях. Настройку осуществляют по показаниям цифровых измерителей, которые, будучи подключенными к выходам импульсных тахогенераторов, не дают устойчивых показаний
из-за неизбежных колебаний скорости в замкнутой системе автоматического регулирования, что снижает ее точность. Настройка требует значительного времени и не может быть осуществлена в неподвижном состоянии привода, что приводит к сокращению рабочего времени машин. В неподвижном состоянии блоки параллельного управления, расположенные в цепях обратной связи по скорости, и вся система цифрового измерения не функционируют ввиду отсутствия сигналов с импульсных тахогенераторов.
Для упрощения и повышения надежности в работе привода, а также повышения производительности машин путем сокращения времени холостого хода за счет возможности настройки неподвижного привода в предлагаемом электроприводе в цепях обратной связи по скорости выходы импульсных тахогенераторов соединены со входами цифровых регуляторов скорости. Регулируемый генератор задающей частоты подключен к цифровому регулятору крайнего двигателя через дополнительный регулируемый преобразователь частоты. Цифровые измерители подключены к двухпозиционным переключателям, выводы первой позиции каждого из которых подключены к выходам смежных импульсных тахогенераторов, а выводы второй позиции - к выходам соответствующих смежных регулируемых преобразователей частоты, тогда как крайний цифровой измеритель подключен в первой позиции переключателя к выходу крайнего импульсного тахогенератора, а во второй позиции к выходу дополнительного регулируемого преобразователя частоты.
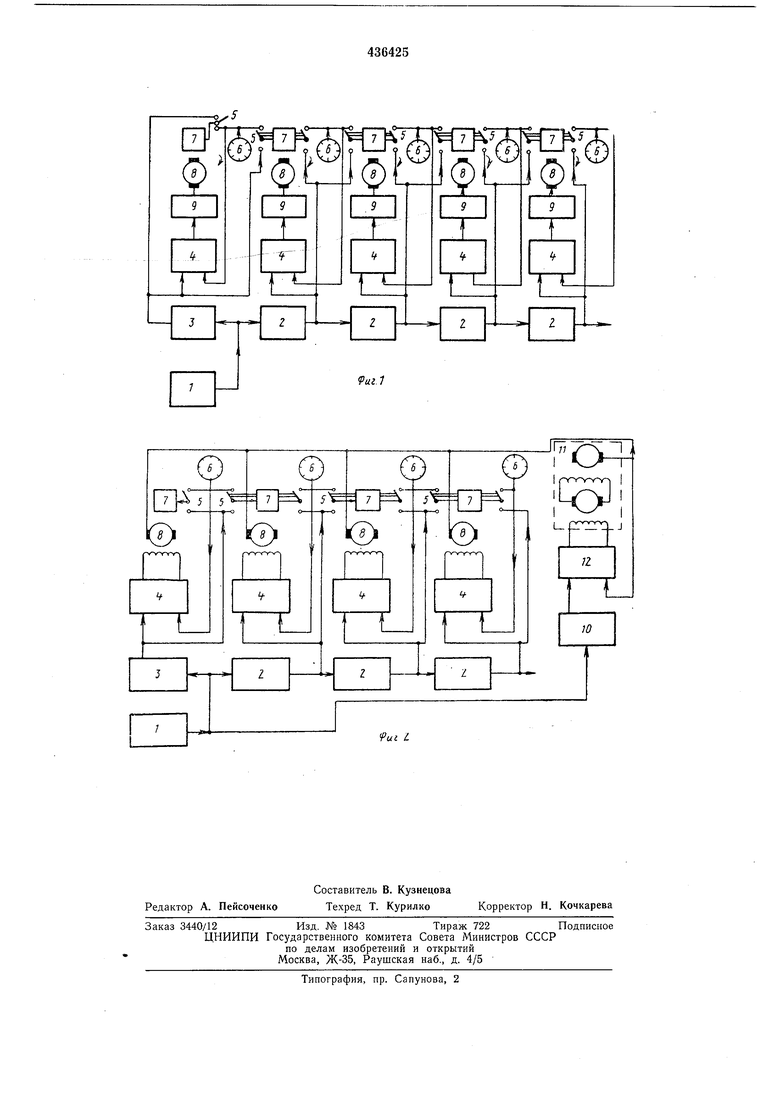
На фиг. 1 дана блок-схема описываемого электропривода, выполненного по многопреобразовательной схеме с управляемыми тиристорными преобразователями; на фиг. 2 - то же, выполненного по однопреобразовательной схеме с системой генератор-;двигатель.
К регулируемому генератору 1 задающей частоты (см. фиг. 1) подключены последовательно соединенные регулируемые преобразователи 2 частоты и дополнительный регулируемый в том же диапазоне преобразователь 3 частоты. К выходам преобразователей 2 и 3 подсоединены цифровые регуляторы 4 скорости и группа одноименных контактов двухпозиционных переключателей 5. Другая группа одноименных контактов переключателей 5 соединена с выходами импульсных тахогенераторов 6, к которым подключены также входы цифровых регуляторов 4. Средние контакты переключателей 5 соединены со входами цифровых измерителей 7 скоростей. Приводные двигатели 8 подключены к выходам управляемых тиристорных преобразователей 9, а входы последних - к выходам цифровых регуляторов 4 скорости.
В схему (см. фиг. 2) дополнительно введены преобразователь 10 частота задающего генератора - напряжение, генератор И и регулятор 12 напряжения генератора.
При, таком выполнении электропривода отпадает необходимость предварительного ввода уставок в последовательно соединенные преобразователи частоты. Требуемое соотношение скоростей устанавливают путем нажатия на кнопки «Больше и «Меньше, расположенные на пультах управления приводом в машинном зале, что упрощает настройку системы и сокращает необходимое
для этого время.
Регулируемые преобразователи в предлагаемом электроприводе выполнены так, что частоты задания на их выходах равномерны. Это снижает уровень пульсаций скорости, а
также требования в отношении частотных свойств применяемых элементов при сохранении неизменным общего объема электронного оборудования. Выходы импульсных тахогенераторов соединены со входами цифровых регуляторов при сохранении дисков тахогенераторов идентичными. При этом параллельное управление скоростью двигателей, которое требуется для настройки системы после изменений в кинематической цепи привода, например при нереточке выходных валов из-за износа, смене редуктора, двигателя, осуществляется также при помощи последовательно соединенных преобразователей частоты. Если требуется изменить только скорость данного двигателя, то после ввода новой уставки задания в данный цифровой регулятор вводят новую уставку и в последующий. Значение этой уставки определяют соотнощением
, КК
If ViVa
Л2 -
KI
ИЗ условия неизменности частоты на выходе
последующего регулируемого преобразователя частоты, где К, и /Са - исходные значения уставок; /С/ и /Са - HOiBbie значения уставок. Поскольку управление скоростями осуществляется исключительно по цепям задания, то
с учетом астатизма цифровых регуляторов скорости двигателей становится возможной настройка всего привода в неподвижном состоянии. При этом настройку производят по показаниям цифровых измерителей скоростей,
которые подключены к двухпозиционным переключателям. Выводы первой позиции каждого из переключателей подключены к сигналам смежных импульсных тахогенераторов, а выводы второй позиции - к сигналам соответствующих смежных регулируемых преобразователей частоты. Крайний цифровой измеритель, измеряющий уровень скорости, подключен в первой позиции переключателя на сигнал крайнего импульсного тахогенератора,
а во второй позиции на сигнал дополнительного регулируемого преобразователя частоты.
При переключении уставка в цифровом измерителе не требует изменения и остается прежней.
Возможность настройки неподвижного привода повышает производительность- машин за счет сокраш,ения времени холостого хода. Преимуш,еством самого процесса настройки является то, что отсутствуют колебания, вызываемые действием возмущений на объект, и удается в полной мере использовать точность цифрового метода. В случае сбоев в работе переключение позволяет быстро определить исправность преобразователей.
Регулируемый генератор задающей частоты подключен к цифровому регулятору крайнего двигателя через дополнительный регулиpyeNibui преобразователь частоты, что позволяет в случае однопреобразовательной схемы привода избежать рассогласования общего контура регулирования по напряжению якорей двигателя с контурами регулирования скорости двигателей по возбуждению из-за изменения напряжения преобразователя при изменении частоты задающего генератора, которое возникало бы при отсутствии дополнительного преобразователя в случае изменения передаточного коэффициента цепи регулятора возбуждения следующего за крайним двигателя, так как в этом случае для согласования скорости этого двигателя с крайним понадобилось бы изменить частоту задающего генератора.
Предмет изобретения
Многодвигательный электропривод постоянного тока с цифровым управлением для перемещения гибкого деформируемого материала, преимущественно бумаги, выполненный по одно- или многопреобразовательной схеме с управляемы.ми преобразователями, двигатели которого имеют цифровые измерители скорости и цифровые регуляторы скорости, на вход каждого из которых подключены цепь обратной связи по скорости от импульсных тахогенераторов и цепь задания скорости, вводимая для двигателей, следующих за одним из крайних, от регулируемого преобразователя частоты, относящегося к данному двигателю, причем регулируемые преобразователи частоты соединены последовательно в порядке чередования двигателей, к которым они относятся, а вход преобразователя частоты, относящегося к двигателю, следующему за крайним, подключен к регулируемому генератору задающей частоты и дополнительному
преобразователю задающей частоты, к которому подключен цифровой регулятор скорости крайнего двигателя, а в случае однопреобразовательной схемы и цифровой регулятор напряжения преобразователя, отличающ и и с я тем, что, с целью упрощения и повыщения надежности в работе привода, а также повышения производительности машин путем сокращения времени холостого хода за счет возможности настройки неподвижного
привода, регулируемый генератор задающей частоты подключен к цифровому регулятору крайнего двигателя через дополнительный регулируемый преобразователь частоты, причем цифровые измерители подключены к двухпозиционным переключателям, выводы первой позиции каждого из которых подключены к выходам смежных импульсных тахогенераторов, а выводы второй позиции - к выходам соответствующих смежных регулируемых
преобразователей, тогда как крайний цифровой измеритель подключен в первой позиции переключателя к выходу крайнего импульсного тахогенератора, а во второй позиции к выходу дополнительного регулируемого нреобразователя частоты.
Риг.1
1д
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1979 |
|
SU773885A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Цифровая система для регулирования скорости электродвигателя | 1980 |
|
SU997217A1 |
| Устройство для релейного регулирования тока электродвигателя с постоянной частотой переключений | 1982 |
|
SU1120472A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Асинхронный частотно-регулируемыйэлЕКТРОпРиВОд | 1979 |
|
SU799094A1 |
| Цифровая система регулирования соотношения скоростей многодвигательного электропривода | 1980 |
|
SU944045A1 |
| Устройство для регулирования числа оборотов асинхронного двигателя | 1977 |
|
SU871746A3 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1972 |
|
SU1840123A1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |