ма, управляющую микроЭВМ 16, узел 17 сопряжения с объектом управления, параллельный интерфейс 18, вход 19 пре- рьгаания управляющей микроЭВМ, узел 20 задания минимального значения диаметра кабеля, узел 21 задания режима параметров механизмов, измеритель 22 скорости толкающего механизма, информационные входы 23-28 узла 17, аналоговые выходы 29 и ЗО узла 17, входы 31 и 32 коррекции частоты электропри1
Изобретение относится к автоматике и вычислительной технике и может быть использовано при автоматизации производства кабелей в виде проводов с изолирующим покрытием.
Цель изобретения - повышение точности стабилизации.
Сущность изобретения состоит в создании дополнительного контура регулирования по отклонению диаметра изоляции кабеля, статистической обработке результатов измерений, величин отклонений диаметров пластичной и отвердевшей изоляции и использовании статистических данных при регулировании параметров процесса нанесения изоляции.
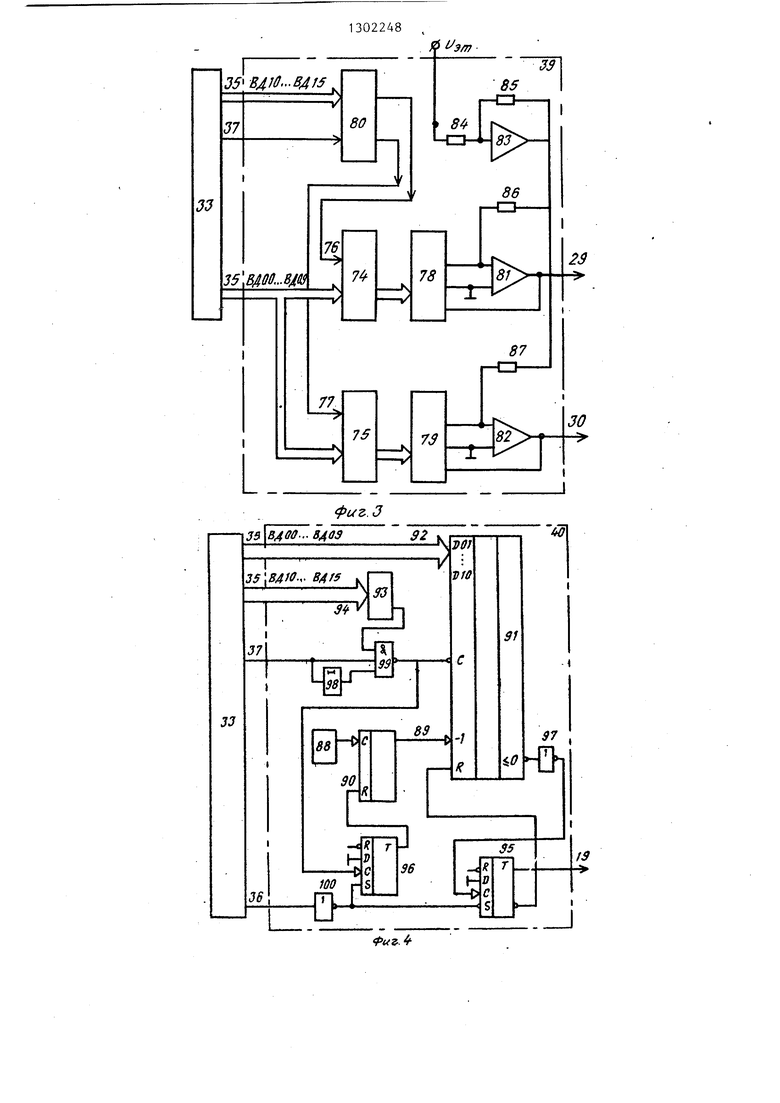
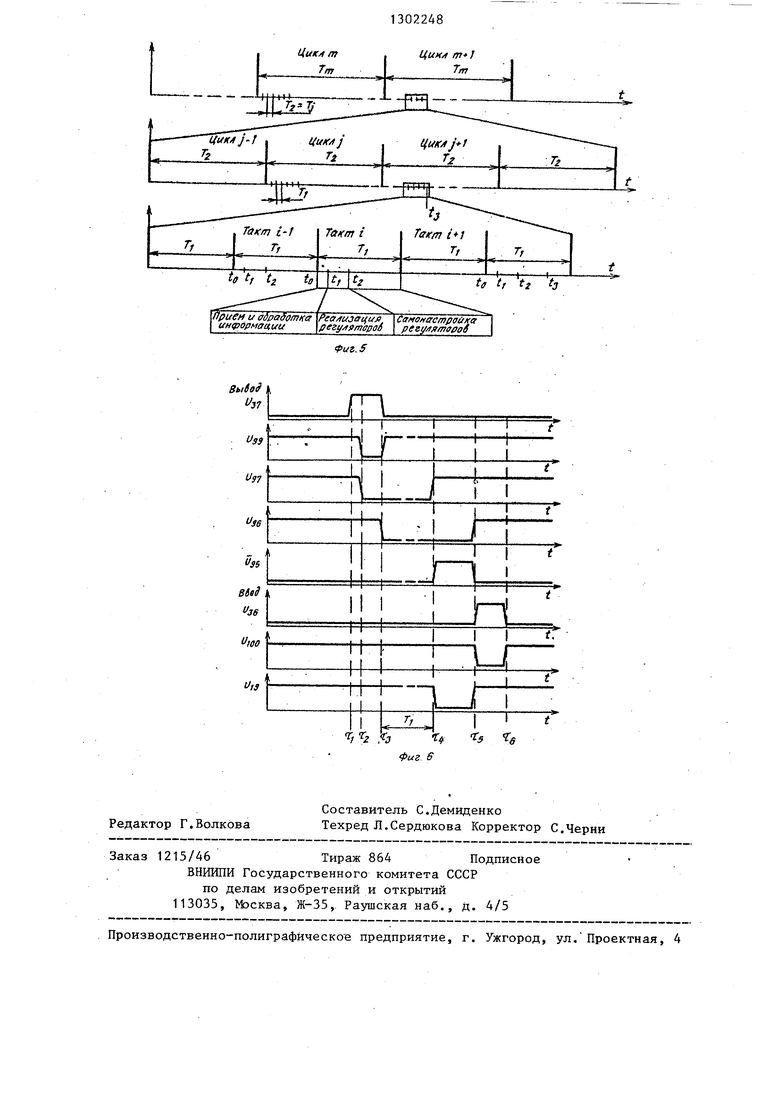
На фиг.1 представлена функциональная схема кабельного агрегата с системой автоматического управления электроприводами механизмов на основе управляющей микроэвм; на фиг.2 - структурная схема узла сопряжения управляющей микроЭВМ с кабельным агрегатом; на фиг.З - структурная схема блока вывода аналоговой информации; на фиг.4 - схема программируемого таймера;: на фиг.З - диаграмма циклов работы устройства; на фиг.6 - временные диаграммы, поясняющие работу программируемого таймера.
На фиг. 1-4 обозначены: отдающий барабан 1, толкающий механизм 2, эк- струдер 3, первый измеритель 4 диаметра кабеля, охлаждающая ванна 5, второй измеритель 6 диаметра кабеля, тянущий механизм 7, приемный барабан 8, электропривод 9 толкающего механизма, электропривод 10 экструдера,
водов толкающего и экструзионного механизмов. Сущность изобретения состоит в создании дополнительного контура регулирования по отклонению диаметра кабеля, статистической обработке результатов измерений величин отклонений диаметров после экструдера и после зоны охлаждения и использовании статистических данных при регулировании параметров процесса нанесения изоляции. 2с. и 3 з.п. ф-лы, 6 ил.
0
S
0
5
0
5
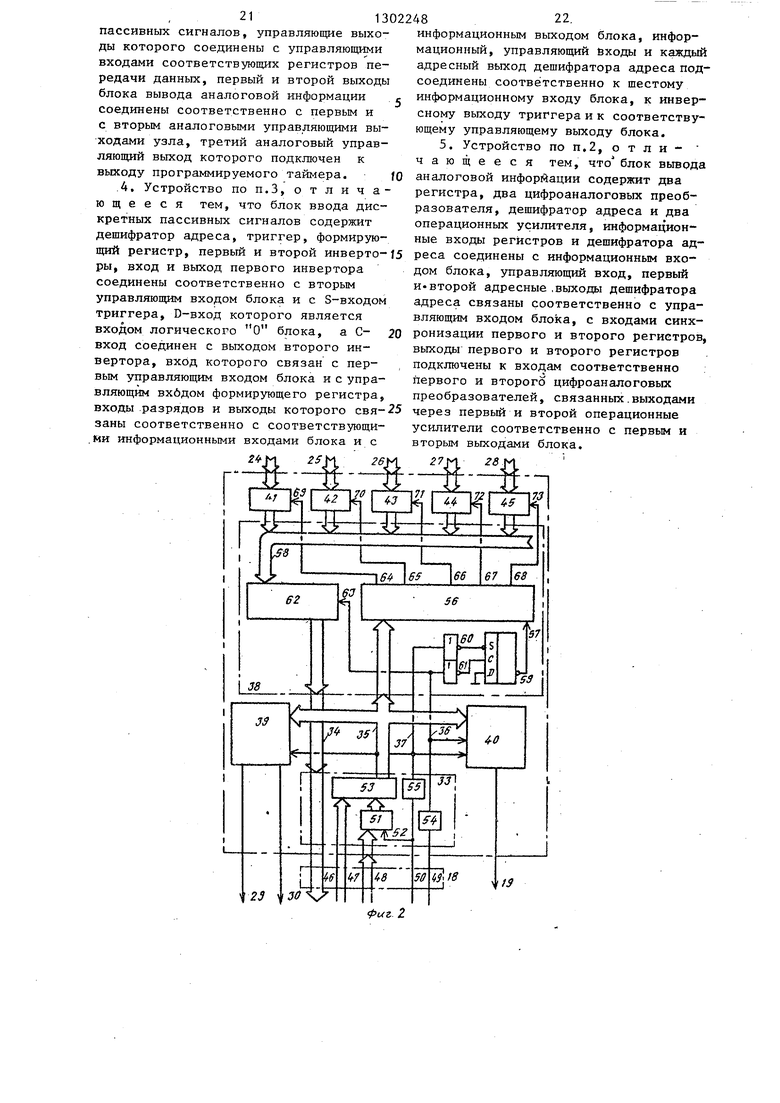
электропривод 11 тянущего механизма, вход 12 задания частоты вращения электропривода толкающего механизма, вход 13 задания частоты вращения электропривода экструдера, вход 14 задания частоты вращения электропривода тянущего механизма, вход 15 коррекции тока электропривода тянущего механизма, управляющая микроЭВМ 16, узел 17 сопряжения с объектом управления, интерфейс 18, вход 19 прерывания управляющей микроЭВМ, узел 20 задания минимального значения диаметра кабеля, узел 21 задания режима и . параметров механизмов, измеритель 22 скорости вращения электродвигателя толкающего механизма, аналоговый выход 23 узла задания минимального диаметра кабеля, выход 24 первого измерителя диаметра кабеля, выход 25 второго измерителя диаметра кабеля, задающий выход 26 узла задания минимального диаметра кабеля, задающий выход 27 узла задания режима и пара- метров механизмов, информационный вы- выход 28 измерителя скорости вращения электродвигателя толкающего механизма, первый 29 и второй 30 аналоговые управляющие выхрды узла сопряжения, входы 31 и 32 коррекции частоты вращения электроприводов толкающего и экструзионного механизмов, блок 33 контроля информационных и управляющих сигналов, информационный выход 34 узла сопряжения, информационный выход 35 блока контроля, первый 36 и второй 37 управляющие выходы блока контроля. Узел 17 сопряжения с объектом управления содержит блок 38 ввода дискретных пассивных сигналов, блок 39 вывода аналоговой информации, программи- руемый таймер 40, регистры 41-45 передачи данных узла 17, кодовый выход 46, шестой 47 и седьмой 48 инфор- мационные входы узла 17, первый 49 и второй 50 управляющие входы узла 17. Блок 33 контроля информационных и управляющих сигналов содержит триг- герный регистр 51, вход 52 синхрони- зации регистра 51, инверторно-усили- тельный регистр 53 усилителей-формирователей 54 и 55. Блок 38 ввода дискретных пассивных сигналов содержит дешифратор 56 адреса, вход 57 управления дешифратора адреса, входы 58 разрядов формирующего регистра, триггер 59, инверторы 60 и.61, формирующий регистр 62, вход 63 управления формирующего регистра, выходы 64-68 дешифратора адреса, входы 69-73 управления регистрами передачи данных.
Блок 39 вывода аналоговой информации содержит триггерные регистры 74 и 75, входы 76 и 77 синхронизации триггерных регистров, цифроаналоговые преобразователи 78 и 79, дешифратор
80адреса, операционные усилители
81- 83, резисторы 84-87. Прогрйммируемый таймер 40 содержит
задающий генератор 88 прямоугольных импульсов, управляемый делитель 89 частоты импульсов, вход 90 начальной установки делителя 89, счетчик 91, канал 92 вывода кода временного ин- тервала, дешифратор 93 адреса, канал 94 вьтода адреса программируемого таймера, триггер 95 прерывания, триггер 96 запуска счета, инвертор 97, элемент 98 задержки, элемент И-НБ 99 и инвертор 100.
На фиг.1 также обозначены: двигатели 101, тахогенераторы 102, элементы 103 нагрузки, датчики 104 тока, тиристорные преобразователи 105, им- пульсные формирователи 106, регуляторы 107 тока, регуляторы 108 скорости сумматоры 109 и 110, задатчик 111 тока, источник 112 и приемник 1-13 света
Сигналы напряжения на выходах ло- гических элементов ячейки программируемого таймера (фиг.6):
и - сигнал Вывод - сигнал синх- ронизации вьгоода кода из ЭВМ;
П„ - сигнал Ввод - сигнал синх- ронизации ввода данных;
и - напряжение на инверсном выходе триггера 95;
и - .напряжение на инверсном выходе триггера 96;
Uq - выходной сигнал инвертора 97
Ugg - выходной сигнал элемента 99;
- выходной сигнал инвертора 100
- сигнал прерывания на выходе ячейки таймера 40;
t, - момент прихода сигнала Вывод ;
1 - момент записи кода временного интервала Т., в счетчик;
LJ - момент запуска счета;
Т - момент окончания отсчета временного интервала LS момент принятия таймером 40 исходного состояния.
Система автоматического управления и регулирования каждого электропривода содержит аналоговую и цифровую части.
Аналоговая часть имеет в своем составе регулятор частоты вращения, регулятор тока и узел импульсно-фазово- го управления тиристорами. Установка заданного режима работы электроприводов толкающего 2, экструзионного 3 и тянущего 7 механизмов осуществляется путем подачи определенных значений аналоговых сигналов напряжения на входы 12 - 14 соответственно. Тянущий механизм 7 работает в режиме постоянного натяжения кабеля, что достигается работой его электропривода 11 в режиме поддержания неизменного тока якоря двигателя, устанавливаемого сигналом напряжения по входу 15.
Цифровая часть устройства управления электроприводами кабельного агрегата содержит оптический 4 и микрометрический 6 цифровые измерители диаметра, управляющую микроЭВМ 16, узел 17 сопряжения микроЭВМ с объектом управления, интерфейс 18 (канал связи) между управляющей ЭВМ и узлом сопряжения, вход 19 прерывания, узла задания режима 21 и минимального значения диаметра кабеля 20 и цифровой измеритель 22 скорости толкающего механизма.
Для повьшгения надежности функционирования экструзионного кабельного агрегата регулирование производится в отклонениях от среднего значения диаметра. Это означает, что при отключениях системы регулирования кабельный агрегат продолжает работать нормально, но без цифровой коррекции, так как частоты вращения электроприводов толкающего и экструзионно- го механизмов по входам 12 и 13 остаются установленными в соответствии с технологической картой на данный типоразмер кабеля. Однако флуктуации толщины изоляции при этом возрастут. Время транспортного запаздьшания
- . вычисляется по формуле
1л.
(1)
гап.( и,
где 1 - расстояние от дорна экстру- дера до оптического датчика; и. - скорость движения кабеля, определяемая по скорости электропривода толкающего ме- ханизма.
После набора массива измеренных значений диаметра D,- из N значений вычисляют первую дисперсию диаметра j как разность между средним квадратом Dep.Kt.j результатов измерения диаметра D. и квадратом среднего арифметического (n.j ) этих же измерений
6,Dep.K6.i-(DcP,j)S
(2)
D,p.. .i 11(0,3 ); 1
D.p.i .
(3)
(4)
-
где DJJ - i-e текущее значение измеряемой величины диаметра, соответствующее j-й выборке, ,2,3,...,N . ,1,2,3,...,L.
Подсчитьшают статическую ошибку S как разность между фактическим средним значением диаметра П данием предыдущего шага Dj.
-Dj«JJ- (5)
На начальном шаге самонастройки для принимается равной нулю.
Полученное значение дисперсии ff- используется для вычисления слагаемого уставки &Dj среднего диаметра изоляции по заданной вероятности f невыхода за пределы меньше минир ального значения диаметра Эта вероятность равна функции Лапласа
f (Ц.р +uDj )Ф() (6) . .Уё/ -/2
По заданной величине ,99 с помощью обр,атной интерполяции по формуле Лагранжа вычисляется аргумент функции (6)
но- тасит. я
1) fO
f5
у- ка; ме-
а раифе25
.83
Га/
откуда
&DJ /2-X-v5 H-JG 2,588v/6;j .(7)
Так как Н и f связаны между собой однозначно, вместо f задается Н в виде константы.
Затем вычисляется параметр ol-j первой корреляционной функции значений диаметров К(),2. (i .
Расчет величины cij производится следующим образом: рассчитываются три значения корреляционной функции (0), р (10), Р (20); осуществляется центрирование этих значений; выполняется аппроксимация корреляционной функции экспонентной и вычисляются три значе-, ния коэффициента у показателя степени этой экспоненты; производится усреднение вычислительных значений d-j ,
Вычисление ординат корреляционной функции осуществляется по формуле N-M
(8)
1
j(
i-1
30
Затем путем вычитания из полученных значений квадрата среднего значения диаметра ( )2 находятся центрированные значения корреляционной функ- ции RO, Ri, RZ
(0) - (Dcpj) (10) - (D,p, )2 (20) - (D,,; )
cpj
(9)
Далее производится аппроксимация центрированной корреляционной функции экспонентой
Rj(MT)Rj (10) Для вычисления коэффициента используются следующие соотношения: R. R. ;
«Ct t)
R. .R. ,
J3
ji
где t, и tj - интервалы времени, соответствующие и М,.,20, t М Т
и , Т,;
(12)
d- di. расчетные значения кoэффициeнтacl)-J .
Путем логарифмирования выражений (11) определяются величины
55
)
(13)
с,з().
71302248
Суммируя и усредняя, получаем исомое значение параматра
н с т н н п н к
)3
(14)
По найденным величинам и otj определяют параметры первого, регулятора диаметра кабеля G и, Fj
a(.--Vn) -T,
G. (IS) . - .1 V 1Vni CCotj , )
-d
F. 1 , 0(16)
jar, i C(cLj - j )
где a ,b,c,d величины, зависящие от параметров электроприводов экструзи- онного и толкающего механизмов.
Далее по заданному с помощью программных переключателей минимально I допустимому значению диаметра кабеля йин коэффициенту усадки QJ, статической ошибке Sj, выходному сигналу второго регулятора диаметра кабеля Y. , дисперсии 6. и заданнойу коэффициенту Н вероятности попадания диПрерывания по таймеру и реализация функций регуляторов диаметра выполняются в каждом i-M такте управления, а самонастройка, т.е. расчет коэффициентов регулятора GJ и Fj , выполняется после набора массива из N значений диаметра D,- . Она осуществляется в течение нескольких тактов управления (фиг.5) и занимает в каждом i-м такте интервал времени от момента t30
аметра D,- за пределы меньше D вырабатывают задание первому регулятору диаметра кабеля по соотношению . В,,,,,, D,-Q.-Sj -HY. -bHv/ёр . (17) Коэффициент усадки изоляции кабеля равен отношению среднего значения ди-35 ДО момента t следующего (i+1)-ro аметра кабеля измеренного оптическим такта. После окончания вычисления зна- измерителем 0,.. к среднему значению диаметра, измеренному микрометрическим измерителем .,,,.:
Qj
.
Процедура определения выходного сигнала второго регулятора диаметра кабеля Y описана ниже.
Вычисленное в (17) значение задания первому регулятору диаметра кабеля D j, сравнивают с текущим значением диаметра DJ, получая входной сигнал первого регулятора„
чений GJ и FJ в момент времени t. (5-й такт, фиг.5) осуществляется смена старых значений G- и F. на
40 .новые вновь рассчитанные.
(18) Последние не изменяются на протяжении последующих N i-x тактов управления ,
Одновременно через вторичные про- 45 межутки времени Т , больше в N раз
j.j.-, J aadi-n tj+
(19)
по которому формируют управляющее воз- действ йе по отклонению для электро- приво дов экструзионного и толкающего механизмов в соответствии с соотноше-ее
первичных Т J, измеряют вторым измерителем значения диаметра кабеля Dj после прохождения из зоны охлаждения -И время транспортного запаздывания -jun.j экструдера до второго микрометрического измерителя.
Время транспортного запаздывания
вычисляется по формуле
- --(71
Ljanj у.l.-i I ;
нием
X.j,,+F.-Y,.,,, . (20) Это управляющее воздействие преобY. . G i,j + i
разует в аналоговый сигнал напряже8
O
ния, который затем подают на входы 31 и 32 коррекции частоты вращения соответственно электроприводов 9 и 10 толкающего 2 и экструзионного 3 механизмов на каждом i-м такте управления. Параметры Gj и F вычисляют один раз в течение цикла j самонастройки первого контура регулирования и изменяют после очередного i-ro такта, в котором закончилось их вычисление.
Каждый i-й такт управления содержит три интервала (фиг.5):
интервал t, -t , в котором выполняется прием прерывания, переход на под- 5 программу обслуживания прерывания, считывание и анализ системной информации, прием технологической информации;
интервал , в котором выполня- 0 сатся реализация функций первого и второго регуляторов диаметра кабеля и осздцёствляется выход из прерьгаания;
интервал t -t , используемый подпрограммами самонастройки.
Прерывания по таймеру и реализация функций регуляторов диаметра выполняются в каждом i-M такте управления, а самонастройка, т.е. расчет коэффициентов регулятора GJ и Fj , выполняется после набора массива из N значений диаметра D,- . Она осуществляется в течение нескольких тактов управления (фиг.5) и занимает в каждом i-м такте интервал времени от момента t5
0
5 ДО момента t следующего (i+1)-ro такта. После окончания вычисления зна-
первичных Т J, измеряют вторым измерителем значения диаметра кабеля Dj после прохождения из зоны охлаждения -И время транспортного запаздывания -jun.j экструдера до второго микрометрического измерителя.
Время транспортного запаздывания
вычисляется по формуле
- --(71
Ljanj у.l.-i I ;
J
1 - расстояние от дорна экструдера до микрометрического датчика;
9.. 130
U;, - скорость движения кабеля, определяемая по скорости электропривода толкающего механизма.
По предварительно выполненной дис- кретной выборке значений диаметра D- от второго измерителя вычисляют вто
дисперсию диаметра б ь:
.K8.r. -(D
как разD,
cp.m
Р кВ.т средний квадрат
(22) результатов измерений диаметра:
D
cpKB.m
rDD- ) (23)
L JfTi
j-1
).- квадрат среднего арифметического этих же измерений:
L
(Ц
tPlT.
D
D
(24)
j-1
RJM)-I-I:D,-D.
Д
-cp.m L
По ЭТОЙ же выборке вычисляют параметр второй корреляционной функции диаметра R(M) и вторую дисперсию (р
Ординаты второй корреляционной функции равны
L-M D.-D. . (25)
-I J-ГЛ
j 1
Путем вычитания из полученных значений квадрата среднего значения ди- аметра (Dop.m находят центрированные значения корреляционной функции
(0) - (D.p.)
R.,Rjio) - (DCP..) . (26)
R,RJ20) - (D,,)2
Затем осуществляют выпрямление и последующую аппроксимацию корреляционной функции R экспонентой. Вычисляются три значения величиныoi :
. . 1
1 М- Т,
-(In
R,);
1
ту
М Ч
1
(27)
., D 1 гл TJ
т/ -1
После суммирования и усреднения получают искомое значение параметра :
п- (г
,,+
(28)
По найденным величинам определяют параметр второго регулято
оа диаметра G, а(о1.
и Р„
.. -jV.
ja 1
С(г
janj .
Т .
(29)
10
Js,
C(,r
1 О
JOhJ
(30)
Затем вычисляют статическую ошибку S как разность между фактическим средним значением диаметра D. и заданием предыдущего шага . S.D, -D,
... tp.m (31)
Далее по заданному с помощью программных переключателей минимально допустимому значению диаметра кабеля
5
0
5
5
0
МнН
статической ошибке S, дисперD
сии б Д и заданному коэффициенту Н вероятности попадания диаметра DJ за пределы меньше определяют задание второму регулятору диаметра по соотношению
D
ЗаЭ. m +1
D.
-5+uiffJ .
мин m - m -J)
Это задание сравнивают с текущим значением диаметра Dj,, получая входной сигнал второго регулятора:
J,trn-1 b°.3 + l -1+1 (33)
,пЬ которому формируют выходной сигнал второго регулятора диаметра кабеля в соответствии с соотношением
Yi,4,,, +F-Vi -. (
Цифровое значение сигнала Yj используют при вычислении задания первому регулятору диаметра кабеля по соотношению 17, где оно является одним из слагаемых.
Параметры G и F вычисляют после набора массива из значений диаметра D,j только один раз за m цикл, т.е. цикл самонастройки второго контура регулирования и изменяют их после очередного i-ro такта, в котором окончилось их вычисление. После этого параметры G и F не изменяются на протяжении последующих L j-x циклов.
Устройство работает следующим образом.
Через заданные промежутки времени Т таймер 40 на входе 19 вырабатывает перепад напряжения с высокого на низкий уровень, который вызывает прерывание работы процессора. После приема прерывания в момент t, (фиг.5) процессор в соответствии с программой Q работы переходит на подпрограмму обслуживания прерывания, в начале которой выполняет сброс таймера. В результате сброса таймера на входе 9 вновь появляется высокий уровень напряжения, т.е. таймер подготавливается к новому циклу работы.
Затем процессор с выхода узла 21 код режима работы кабельного агрегата и анализирует его. Если оператором
5
установлен автоматический режим работы с выдачей управляющих воздействий то процессор вновь запускает программируемый таймер 40 с интервалом Т и считывает остальные параметры сие- темной информации,
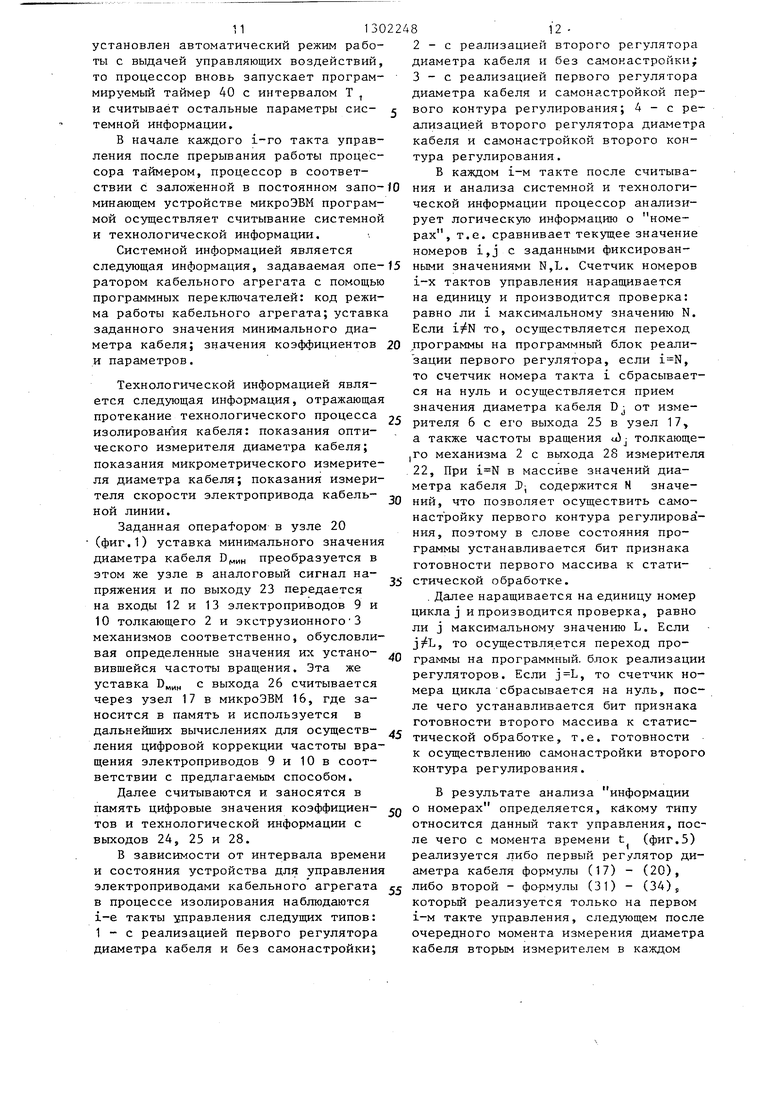
В начале каждого i-ro такта управления после прерывания работы процессора таймером, процессор в соответствии с заложенной в постоянном запоминающем устройстве микроЭВМ программой осуществляет считывание системной и технологической информации.
Системной информацией является следующая информация, задаваемая oneратором кабельного агрегата с помощью программных переключателей: код режима работы кабельного агрегата; уставк заданного значения минимального диаметра кабеля; значения коэффициентов и параметров.
Технологической информацией является следующая информация, отражающая протекание технологического процесса изолирования кабеля: показания оптического измерителя диаметра кабеля; показания микрометрического измерителя диаметра кабеля; показания измерителя скорости электропривода кабель- ной линии.
Заданная оператором в узле 20 (фиг.1) уставка минимального значения диаметра кабеля преобразуется в этом же узле в аналоговый сигнал напряжения и по выходу 23 передается на входы 12 и 13 электроприводов 9 и 10 толкающего 2 и экструзионного 3 механизмов соответственно, обусловливая определенные значения их устано- вившейся частоты вращения. Эта же уставка В„,„ с выхода 26 считывается через узел 17 в микроЭВМ 16, где заносится в память и используется в дальнейших вычислениях для осуществ- ления цифровой коррекции частоты вращения электроприводов 9 и 10 в соответствии с предлагаемым способом.
Далее считываются и заносятся в память цифровые значения коэффициен- тов и технологической информации с выходов 24, 25 и 28.
В зависимости от интервала времени и состояния устройства для управления электроприводами кабельного агрегата в процессе изолирования наблюдаются i-e такты управления следущих типов: 1-е реализацией первого регулятора диаметра кабеля и без самонастройки;
5
5 п
д
Q
5
2-е реализацией второго регулятора диаметра кабеля и без самонастройки; 3-е реализацией первого регулятора диаметра кабеля и самонастройкой первого контура регулирования; 4 - с реализацией второго регулятора диаметра кабеля и самонастройкой второго контура регулирования.
В каждом i-M такте после считывания и анализа еиетемной и технологической информации процессор анализирует логическую информацию о номерах, т.е. сравнивает текущее значение номеров i,j с заданными фиксированными значениями N,L. Счетчик номеров i-x тактов управления наращивается на единицу и производится проверка: равно ли i максимальному значению N. Если то, осуществляется переход программы на программный блок реализации первого регулятора, если , то счетчик номера такта i сбрасывается на нуль и осуществляется прием значения диаметра кабеля DJ от измерителя 6 с его выхода 25 в узел 17, а также частоты вращения oij толкающе- |Го механизма 2 с выхода 28 измерителя 22, При в массиве значений диаметра кабеля 3); содержится N значений, что позволяет осуществить самонастройку первого контура регулирования, поэтому в слове состояния программы устанавливается бит признака готовности первого массива к статистической обработке.
. Далее наращивается на единицу номер циклам и производится проверка, равно ли j максимальному значению L. Если , то осуществляется переход программы на программный, блок реализации регуляторов. Если , то счетчик номера цикла сбрасывается на нуль, после чего устанавливается бит признака готовности второго массива к статистической обработке, т.е. готовности к осуществлению самонастройки второго контура регулирования.
В результате анализа информации о номерах определяется, какому типу относится данный такт управления, после чего с момента времени t (фиг.5) реализуется либо первый регулятор диаметра кабеля формулы (17) - (20), либо второй - формулы (31) - (34)5 который реализуется только на первом i-M такте управления, следующем после очередного момента измерения диаметра кабеля вторым измерителем в каждом
После этого в моt (фиг.5) подпрограмма
текущем J-M цикле, мент времени
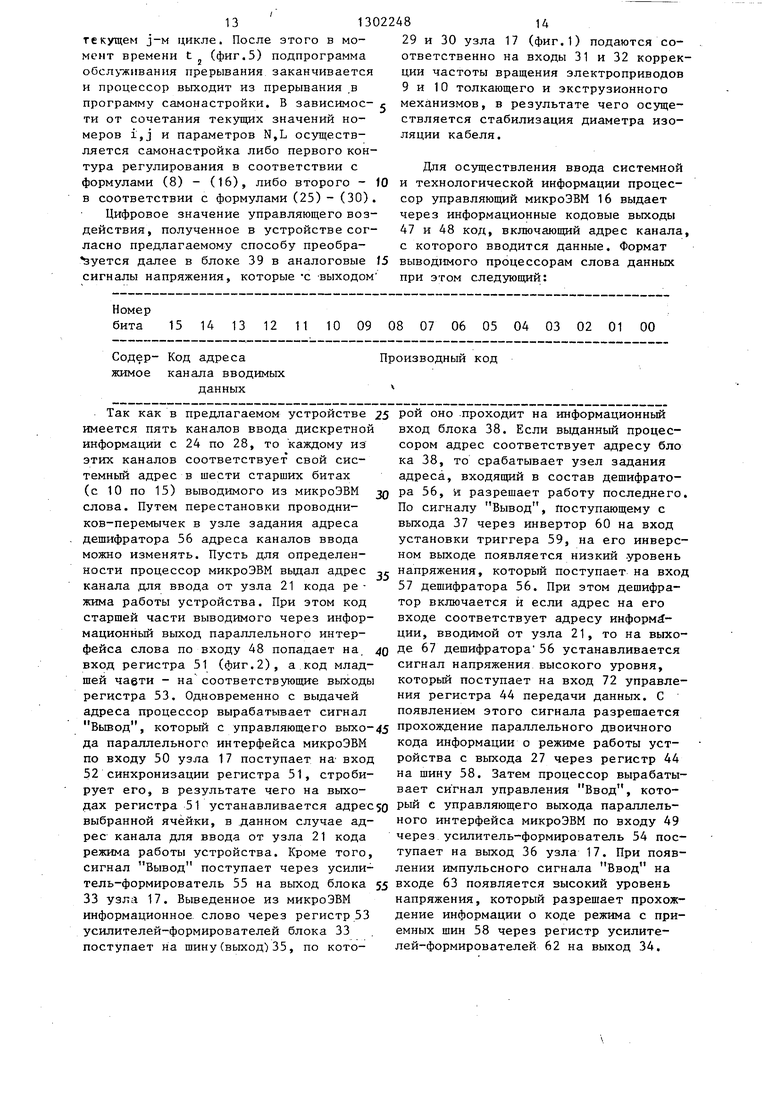
обсл -живания прерывания заканчивается и процессор выходит из прерывания .в программу самонастройки. В зависимое- ти от сочетания текущих значений номеров i,j и параметров N,L осуществляется самонастройка либо первого контура регулирования в соответствии с формулами (8) - (16), либо второго - 10 в соответствии с формулами (25) - (30). Цифровое значение управляющего воздействия, полученное в устройстве согласно предлагаемому способу преобра- зуется далее в блоке 39 в аналоговые J5 сигналы напряжения, которые -с -выходом
Номер
бита 15 14 13 12 11 10 09 08 07 06 05 04 03 02 01 00
Содер- Код адреса жимое канала вводимых данных
Так как в предлагаемом устройстве имеется пять каналов ввода дискретной информации с 24 по 28, то каждому из этих каналов соответствует свой системный адрес в шести старших битах (с 10 по 15) выводимого из микроэвм слова. Путем перестановки проводников-перемычек в узле задания адреса дешифратора 56 адреса каналов ввода можно изменять. Пусть для определенности процессор микроэвм вьщал адрес канала для ввода от узла 21 кода ре - жима работы устройства. При этом код старшей части выводимого через информационный выход параллельного интерфейса слова по входу 48 попадает на, вход регистра 51 (фиг.2), а код младшей чаети - на соответствующие выходы регистра 53. Одновременно с выдачей адреса процессор вырабатывает сигнал Вывод, который с управляющего выхода параллельного интерфейса микроЭВМ по входу 50 узла 17 поступает на- вход 52 синхронизации регистра 51, строби- рует его, в результате чего на выходах регистра 51 устанавливается адрес выбранной ячейки, в данном случае адрес канала для ввода от узла 21 кода режима работы устройства. Кроме того сигнал Вывод поступает через усилитель-формирователь 55 на выход блока 33 узла 17. Выведенное из микроЭВМ информационное слово через регистр 53 усилителей-формирователей блока 33 поступает на шину(выход)35, по кото29 и 30 узла 17 (фиг.1) подаются соответственно на входы 31 и 32 коррекции частоты вращения электроприводов 9 и 10 толкающего и экструзионного механизмов, в результате чего осуществляется стабилизация диаметра изоляции кабеля.
Для осуществления ввода системной и технологической информации процессор управляющий микроэвм 16 выдает через информационные кодовые выходы 47 и 48 код, включающий адрес канала с которого вводится данные. Формат выводимого процессорам слова данных при этом следующий:
Производный код
рой оно проходит на информационньй вход блока 38. Если вьщанный процессором адрес соответствует адресу бло ка 38, то срабатывает узел задания адреса, входящий в состав дешифратора 56, я разрешает работу последнего По сигналу Вывод, Поступающему с выхода 37 через инвертор 60 на вход установки триггера 59, на его инверсном выходе появляется низкий уровень напряжения, который поступает на вход 57 дешифратора 56. При этом дешифратор включается и если адрес на его входе соответствует адресу информй- ции, вводимой от узла 21, то на выходе 67 дешифратора 56 устанавливается сигнал напряжения высокого уровня, который поступает на вход 72 управления регистра 44 передачи данных. С появлением этого сигнала разрешается прохождение параллельного двоичного кода информации о режиме работы устройства с выхода 27 через регистр 44 на шину 58. Затем процессор вырабатывает сигнал управления Ввод, который с управляющего выхода параллельного интерфейса микроЭВМ по входу 49 через усилитель-формирователь 54 поступает на выход 36 узла 17. При появлении импульсного сигнала Ввод на входе 63 появляется высокий уровень напряжения, который разрешает прохождение информации о коде режима с приемных шин 58 через регистр усилителей-формирователей 62 на выход 34.
По этому же сигналу Ввод процессор управляющей микроЭВМ 16 принимает через блок 33 и выход 46, код информации о заданном режиме работы устройства. Одновременно сигнал Ввод , поступающий с магистральной шины 36 управления Ввод через инвертор 61 на синхронизирующий вход триггера 59, сбрасывает этот триггер, запрещая тем самым работу дешифратора 56 и выдачу |0 сигналов на выходы 64 - 68, разрешающих по входам 69-73 прохождение дискретной информации через регистры 41 - 45, поступающей на выходы 24-28.
При этом код старшей части выводимого через информационный выход параллельного интерфейса и контролер слова (ВД 10... БД 15) по щине 35 попадает на вход дешифратора 80 (фиг.З) а код младшей части (ВДОО-ВД09) - на соответствующие входы 74 и 75 узлов. Одновременно с вьщачей адреса процессор вырабатывает сигнал Вывод, который поступает на выход 37, а с нею на вход синхронизации регистра 80 и стробирует его.
Аналогично-вышеописанному только с другими адресом работает и второй канал блока 39. «
В процессе работы устройства для стабилизации диаметра кабеля програм- ;ма работает циклически с периодом дискретности Т, зависящим от настройки таймера 40. Величина периода дискретности определяется заранее, вводится в программу, и может корректироваться в зависимости от хода процесса изолирования кабеля.
Алгоритм функционирования таймера 40 поясняется временными диаграммами .приведенньми на фиг.6. Для формирования некоторого временного интервала, соответствующего периоду Т, следования i-x тактов управления, необходимо, чтобы микропроцессор выдал адрес таймера 40 по каналу 94 код формируемого временного интервала по каналу 92 и импульсный сигнал Вывод на выход 37.
При поступлении в момент времени t присвоенного программируемому тайПолученные в результате вычислений с помощью микроэвм согласно предлагаемому способу цифровые значения управляющего воздействия преобразуются на каждом такте управления в аналоговые сигналы напряжения. Для осуществления этого преобразования процессор микроэвм 16 вьщает адрес блока 39, включающий в себя адрес канала вьшода аналоговой информации и приформиро- ванный к нему двоичный код расчетного управляющего воздействия. Формат выводимого процессором слова данных при этом следующий:
5
д
0
меру адреса на выходе дешифратора 93 появляется сигнал логической 1, который разрешает прохождение импульсного сигнала Вывод через элемент 99, Запись кода заданного интервала времени, выставленного на линиях канала 92 в счетчик 91, осуществляется передним отрицательным фронтом сигнала, вырабатываемым на выходе элемента 99 в момент 1 . При этом на выходе заема (0) счетчика 91 появляется сигнал логической 1, показывающий, что в
счетчик записан ненулевой код.
На выходе инвертора 97 соответственно появится сигнал логического О.
Элемент 98 задержки необходим для того, чтобы задержать до момента времени T,j запись кода в счетчик 91 относительно переднего фронта сигнала Вывод, появляющегося в момент, и дать таким образом закончиться переходным процессам в интерфейсе 18. Задним положительным фронтом импульса, вырабатываемого в момент tj на выходе элемента 99, осуществляется установка в О триггера 96. Сигнал логического О с прямого выхода последнего поступает на вход начальной установки 90 делителя 89 частоты, разрешая работу последнего.
Начиная с момента ,т5ремени Cj на вход обратного счета счетчика 98 начинают поступать тдктовые импульсы с делителя 89, вследствие чего:изпервоначально установленного содержимого счетчика начинают последовательно вычитаться единицы. После прохождения числа импульсов, равного первоначально записанному числу, счетчик 91 устанавливается в состояние нулевого кода (момент времени В этот мо- , мент на выходе сигнала заема ( б 0) счетчика 91 появляется отрицательный перепад напряжения, вызывающий поло- жительньй перепад на выходе инвертора 97, который устанавливает в О JQ триггер 95. На инверсном выходе триггера появляется сигнал логической 1, .который поступает на вход начальной установки счетчика 91, чем запре- 1ца8т дальнейший счет импульсов. Одно-J5 отклонению диаметра изолированного
тического значения наружного диамет изолированного кабеля после зоны ох лаждения от эталонного, пропорционально изменяя давление в экструдер и скорость подачи изолируемого каб ля, отличающийся тем, что, с целью повьщ1ения точности ста билизации, разбивают во времени ве процесс стабилизации на последовательные i-e такты, каждые N из кот рых составляют j-й цикл стабилизаци группируют каждые L j-x циклов в ответствующий га-й цикл стабилизации формируют управляющее воздействие п
времеун.о сигнал логического 0 с прямого выхода триггера 95 поступает на выход таймера 40, т.е. на вход 19 прерывания. .
Микропроцессор, получив .сигнал -20 прерьгоания и обработав его, выдает в момент tj на выход 36 ответный сигнал Ввод, который, пройдя через инвер- . тор 100, низким уровнем напряжения устанавливает триггеры 95 и 96. При 55 этом сигнал логической Г., поступающий с прямого выхода тригкера 96 на вход 90 делителя 89 частоты, устанавливает триггеры последнего в О, запрещая таким образом работу делите- 30 ля 89.
После установки триггера 95 передним фронтом сигнала Ввод в момент
кабеля после экструдера вида Y. . G. X. -HF Y ,
I iJ + l i 1, J i-i,j+l
a(di;.,; )-b T. где
jan.l
cC-Ai
о
p :ij.
Vni-C(dL.-t.) iji-i Pyi3j+i D,,j+i ;
Пз.а,-+,мин Qj-Sj+Yi. Sj -DjoBj t .
1
jan.l
промежуток времени между измерениями диаметра кабе при выходе его из экструдера;
время транспортного запаз дывания при движении кабе от экструдера до располож ного за ним измерителя ди метра изолирующего покрыт дисперсия;
35
t g сигнал логической 1, появившийся на его прямом выходе, устанавливает сигнал логической 1 на входе 19. Сигнал логического О, поступающий с инверсного выхода триггера 95 на вход начальной установки счетчика 91, подготавливает последний к следующему40 циклу-приема кода и отсчета временного интервала.
По окончании импульса Ввод в момент времени Т элементы таймера 40 вновь устанавливаются в исходное состояние.
Формула изобретения
1. Способ стабилизации толщины изоляции кабеля, заключающийся в том, что задают эталонные значения скорости подачи изолируемого кабеля и на- РЗгжного диаметра изолированного кабеля, измеряют фактические значения последнего при выходе изолированного кабеля из экструдера и из зоны охлаждения для компенсации отклонения фак
отклонению диаметра изолированного
тического значения наружного диаметра изолированного кабеля после зоны охлаждения от эталонного, пропорционально изменяя давление в экструдере и скорость подачи изолируемого кабеля, отличающийся тем, что, с целью повьщ1ения точности стабилизации, разбивают во времени весь процесс стабилизации на последовательные i-e такты, каждые N из которых составляют j-й цикл стабилизации, группируют каждые L j-x циклов в соответствующий га-й цикл стабилизации, формируют управляющее воздействие по
кабеля после экструдера ви Y. . G. X. -HF Y
I iJ + l i 1, J i-i,j+l
a(di;.,; )-b T. где
jan.l
cC-Ai
о
p :ij
Vni-C(dL.-t.) iji-i Pyi3j+i D,,j+i ;
Пз.а,-+,мин Qj-Sj+Yi. Sj -DjoBj t .
0 5 0
5
0
1
jan.l
/
с
5
промежуток времени между измерениями диаметра кабеля при выходе его из экструдера;
время транспортного запаздывания при движении кабеля от экструдера до расположенного за ним измерителя диаметра изолирующего покрытия; дисперсия;
параметр корреляционной функции значений, измеренных после экструдера; мин заданное минимальное значение диаметра кабеля; коэффициент усадки; коэффициент вероятности события ; - среднее значение диаметра
на J-M цикле; - параметры процесса изоляции
кабеля, ,
а управляющее воздействие по отклонению диаметра изолированного кабеля После зоны охлаждения задают в виде Y:
Q н
Г . Y4-Т Y
J,mt1 .m+l a j-l.
/(,- Vn.i
где --;
l-3an.,--C(0. -I jar,;) Tt,
F.
-Ьа) C(oL
trv yn t
-d
X . D,x3
J,m + i jOidrn t uHH
S
19
-П-
m+-1 .mtj.
+H
P- vfe
T. (
Tl
dl
NT,
D.
СР.Ы
-S,
Ч
дисперсия;
параметр корреляционной фунции значений величины диаметра кабеля, измеренного при выходе из зоны охлаждения;
среднее значение диаметра кабеля, измеренного при выходе из зоны охлаждения. Управляющие воздействия Y,. пдают на каждом i-м такте управления причем параметры GJ и Fj изменяют и воздействие Y подают на первом i-M такте каждого j-ro цикла а параметры Gm и F изменяют на очередном i-M такте, после того такта, в котором закончилось их вычисление. .
2, Устройство для стабилизации толщины изоляции кабеля, содержащее
3, Устройство по П.1, отличающееся тем, что узел сопряжения с объектом управления содержит блок 20 контроля информационных и управляющих сигналов, блок ввода дискретных пас- сивньгх сигналов, блок вывода аналоговой информации, программируемый таймер и пять регистров передачи данных,
младших и с входами старших разрядов, .с первым и с вторым управляющими вхо- 30 дами блока контроля информационных и. управляющих сигналов, информационный
толкающий экструзионный и тянущий механизмы с соответствующими электро- 25 щестой и седьмой информационные, пбр- приводами, первый и второй измерители вый и второй управляющие входы узла диаметра кабеля, установленные соот- соединены соответственно с входами ветственно за экструдером и за зоной охлаждения, и измеритель скорости вра щения электродвигателя толкающего механизма, входом подсоединенный к информационному выходу электропривода выход которого подключен к информаци- толкающего механизма, отличаю- онному входу программируемого тайме- щ е е с я тем, что, с целью повьщ1е- ра, к щестому информационному входу ния точности стабилизации, оно содер-35 блока ввода дискретных пассивных сиг- жит управляющую микроЭВМ, узел задания минимального значения диаметра кабеля, узел задания режима и параметров механизмов и узел сопряжения с
объектом управления, соединенный ин- 40 подсоединен к первому управляющему формационными входами с первого по входу программируемого таймера и к пятый соответственно с информационным выходом первого и с информационным выходом второго измерителей диаметра
кабеля, с задающим выходом узла зада-45 роля информационных и управляющих ния минимального значения диаметра сигналов соединен с вторым управляю- кабеля, с задающим выходом узла задания режима и параметров механизмов и с информационным выходом измерителя скорости толкающего механизма, а ана-50 логовыми управляющими выходами с первого по четвертый - соответственно с входом коррекции частоты вращения электропривода экструдера, и входом
коррекции частоты вращения электропри55 рого с первого по пятый связаны через вода толкающего механизма, с входом соответствующие регистры передачи коррекции скорости электропривода тя- данных с соответствующими информаци- нущего механизма и с входом прерыва- онными входами блока ввода дискретных
налов и к информационному входу блока вывода аналоговой информации, первый управляющий выход блока контроля информационных и управляющих сигналов
первому управляющему входу блока ввода дискретных пассивных сигналов, . второй управляющий выход блока контщим входом программируемого таймера, с вторым управляющим входом блока ввода дискретных пассивных сигналов и с управляющим входом блока вывода аналоговой информации, информационный выход блока ввода дискретных пассивных сигналов подключен к кодовому выходу узла, информационные входы котоfO
с
30224820
НИН управляющей ЭВМ, связанной первым и вторым информационными, первым и вторым управляющими выходами и информационным входом соответственно с шестым и с седьмым информационными входами, с первым и с вторым управляющими входами и с кодовым выходом узла сопряжения с объектом управления, задающий аналоговый выход узла задания минимального диаметра кабеля подключен к входу задания частоты вращения электропривода экструдера, к входу задания частоты вращения электропривода толкающего механизма и к входу задания тока электропривода тянущего механизма,
3, Устройство по П.1, отличающееся тем, что узел сопряжения с объектом управления содержит блок 20 контроля информационных и управляющих сигналов, блок ввода дискретных пас- сивньгх сигналов, блок вывода аналоговой информации, программируемый таймер и пять регистров передачи данных,
15
25 щестой и седьмой информационные, пбр- вый и второй управляющие входы узла соединены соответственно с входами выход которого подключен к информаци- - онному входу программируемого тайме- ра, к щестому информационному входу -35 блока ввода дискретных пассивных сиг- тмладших и с входами старших разрядов, .с первым и с вторым управляющими вхо- 30 дами блока контроля информационных и. управляющих сигналов, информационный
25 щестой и седьмой информационные, пбр- вый и второй управляющие входы узла соединены соответственно с входами выход которого подключен к информаци- онному входу программируемого тайме- ра, к щестому информационному входу 35 блока ввода дискретных пассивных сиг- щестой и седьмой информационные, пбр- вый и второй управляющие входы узла соединены соответственно с входами выход которого подключен к информаци- онному входу программируемого тайме- ра, к щестому информационному входу блока ввода дискретных пассивных сиг-
налов и к информационному входу блока вывода аналоговой информации, первый управляющий выход блока контроля информационных и управляющих сигналов
подсоединен к первому управляющему входу программируемого таймера и к
первому управляющему входу блока ввода дискретных пассивных сигналов, . второй управляющий выход блока контроля информационных и управляющих сигналов соединен с вторым управляю-
рого с первого по пятый связаны через соответствующие регистры передачи данных с соответствующими информаци- онными входами блока ввода дискретных
щим входом программируемого таймера, с вторым управляющим входом блока ввода дискретных пассивных сигналов и с управляющим входом блока вывода аналоговой информации, информационный выход блока ввода дискретных пассивных сигналов подключен к кодовому выходу узла, информационные входы котопассивных сигналов, управляющие выходы которого соединены с управляющими входами соответствующих регистров передачи данных, первый и второй выходы блока вывода аналоговой информации соединены соответственно с первым и с вторым аналоговыми управляющими выходами узла, третий аналоговый управляющий выход которого подключен к выходу программируемого таймера.
.4. Устройство по п.3, отличающее с я тем, что блок ввода дискретных пассивных сигналов содержит дешифратор адреса, триггер, формирующий регистр, первый и второй инверторы, вход и выход первого инвертора соединены соответственно с вторым управляющим входом блока и с S-входом триггера, D-вход которого является входом логического О блока, а С- вход соединен с выходом второго инвертора, вход которого связан с первым управляющим входом блока и с управляющим вхбдом формирующего регистра, входы .разрядов и вьгходы которого связаны соответственно с соответствующи- .ми информационными входами блока и с
информационным выходом блока, информационный, управляющий бходы и каждый адресный выход дешифратора адреса подсоединены соответственно к щестому информационному входу блока, к инверсному выходу триггера и к соответствующему управляющему выходу блока.
5. Устройство ПОП.2, отли- чающееся тем, что блок вывода аналоговой инфорйации содержит два регистра, два цифроаналоговых преобразователя, дешифратор адреса и два операционных усилителя, информац ион- ные входы регистров и дешифратора адреса соединены с информационным входом блока, управляющий вход, первый и-второй адресные .выходы дешифратора адреса связаны соответственно с управляющим входом блока, с входами синхронизации первого и второго регистров выходы первого и второго регистров подключены к входам соответственно первого и второго дифроаналоговых преобразователей, связанных.выходами через первый и второй операционные усилители соответственно с первым и вторым выходами блока.
...B4J5
33
85
37
80
8
JJ
86
35 ,B40IJ...84S$
76
74
78
23 -


| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Устройство для синхронизации распределенной вычислительной системы | 1988 |
|
SU1508201A1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Аналого-цифровая вычислительная система и аналоговая вычислительная машина (ее варианты) | 1983 |
|
SU1259300A1 |
| Арифметическое устройство цифрового вычислителя для самонастраивающихся систем автоматического управления | 1976 |
|
SU642677A1 |
| СПОСОБ ПРЯМЫХ ПОИСКОВ ГЕОЛОГИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2028648C1 |
| Устройство для контроля микроЭВМ | 1988 |
|
SU1578716A1 |
| Устройство для обучения | 1988 |
|
SU1663618A1 |
| Автоматическая балансировочная линия | 1985 |
|
SU1272134A1 |
Изобретение относится к автоматике и вычислительной технике и йожет быть использовано при автоматизации производства кабелей в виде проводов с изолирующим покрытием. Цель изобретения - повышение точности стабилизации. Устройство содержит отдающий барабан 1, толкающий механизм 2, экст- рудер 3, первый -измеритель 4 диаметра кабеля, охлаждающую ванну 5, второй измеритель 6 диаметра кабеля, тянущий механизм 7, приемный барабан 8, электропривод 9 толкающего механизма, электропривод 10 экструдера, электропривод 11 тянущего механизма, вход 12 задания частоты электропривода толкателя механизма, вход 13 задания частоты электропривода экструдера, вход 14 задания частоты электропривода тянущего механизма, вход 15 коррекции тока электропривода тянущего механиз- сл со о го to 4 00
.
75
73
30
фиг.З
3J
36,
