1
Изобретеиие относится к железнодорожному транспорту и касается устройств дистанционного управления тормозами.
Известны устройства для дистаиционного управления автотормозом железнодорожного транспортного средства, содержащие передаточный механизм, смонтированный на вагоне, размеи1,еииые на пути силовой привод и пневмоэлбктрическую систему управления и рычажную передачу автотормоза. Однако процесс дистанционного торможения вагонов при роспуске с горки трудоемок.
Цель изобретения - приведение в действие автотормоза вагона путем воздействия на рычажную передачу.
Достигается это тем, что передаточный механизм выполнен в виде шарнирного двухзвенника, концы которого образуют половину параллелограмма, две вершины которого соединены с рычажной передачей, а третья опущена; шарнирная связь расположена у оси пути и снабжена роликами, передающими усилие посредством передаточного механизма на рычажную передачу.
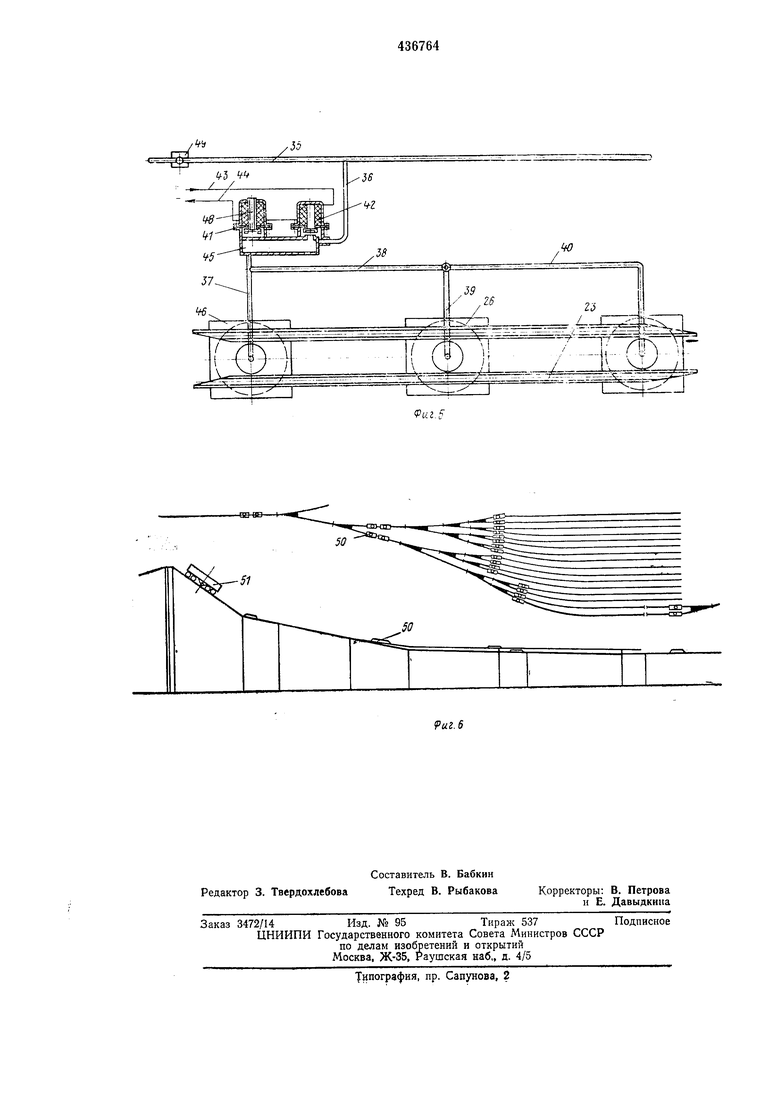
На фиг. 1 и 2 изображен передаточный механизм, установленный на вагоне, и силовой привод; на фиг. 3 - силовой привод с одной оболочкой; на фиг. 4 - то же, с двумя оболочками; на фиг. 5 - схема управления работой силового привода; на фиг. 6 -схема
размещения силовых приводов на спущенной части горки и в подгорочном парке.
Передаточный механизм устройства состоит из тяг 1, 2, 3, горизонтального рычага 4 и роликов 5. Тяги 1, 2 образуют собой половину шарнирного параллелограмма, две верщины которого расположены на хребтовой балке 6 по продольной оси вагона, а третья вершина с роликами 5 опущена вниз.
В вершинах концы тяг посажены на оси 7, 8, 9. Ось 7 вращается в кронштейне 10, а ось 8 свободно перемещается в вырезах направляющих 11. Конец 12 тяги 3 присоединен к горизонтальному рычагу 4 при помощи пальца
13. Середина рычага 4 и другой конец его прикреплены при помощи пальца 14 к штоку 15 тормозного цилиндра 16 и при помощи пальца 17 - к кронштейну 18 рамы вагона. Ролики 5 при полностью
загруженном вагоне должны размещаться несколько выше головок рельс 19. К тяге 20 прикреплены тормозные тяги 21 и 22 вагона. Подъемная рама состоит из подъемных 23 и нажимных 24 балок, соединенных
между собой поперечинами 25. Гибкие оболочки выполнены в виде гибких элементов 26, верхних 27 и нижних 28 щитов, прикрепленных герметично к гибким элементам при помощи болтов 29. В нижнем щите оболочки
имеется клапан 30, соединенный тросом 31 с
верхним щитом. Нижний щит оболочки прикреплен к шпалам шурупами 32. Силовой привод снабжеи ограничителями 33 и пружинами 34. Питапие гибких оболочек производи гея воздухом от магистрального воздухопровода 35 и далее по трубопроводам 36-40. Электропневматические клаианы 41, 42 управляются с помощью электрической цепи 43, 44. Камера 45 трубопровода 37 сообщена с гибкой оболочкой 46. Горизоптальпая тяга 47 соединена с тягой 21. Оболочка 46 сообщена с атмосферой отверстием 48. Управление процессом торможения осуществляется краном машиниста 49. Силовые приводы 50 обеспечивают целевое торможение вагонов 51.
При торможении вагона, приближаюн,егося к силовому приводу, электрический ток поступает по цепи 43 через электроппевматические клапаны 41, 42 и возврапи1ется к пульту управления по цеип 44. Якоря электропневматических клапанов 41 и 42 притягиваются, и воздух из магпстральпого воздухопровода 35 поступает по трубопроводу 36 в камеру 45 и далее по трубопроводам 37-40 - в гпбкие элементы 26 оболочек 4G. В результате, подъемная рама силового привода перемещается вверх до тех пор, пока поперечины 25 не достигнут ог)аничителей 33. Одиовременно тросы 31 натягиваются, и клапанами 30 прекращается подача воздуха в оболочки.
При пабегапип вагопа па силово привод реборды колес накатываются на нажимные балки 24 и онускают подъемную раму. После схода первой тележки вагона с нажимных балок подъемная рама вновь поднимается.
Подъемные балки 23 упираются в ролики 5 и перемещают их вверх. В результате действия вертикального усилия ось 8 тяги 2 перемещается вправо и тянет за собой тягу 3, которая поворачивает горизонтальный рычаг 4 вокруг пальца 17 и перемещает влево шток 15 тормозного цилиндра 16. Далее это усилие передается на тормозные колодки. В результате, происходит торможение вагона.
В конце силового привода ролики 5 сходят с подъемных балок 23. Под действием нружины тормозного цилиндра поршень перемещается вправо {ио чертенку), и вся система тяг автотормоза и передаточного механизма возвращается в отпускное положение. Второй, третий и другие вагоны тормозятся таким же образом.
Предмет изобретен и я
Устройство для дистаициоипого управления автотормозом железнодорожного транспортпого средства, содержащее взапмосвязанный со штоком тормозного цилиндра передаточный механизм, смонтированный на вагоне, размещенный па пути силовой привод с нневмоэлектрической системой унравлепия, отл и чающееся тем, что, с целью приведения автотормоза в действие с пути, передаточный механизм выполнен в виде шарнирного двухзвенпика, концы которого соединены рычажной нередачей, а щарнириая связь расположена у оси пути и снабжена роликами, взаимодействующими с путевыми управляющими элементами.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления автотормозом железнодорожного транспортного средства | 1971 |
|
SU436765A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АВТОТОРМОЗОМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2085423C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОТОРМОЗОМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2048343C1 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ И ГИДРАВЛИЧЕСКАЯ СИСТЕМА ДЛЯ НЕГО | 2011 |
|
RU2487033C2 |
| ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2010 |
|
RU2436696C1 |
| ДОПОЛНИТЕЛЬНАЯ ТОРМОЗНАЯ СИСТЕМА ДЛИТЕЛЬНОГО ДЕЙСТВИЯ | 2017 |
|
RU2667431C1 |
| ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2008 |
|
RU2360816C1 |
| ПРУЖИННО-ГИДРАВЛИЧЕСКИЙ ВАГОННЫЙ ЗАМЕДЛИТЕЛЬ | 2006 |
|
RU2337028C2 |
| Вагонный замедлитель | 1982 |
|
SU1232548A1 |
| МЕХАНИЧЕСКАЯ ЧАСТЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ГРУЗОВОГО ВАГОНА БУНКЕРНОГО ТИПА | 1992 |
|
RU2039677C1 |


fr
LJ
§i few:
Ф
и
S Ф
«Cj
f
