Изобретение относится к гироскопической технике и может найти применение в путеизмерителях для определения превышения рельсовых нитей по уровню, а также в объектах, совершающих движение близкое к горизонтальному.
Известен одноосный силовой горизонтальный гиростабилизатор (Богданович М.М. и др. Гироскопические приборы и устройства. Л: Изд. Судпромгиз. 1961, с. 322), содержащий гироскоп в кардановом подвесе с вертикальной осью ротора гиромотора, цепь межрамочной коррекции, включающую последовательно соединённые датчик улов прецессии на внутренней оси подвеса, усилитель стабилизации и двигатель на наружной оси подвеса, и цепь приведения, включающую последовательно соединённые маятниковый датчик угла на наружной рамке и датчик момента на внутренней оси подвеса.
Недостатком гиростабилизатора является наличие ошибки на вираже объекта из-за отклонения маятникового датчика угла от местной вертикали в сторону ложной вертикали, которое обусловлено центробежной силой вследствие действия центростремительного ускорения 
Известен одноосный силовой горизонтальный гиростабилизатор (А.С. №790923, авторы Арутюнов С.С., Хохлов В.М., опубл. 07.01.82 бюл. №1) принятый за прототип, содержащий гироскоп в кардановом подвесе с вертикальной осью ротора гиромотора, цепь межрамочной коррекции, включающую последовательно соединённые датчик угла прецессии на внутренней оси подвеса, усилитель стабилизации и двигатель на наружной оси подвеса, и цепь приведения, включающую последовательно соединённые маятниковый датчик угла на наружной рамке и датчик момента на внутренней оси подвеса, при этом в цепь межрамочной коррекции между датчиком угла прецессии и усилителем стабилизации включено суммирующе-преобразующее устройство, на один из входов которого подключён датчик линейной скорости объекта, а на другой – датчик угла прецессии.
В результате этого ось ротор гиромотора наклоняется вперёд по движению объекта на угол пропорциональный линейной скорости движения объекта, и при выполнении условия
где 




виражная погрешность будет отсутствовать.
Однако при наклонах ротора гиромотора (вектора кинетического момента) на 10-15 градусов, что необходимо для выполнения условия компенсации виражной погрешности, кроме ее компенсации, будут присутствовать нежелательные эффекты, снижающие точность работы на вираже:
1) за счёт уменьшения активной составляющей 

2) при движении и при колебаниях вагона по курсу, которые всегда присутствуют, будет возникать динамическая ошибка в результате свойств карданового подвеса.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышение точности работы одноосного силового горизонтального гиростабилизатора при движении объекта на вираже (в кривых).
Технический результат достигается тем, что в одноосном силовом горизонтальном гиростабилизаторе, содержащим платформу в одноосном подвесе, на которой установлен маятниковый чувствительный элемент с возможностью измерения отклонения платформы от плоскости горизонта, двухстепенной гироскоп, с осью подвеса гироблока которого кинематически связаны датчик угла прецессии и датчик момента, при этом выход датчика угла прецессии через усилитель стабилизации подключён к стабилизирующему мотору, кинематически связанному с осью подвеса платформы, и датчик линейной скорости объекта, новым является то, что гиростабилизатор содержит цепь компенсации, состоящую из датчика угловой скорости, установленного на платформе с осью чувствительности, перпендикулярной плоскости платформы, который соединён с первым входом блока умножения, на второй вход которого подключён датчик линейной скорости объекта, а выход блока умножения подключён на первый вход сумматора, второй вход которого соединён с выходом маятникового чувствительного элемента, выход сумматора, который является выходом цепи компенсации, соединён с входом усилителя коррекции, выход которого, подключён на вход датчика момента, при этом параметры цепи компенсации связаны соотношением
где 
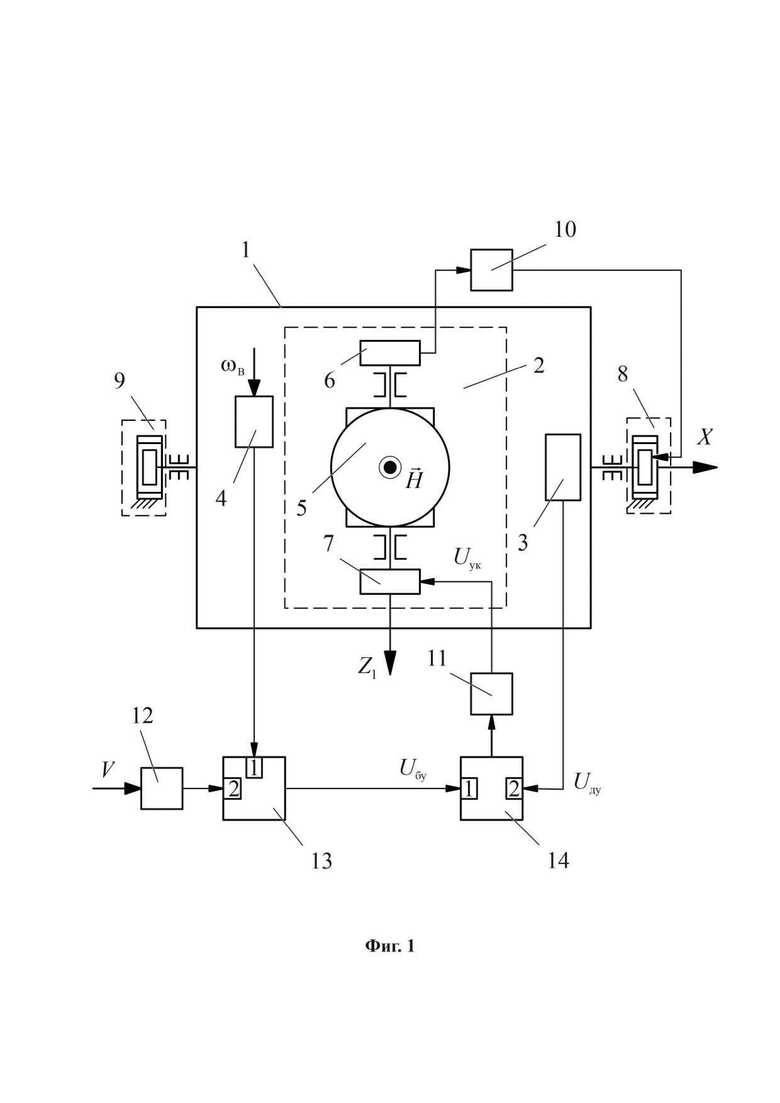
Сущность изобретения поясняется фиг.1, на которой приведена схема одноосного силового горизонтального гиростабилизатора (ОСГГС). На фиг.1 приняты следующие обозначения:
1 – платформа ОСГГС;
2 – гироскоп двухстепенной;
3 – маятниковый чувствительный элемент;
4 – датчик угловой скорости;
5 –гироблок (рамка с гиромотором);
6 – датчик угла прецессии;
7 – датчик момента;
8 – стабилизирующий мотор;
9 – системный датчик угла;
10 – усилитель стабилизации;
11 – усилитель коррекции;
12 – датчик линейной скорости объекта;
13 – блок умножения;
14 – сумматор;



Х – ось подвеса платформы;




В соответствии с фиг.1 ОСГГС представляет одноосную платформу 1, на которой закреплён двухстепенной гироскоп 2, состоящий из гироблока 5, ось подвеса 
При движении объекта в кривых (на вираже) маятниковый чувствительный элемент выдает сигнал в виде

где 


Если параметры цепи коррекции удовлетворяют условию
то выходной сигнал усилителя коррекции будет равен
в котором отсутствует влияние центростремительного ускорения.
Таким образом, если в ОСГГС скомпенсированы виражные погрешности, то погрешность формирования горизонтальной плоскости будет определяться в основном моментом дрейфа 

Кроме того, областью применения ОСГГС могут быть силовые гировертикали для подвижных объектов, совершающих движение близкое к горизонтальному. Это, к примеру, корабли, подводные лодки, путеизмерители качества железнодорожного полотна по одному из важнейших параметров – превышению рельсовых нитей по уровню в поперечной плоскости.
Применение предложенной схемы построения ОСГГС с аналитической компенсацией виражной погрешности позволяет существенно снизить величину данной погрешности, доведя ее до технологического уровня, без наклона вектора кинетического момента вперед по движению, который является источником методических погрешностей при колебаниях объекта по курсу в процессе движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| Устройство для определения и регистрации взаимного положения рельсовых нитей в вертикальной плоскости | 2017 |
|
RU2676951C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
Изобретение относится к гироскопической технике. Одноосный силовой горизонтальный гиростабилизатор дополнительно включает в себя гиростабилизатор, содержащий цепь компенсации, состоящую из датчика угловой скорости, установленного на платформе с осью чувствительности, перпендикулярной плоскости платформы, который соединён с первым входом блока умножения, на второй вход которого подключён датчик линейной скорости объекта, а выход блока умножения подключён на первый вход сумматора, второй вход которого соединён с выходом маятникового чувствительного элемента, выход сумматора, который является выходом цепи компенсации, соединён с входом усилителя коррекции, выход которого подключён на вход датчика момента. Технический результат - повышение точности работы одноосного силового горизонтального гиростабилизатора при движении объекта на вираже (в кривых). 1 ил.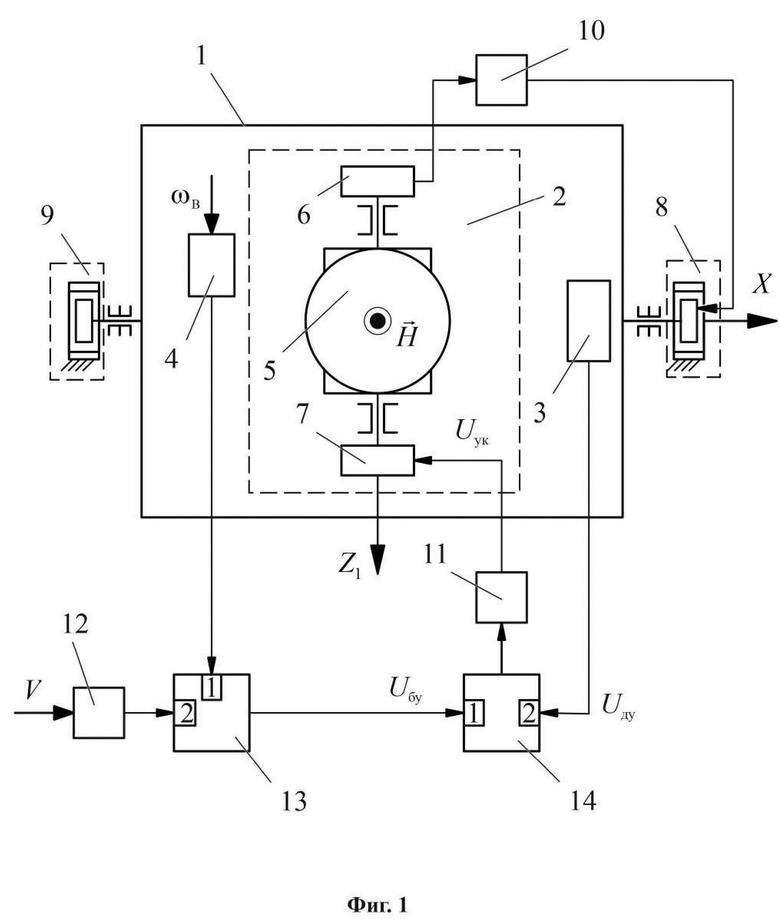
Одноосный силовой горизонтальный гиростабилизатор, содержащий платформу в одноосном подвесе, на которой установлен маятниковый чувствительный элемент с возможностью измерения отклонения платформы от плоскости горизонта, двухстепенной гироскоп, с осью подвеса гироблока которого кинематически связаны датчик угла прецессии и датчик момента, при этом выход датчика угла прецессии через усилитель стабилизации подключён к стабилизирующему мотору, кинематически связанному с осью подвеса платформы, и датчик линейной скорости объекта, отличающийся тем, что гиростабилизатор содержит цепь компенсации, состоящую из датчика угловой скорости, установленного на платформе с осью чувствительности, перпендикулярной плоскости платформы, который соединён с первым входом блока умножения, на второй вход которого подключён датчик линейной скорости объекта, а выход блока умножения подключён на первый вход сумматора, второй вход которого соединён с выходом маятникового чувствительного элемента, выход сумматора, который является выходом цепи компенсации, соединён с входом усилителя коррекции, выход которого подключён на вход датчика момента, при этом параметры цепи компенсации связаны соотношением
где 
| Одноосный силовой горизонтальный гиростабилизатор | 2019 |
|
RU2716599C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 1979 |
|
SU790923A1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| US 3527108 A, 08.09.1970. | |||

