1
Изобретение относится к технике управления гидрофицированными прузооодъемными кранами.
Известны .гидравлические следящие устройства для управления .лрузоподъемеым краном, содержащие, то крайней мере, три силовых цилиндра со штоками, соединенньгми между собой и связанными с грузозахватным оргаНО.М, насосный блок, шоясоединенный к золотникам раонределитедьного механизма, имеющего обратную связь и .цилиндры узла управления Модели крана.
Однако И3|вестные устройства сложны.
С целью упрощения конструкции следящего устройства и повышения эффективности его работы обратная связь выполнена .в виде лодсоединенных к золотникам распределительного механизма гидроцилиндров, объем которых равен объему силовых цилиндров, а ход штока равен ходу штока цилиндров управления модели крана, сообщенных с цилиндрами обратной связи.
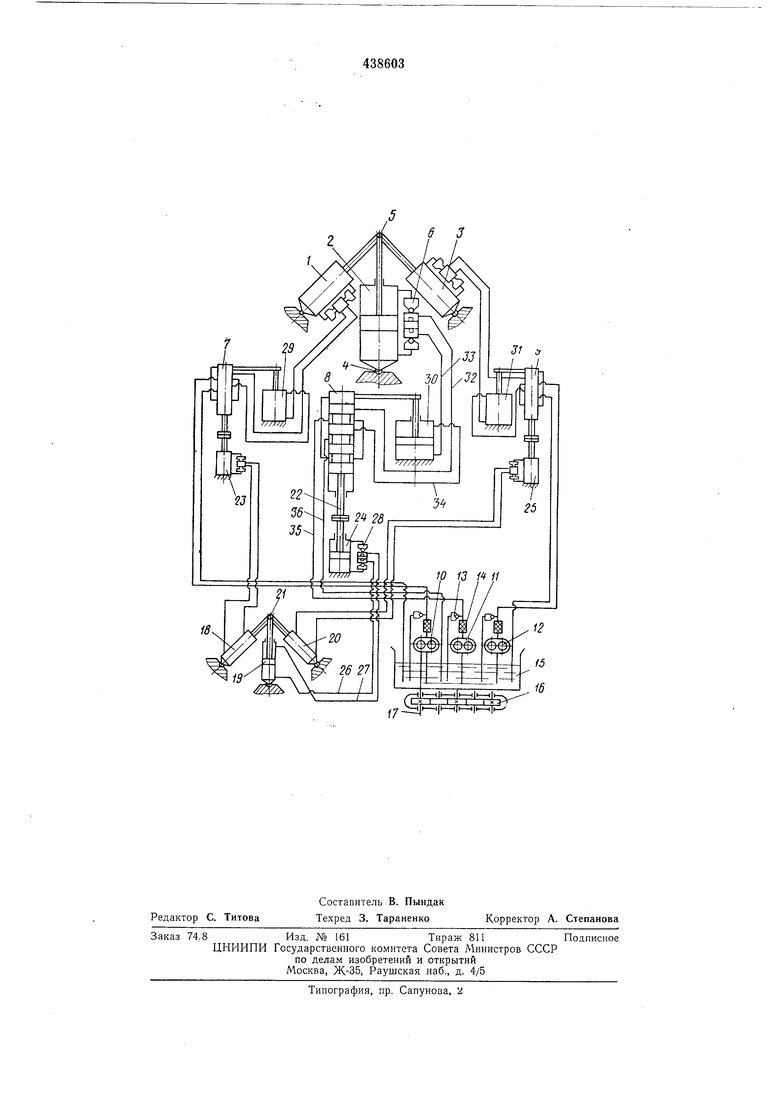
На чертеже изображена гидрокинематическая схема .предлагаемого устройства.
Кран содержит, по крайней мере, три силовых цилиндра 1-3. Шарниры 4 крепления этих цилиндров иа несущем основании (раме машины) расположены таким образоМ, что при соединении между собой в узле 5 гидроцилиндры образуют оространственную систему в виде треугольной пирамиды. К«вершине этой пирамиды - узлу 5 присоединен грузозахватный орган (на чертеже не изображен). На корпусе каждого гидроцилиндра закреплены гидрозамки 6. Каждый из гидроцилиндров через распределительный механизм, состоящий из распределителей 7-9, питается от своего гидр.он1асоса 10-12 соответственно. В цепи питания каждого цилиндра предусмотрены обратные клапаны 13 и фильтры 14. Каждый насос имеет забор рабочей жидкости из бака 15.
Насосы объединены s блок: валы всех трех .насосов соединены между собой механической передачей, наприме|р, с помощью цилиндрического редуктора 16, обеспечивающего синхронное вращение насосов. Один из валов 17 редуктора соединен с источником крутящего момента крана электродвигателем или валом отбора мощности машины.
Узел управления краном представляет собой гидравлический манипулятор, вынолненный в виде модели крана, и содержит три цилиндра 18-20 управления. Эти цилиндры соединены между собой в узле 21, скомпонованы аналогично основным силовым цилиндрам 1-3 крана и имеют ход штоков, пропорциональный ходу щтоков основных цилиндров.
к золотникам (подвижным элементам) 22
каждого распределителя 7-9 прикреплены
соответствеино штоки 23-25 трех других цилиндров управления. Штокоъая и по-ршневая полости этих цилиндров с помощью трубопроводов 26 и 27 соедиНены с одноименными полостями цилиндров 18-20 модели крана. Ход штоков цилиндров 23-25 пропорционалея соответствующим ходам щтоков осHOBiHbix цилиндров 1-3 и цилиидров 18-20 модели кра«а. Цили-ндры управления (цилиндры модели крана и цилиндры, приК(ре плениые к золотникам раепределителей) должны -быть, как правило, унифицированы между собой. К корпусам цилиндров 23-25 также прикреплены гидрозамки 28 для исключения ВОЗМОЖ1НОСТИ само-произволыного или случайного включения цепи управления. К трубопроводам цепи управления подсоединен гидроаккумулятор (на чертеже не изображен), компенсирующий возможные утечки жидкости в цилиндрах 18-20 и 23-25. При этом давление жидкости гидроаккумулятора меньше давления орл-батывания клапанов гидрозамкое 28.
К корпусу каждого распределителя 7-9 присоединены щтоки дополнительных гидроцилиндров 29-31, которые несут функции обратной связи следящего привода. Эти цилиндры с помощью трубопроводов 32-34 включены последовательно основным цилиндрам, при этом одноименные полости основных и дополнительных цилиндров соединены между собой. Гидроцилиндры 29-3 выполнены таким образом, что объем их штоковой и поршневой полостей равен соответствующим объемам основных цилиндров 1-3, а ход штока равен ходу штока цилиндров 23- 25 управления, прикрепленных к золотникам распределителей. Корпуса гидроцилиндров 29-31 и цилиндров 23-25 неподвижны, а корпуса распределителей 7-9 могут совершать возвратно-поступательное перемещение.
Распределители вьвполнены в основном обычным образом. В них имеются сверления (часть из них на чертеже условно изображена трубопроводами), соединяющие нагнетающую полость со сливной при нейтральном положении золотника, .а также соединяющие между собой соответствующие выточки на золотнике и зазолотниковое пространство для разгружении золотника от осевых усилий. От насосов к распределителям жидкость под водится по нагнетательным трубопроводам 35. Сливается жидкость по трубопроводам 36. С основными цилиндрами 1-3 распределители соединены трубопроводами 32 и 34, которые при нейтральном положении золотника перекрыты.
Устройство работает следующим образом.
Передачей «рутящего момента от вала 17 через редуктор 16 приводится в действие насосный блок, при этом валы гидронасосов 10-12 вращаются синхронно. Рабочая жидкость забирается из бака 15 и через фильтры 14 по трубопроводам 35 нагнетается к распределительному механизму. Если золотники
22 распределителей 7-9 находятся в нейтральном положени, путь жидкости к цилиндрам 1-3 закрыт, и жидкость по соответствующим сверлениям в корпусе распределителей (поступает в сливные трубопроводы 36 и затем - в бак 15. Зная направление перемещения грузозахватного органа, а следовательно, и узла 5, оператор перемещает в требуемом направлении аналогичный узел
21 на модели краеа, заставляя перемещаться щтоки цилиндров . При |Пе2,емещении щтоков в трубопроводах 26 или 27 создается давление, которое раскрывает гидрозамки 28 и вынуждает перемещаться штоки цилиндров
.
Перемещаясь, щтак цилиндра 24 увлекает за собой золотник 22 распределителя 8. Как только золотник переместится относительно корпуса на определенную величину, обусловленную конструкцией раоцределителя, нагнетательная и сливная полости последнего разобщаются. Одновременно с этим поток жидкости под давлением натравляется по одному из трубО|Проводов 32 или 34 (в зависимости
от направления перемещения золотника 22), например по трубопроводу 32. Давлением жидкости раскрывается гидрозамок 6, и жидкость поступает в штоковую полость цилиндра 2, перемещая его поршень со штоком. При
этом жидкость вытесняется из поршневой полости 1цили1ндра и приводит в действие обратную связь: проходит через раскрытый гидрозамо1К 6 и по трубопроводу 33 поступает в порщневую полость дополнительного гидроцилиндра 30, перемещая его порщень со щтоком. Перемещаясь, шток гидроцилиндра 30 увлекает за собой корпус распределителя 8. Цепи питания и управления проложены таким образом, ЧТО одноименные полости цилиндров 19 и 24 упра;вления и гидроцилиндров 2 и 30 соединены между собой. Поэтому перемещение штока цилиндра 19 по направлению совпадает с перемещением штока цилиндра 2, а направление пе ремещения золотпика 22 распределителя 8 совпадает с направлением перемеще ния «орпуса последнего, создаваемого щтоком цилиндра 30. Следовательно, основной цилиндр 2 копирует движение цилиндра 19 у1пра:вления, а корпус распределителя 8 «догоняет движущийся золофник 22. Золотник и корпус распределителя 8 двигаются с одинаковой скоростью, при этом золотник «идет впереди на расстоянии, равном первоначальному ходу включения.
При прекращен1И и движения штока цилиндра 19 прекращается движение щтока щилиндра 24 и соединенного с ним золотиика 22 распределителя. Гидрозамок 28 закрывается, зафиксировав определе1Н1ное положение штоков
цилиндров 19 и 24. Поскольку в момент остановки от распределителя 8 по трубопроводу 32 понпреж1нему подается жидкость в дилиндр 2, то вытесняемая по трубопроводу 33 из этого цилиндра жидкость продолжает перемещать порщень со штоком цилиндра 30 и корпус распределителя 8. Как только корпус распределителя сместится относительно остановившегося золотника 22 на величину первоначального выключения, нагнетательные и сливные полости распределителя соединяются между собой, а трубопроводы 32 и 34 перекрываются, жидкость по трубопроводу 36 идет на слив. С прекращением подачи жидкости к цилиндру 2 его гидрозамок 6 закрывается, штоки цилиндра 2 и параллельно соединемного с ннм цилиндра 30 фиксируются в определенном положении, пропорциональном положениям штоков цил И1НДров 19 и 24.
При перемещении золотника 22 распределителя В противоположном направлении жидкость нагнетается по трубопроводу 34 в штоковую полость цилиндра 30. Образова-вшееся в этом цилиндре давление перемещает шток с поршнем, и жидкость из поршневой полости цилиндра 30 по трубопроводу 33 и через гидрозамок 6 поступает в порщневую полость гидроцилиндра 2, перемещая его поршень со штоком. Остальные операции происходят подобнО вы:ше рассмотренному случаю.
Если при управлении краном перемещается не только щток цилиндра 19, но и другие цилиндры управления 18 или 20, управление и питание силовых цилиндров 1 и 3 крана происходит аналогично цилиндру 2. В процессе эволюции узла 5 крана относительно основаНИН могут одновременно работать как все три цилиндра 1-3, так и один или два из этих цилиндров. Любой цилиндр может включаться в работу в произвольном положении поршня со штоком относительно корпуса цилиндра. Если какой-либо из цилиндров не
включен в работу, жидкость доходит только до соответствующего распределителя 7, 8 или 9, затем по сливным трубопроводам возвращается в бак 15. В случае, если к узлу 5 крана приложена нерасчетная на грузка или полностью использован ход поршня цилиндра 1, 2 или 3, срабатывает соо-иветствующий предохранительный клапан 13. После завершения работы крана выключается насосный блок: вал 17 редуктора 16 отключается от источника крутящего момента.
Таким образом, управление силовыми цилиндрами крана сводится к перемещению по необходимой траектории узла 21 модели крана.
П (р е д м е т изобретения
Гидравлическое следящее устройство для управления грузоподъемным краном, содержащее, по крайней мере, три силовых цилиндра со штоками, соединенными между собой и связанными с грузозахватным органом, насосный блок, подсоединенный к золотникам распределительного механизма, имеющего обратную связь и цилиндры узла управления модели крана, отличающееся тем, что, с целью упрощения устройства и повышения эффективности его работы, обратная связь выполнена в виде подсоединенных к золотникам гидроцилиндров, объем которых равен объему силовых цилиндров, а ход штока равен ходу штока цилиндров управления модели к,рана, сообщенных с цилиндрами обратной связи.
5 3
., JrriJ-| - |f


| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления гидравлическим прессом | 1986 |
|
SU1361019A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| ГИДРОПРИВОД | 2016 |
|
RU2665762C2 |
| Устройство управления самоходной сельскохозяйственной машиной | 1985 |
|
SU1287763A1 |
| Гидравлический привод стрелового самоходного крана | 1976 |
|
SU660926A1 |
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| Устройство для управления силовыми гидравлическими цилиндрами | 1975 |
|
SU699238A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СКВАЖИННОГО НАСОСА | 2022 |
|
RU2788797C1 |
| Гидравлический привод для ударногоСТРугА | 1979 |
|
SU815289A1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ВОДОМЕТНОГО ДВИЖИТЕЛЯ | 2022 |
|
RU2776626C1 |