СО 4i О)
СО
Изобретение относится к управлению одноковшовых экскаваторов с жесткой подвеской рабочего оборудования, а именно к гидроприводам экскаваторов.
Известен следящий гидропривод совмещенного управления одновременно несколькими механизмами рабочего оборудования одноковщовых экскаваторов, имеющие управляющую модель в виде, щарнирно сочлененных рычагов управления механизмами рабочего оборудования с элементами управления (включающими устройствами) и рукояткой на конечном рычаге, жесткую отрицательную обратную связь рабочего оборудования с управляющей моделью, гидрораспределители, гидроцилиндры привода на рабочем оборудовании и элементы рабочего оборудования (например, стрела, рукоять, ковш). Этот следящий гидропривод совмещенного управления обеспечивает копирование в масштабе рабочим органом (например, ковшом) траектории движения рукоятки управляющей модели, что упрощает процесс управления экскаватором и улучщает эргономические показатели качества последнего 1.
Однако указанный гидропривод характеризуется сложностью конструкции, наличием больщого количества агрегатов в обратной связи, что делает эти устройства малонадежными.
Наиболее близким к предлагаемому является гидропривод рабочего оборудования одноковшового экскаватора, включающий многозвенную управляющую модель механизмов рабочего оборудования с каналами управления, каждый из которых выполнен из последовательно соединенных трехпозиционного электрического переключателя, коммутирующего элемента, гидрораспределителя с электрогидравлическим управлением, гидроцилиндра привода элемента рабочего оборудования и блока обратной связи.
Устройство обеспечивает движение рабочего органа экскаватора по задаваемой траектории. Оно состоит из п-звенной управляющей модели, п-каналов управления механизмами, где п - количество механизмов рабочего оборудования (например, механизм подъема стрелы, поворота рукояти и др). Управляющая модель состоит из соединенных щарнирно п-рычагов управления. У гидропривода каждый из каналов управления механизмами состоит из блока обратной связи, гидрораспределителя, гидроцилиндра привода элемента рабочего оборудования, элемента управления. Элемент управления выполнен в виде последовательно соединенных трекпозиционного переключателя и коммутирующего элемента (например, полупроводникового или релейного). Гидрораспределитель выполнен двухступенчатым, с двумя электромагнитами и раздельным сливом. Блок обратной связи содержит два делителя потока, дополнительный гидрораспределитель, два гидрозамка и гидроцилиндр слежения 2.
Однако указанный гидропривод характеризуется сложной конструкцией блоков обратной связи, что ведет к недостаточной надежности гидропривода.
Цель изобретения - повышение ,надежности гидропривода.
Указанная цель достигается тем, что у гидропривода рабочего оборудования одноковщового экскаватора, включающего многозвенную управляющую модель механизмов рабочего оборудования с каналами
управления, каждый из которых выполнен из последовательно соединенных трехпозиционного электрического переключателя, коммутирующего элемента, гидрораспределителя с электрогидравлическим управлением, гидроцилиндра привода элемента
рабочего оборудования и блока обратной связи, последний каждого канала управления выполнен из дроссельного делителя потока с электромагнитом, ступенчато изменяющим настройку одного из дросселей, щестиходового гидрораспределителя с электромагнитным управлением, гидрозамка и гидроцилиндра слежения, при этом полости гидроцилиндра слежения соответственно связаны с выходами шестиходового распределовителя, вход которого связан с одним из выходов делителя потока и третий выход через гидрозамок - со сливом, а выход гидрораспределителя канала управления связан с входом делителя потока и камерой управления гидрозамка.
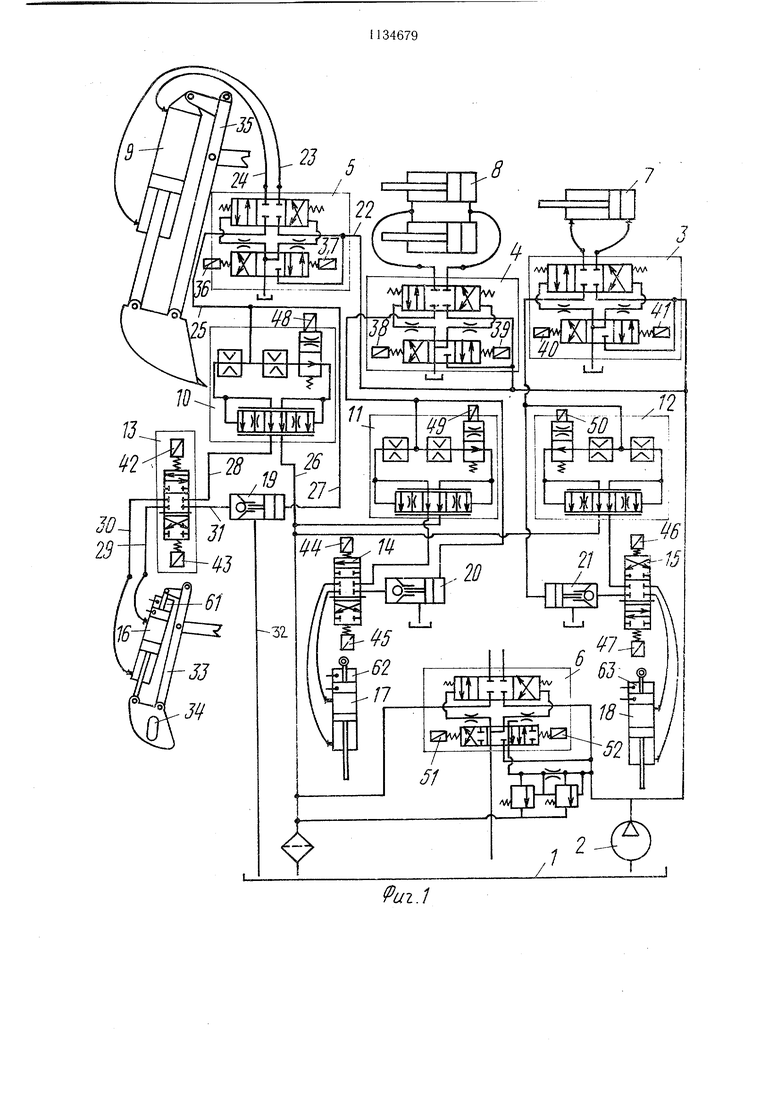
На фиг. I изображена принципиальная
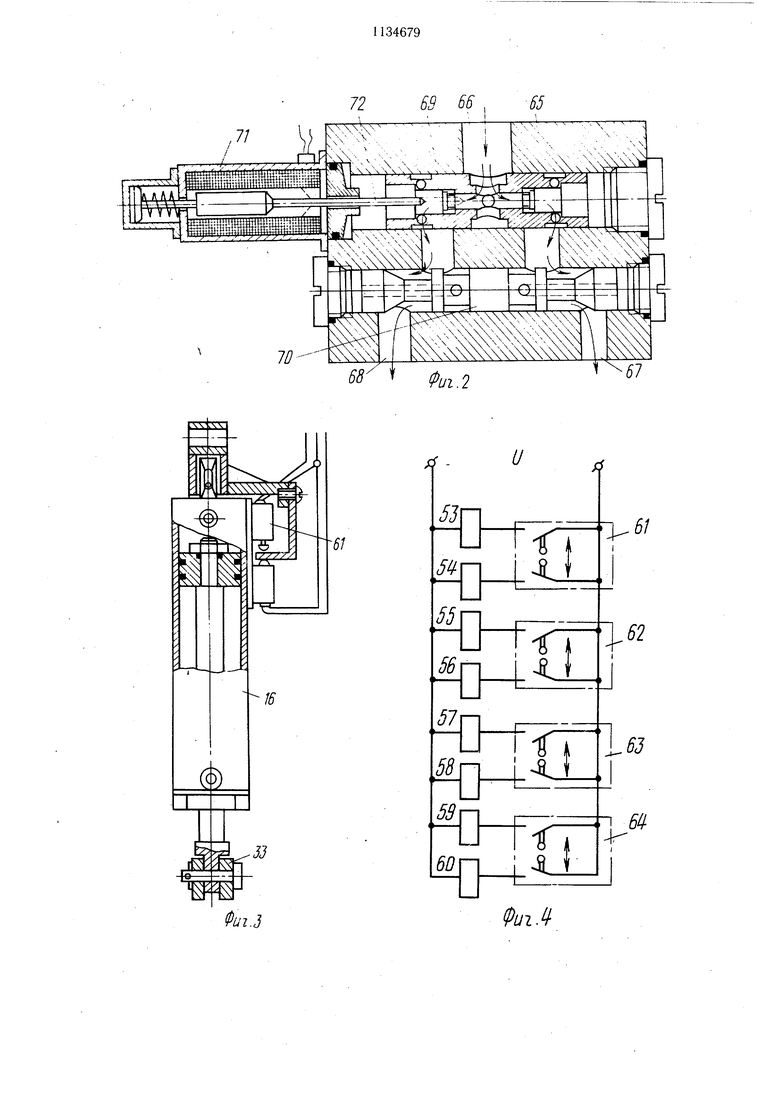
гидравлическая схема управления рабочим оборудованием гидравлического одноковшового экскаватора; на фиг. 2 - делитель потока со ступенчатым изменением настройки; на фиг. 3 - гидроцилиндр слежения,
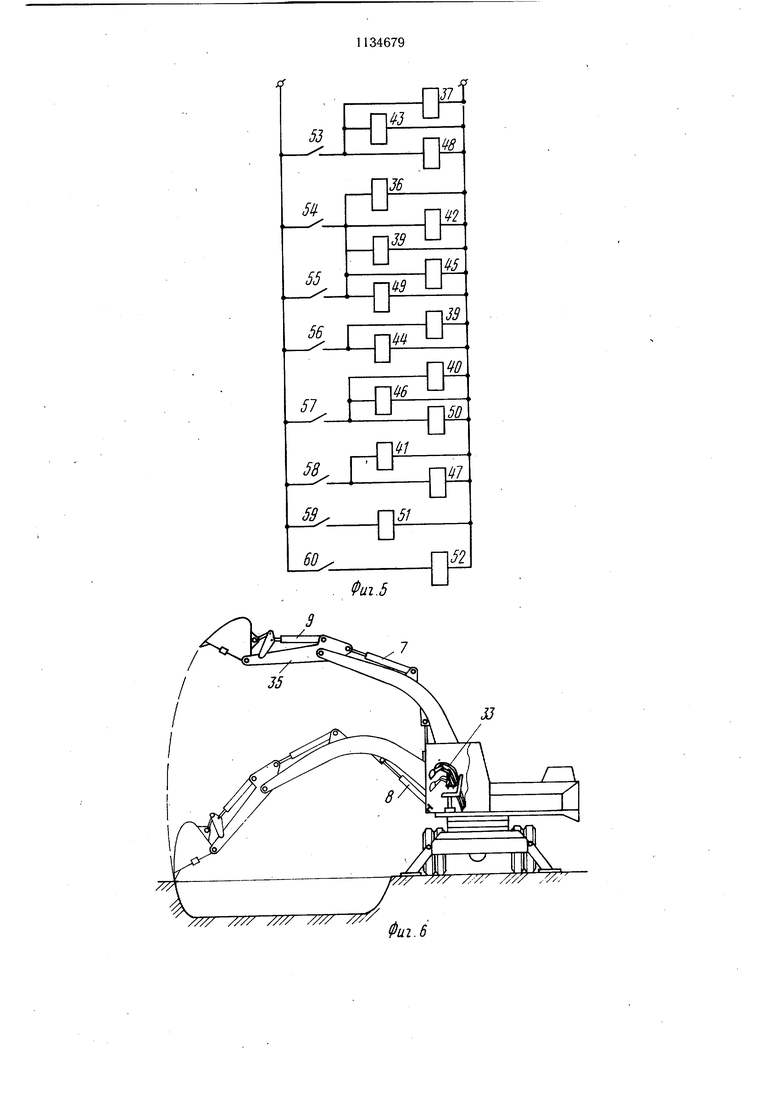
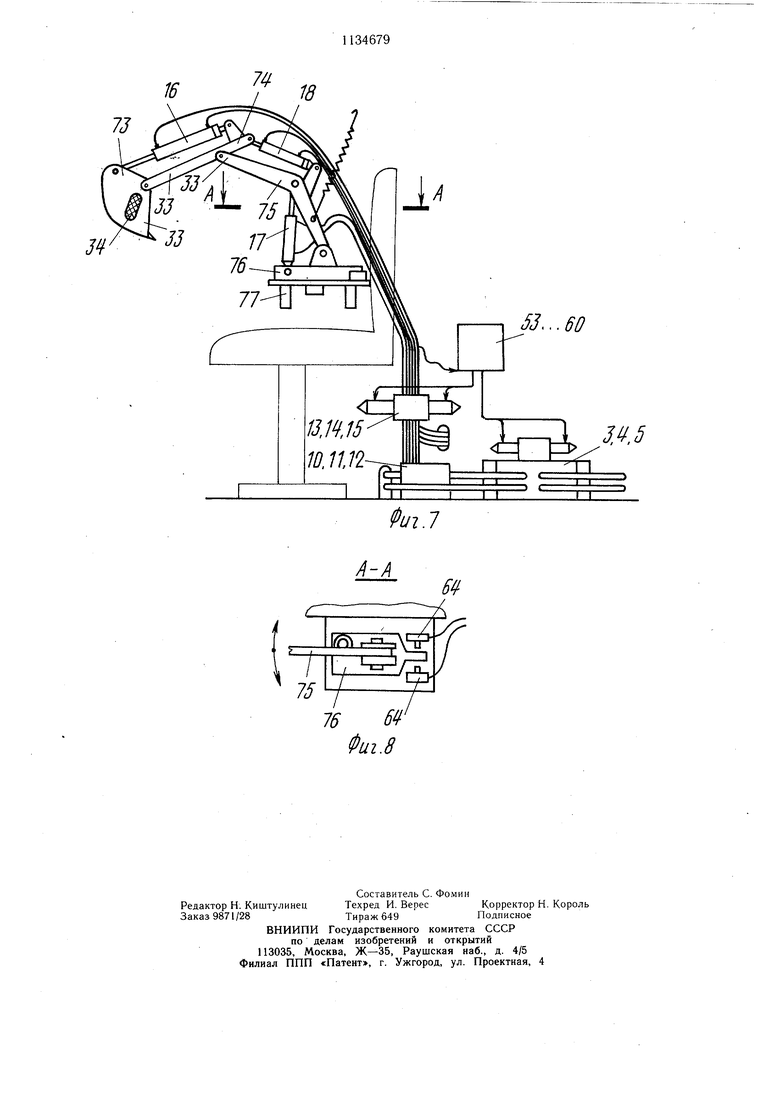
выполненный заодно с трехпозиционным электрическим переключателем; на фиг. 4 и 5 - электрические схемы, поясняющие связи между электрическими переключателями, коммутирующими релейными элементами и электромагнитами гидрораспределителей и делителей потока; на фиг. 6 - гидравлический одноковшовый экскаватор с рабочим оборудованием «Обратная лопата и управляющей моделью в кабине; на фиг. 7 - управляющая модель для соответствующего рабочего оборудования; общий вид; на фиг. 8 - разрез А-А на фиг. 7.
Гидравлический приво.а сострит из гидробака 1, насоса 2, гидрораспределителей 3-6 привода с электрогидравлическим управлением для ковша, стрелы, рукояти
и поворота платформы соответственно, гидроцилиндров привода 7,8,9, делителей 10-12 потока со ступенчатым изменением настройки с помощью электромагнита, установленных на сливных линиях после гидрораспределителей 3,4,5 шестиходовых гидрораспределителёй 13-15 с электромагнитным управлением, гидроцилиндров 16-18 слежения, выполненных заодно с трехпозиционными электрическими переключателями, гидрозамков 19-21, установленных на сливе после гидрораспределителей 13 - 15, трубопроводов 22-32. п-звенная управляющая модель 33, состоящая из опорной пластины, поворотной площадки, рычага стрелы, рычага рукояти и рычага ковша с ручкой 34, выполняется геометрически подобной рабочему оборудованию 35 экскаватора (фиг. 6), состоящему из стрелы, рукояти и ковща. Электромагниты 36-41, 42-47, 48-50, 51 и 52 соответственно гидрораспределителей 3-5, гидрораспределителей 13-15, делителей 10-12 потока и гидрораспределителя 6 включаются или выключаются контактами реле 53-60 (фиг. 4). Элементы управления механизмами ковща, стрелы, рукояти и поворота платформы экскаватора содержат трехпозиционные переключатели 61-63 и 64 соответственно. Гидроцилиндр 16 слежения (например, для механизма ковша) выполнен заодно с трехпозиционным переключателем 61 (фиг. 3).Переключатель 61 состоит из двух микропереключателей, закрепленных на корпусе гидроцилиндра, и нажимной скобы, имеющей люфт вдоль оси цилиндра по направляющему хвостовику квадратного сечения.
Делитель потока состоит из корпуса 65, имеющего входное отверстие 66, два выходных 67 и 68, делительного золотника 69 с двумя калиброванными отверстиями (диафрагмами), плавающего порщня 70, электромагнита 71, якорь которого соединен со стержнем 72. При одной настройке делителя его электромагнит не включен и якорь маг-нита под действием возвратной пружины находится в положении, изображенном на фиг. 2. Поток жидкости, подаваемый в отверстие 66, делится в отнощении, рарном отнощению площадей проходных сечений диафрагм, т. е. больщая доля выходит через сливное отверстие 68, а малая доля - через отверстие 67. Это отношение потоков за счет перемещения поршня 70 выдерживается постоянным даже при изменении давления в отводных линиях. При другой настройке магнит включен. Якорь последнего со стержнем 72 перемещается. Стержень, войдя в отверстие диафрагмы, образует дроссель с кольцевым проходным сечением. В этом случае поток делится в другом отношении, так как изменилось отношение площадей дросселей в делительном золотнике. Доля потока, отводимая через отверстие 67, больще, чем в первом случае. При перемещений якоря жидкость во внутренней полости магнита перетекает по продольным пазам на якоре.
Управляющая модель 33 выполнена таким образом, что рычаг 73 ковша (фиг. 7) может поворачиваться в вертикальной плоскости относительно рычага 74 рукояти, соответственно рычаг рукояти - относительно рычага 75 стрелы, а рычаг стрелы - относительно .поворотной площадки 76 с хвостовиком. Последняя при повороте в горизонтальной плоскости относительно опорной пластины 77 хвостовиком может включать микропереключатели 64.
Принцип работы гидропривода заключается в следующем.
Машинист экскаватора находится в кабине (фиг. 6 и 7) и, взявшись одной рукой за рукоятку 34 управляющей модели, водит ею в пространстве (в пределах рабочей зоны руки) по траектории требуемой формы. Ковщ описывает подобную траекторию. При этом работают одновременно несколько механизмов рабочего оборудования экскаватора. Поскольку следящие гидравлические системы управления механизмами стрелы, рукояти и ковша аналогичны (фиг. 1), принцип работы достаточно рассмотреть на одном, .например, механизме ковша. При повороте машинистом ручки 34 на рычаге ковша управляющей модели 33 по часовой стрелке в вертикальной плоскости (т. е. на отворот ковща) гидроцилиндр слежения (фиг. 3) перемещается вверх, выбирая люфт, при неподвижной нажимной скобе. Скоба нажимает шток нижнего микропереключателя, замыкается один из контактов переключателя 61. Это приводит (фиг. 4, 5) к включению реле 54 и затем к срабатыванию электромагнитов 36 и 42 соответственногидрораспределителей 5 и 13. Причем окончание перемещения золотника распределителя 13, рассчитанного на меньший расход, произойдет раньше, чем у распределителя 5, так как первый имеет меныйее время срабатывания. Линия обратной связи подготовлена до начала действия цилиндра 9 привода ковша. Жидкость от насоса по трубопроводам 22 и 23 поступает в штоковую полость гидроцилиндра 9. Поскольку в линиях управления золотником распределителя 5 установлены дроссели, трогание штока цилиндра 9 на втягивание происходит плавно. Элемент рабочего оборудования 35 - ковш - начинает совершать отворот. Из поршневой нерабочей полости гидроцилиндра 9 слив происходит по трубопроводам 24 и 25. В делителе потока 10 (его магнит не включен - первая настройка) происходит разделение потока. Больщая часть его сливается в гидробак 1 по трубопроводу 26, а меньшая доля - по трубопроводу 28 через дополнительный гидрораспределитель 13, по трубопроводу 30 поступает в штоковую полость гидроцилиндра 16 слежения. Из поршневой полости последнего жидкость сливается в бак по трубопроводу 29, через распределитель 13, по трубопроводу 31, через гидрозамок 19 и по трубопроводу 32. Гидрозамок 19 открыт, так как управляется давлением перед делителем 10 потока (трубопровод 27). Гидроцилиндр 16 при этом сокращается, и машинист ощущает, что ручка поддается, и рычаг ковща отворачивается, как отворачивается ковш. Если машинист прекращает поворачивать ручку на отворот ковша, то сокращающийся гидроцилиндр 16 выключает трехпозиционный переключатель 61, следовательно, реле 54 и электромагниты 36 и 42, включенные им. Полости гидроцилиндра 9 перекрываются, ковш останавливается. Останавливается и гидроцилиндр 16, так как его полости перекрываются золотником в нейтрали распределителя 13.
При повороте ручки управления в другую сторону (против часовой стрелки) замыкается другая пара контактов электрического трехпозиционного переключателя 61, что приводит к включению реле 53, затем - электромагнитов 37, 43 и 48 соответственно гидрораспределителя 5, гидрораспределителя 13 и делителя 10 потока. Причем магниты 43 и 48, воздействующие на золотник малой .массы гидрораспределителя 13 и стержень 72 делителя 10 потока, сработают быстрее, и линия обратной связи подготовлена до начала движения гидроцилиндра 9. Жидкость от насоса 2 поступает по трубопроводу 22, через гидрораспределитель 5, по трубопроводу 24 в поршневую полость гидроци.чиндра 9. Шток, плавно трогаясь, выдвигается, и ковш начинает подворачиваться. Из штоковой полости жидкость сливается
по трубопроводу 23, через распределитель 5, по трубопроводу 25 в делитель 10 потока. Поскольку магнит делителя включен, доля потока, поступающего по трубопроводу 28
через гидрораспределитель 13, по трубопроводу 29 в порщневую полость гидроцилиндра слежения, больше, чем в первом случае. Изменение настройки делителя требуется потому, что в отличие от первого случая,
, жидкость сливается не из поршневой полости гидроцилиндра 9 в штоковую гидроцилиндра 16, а из штоковой гидроцилиндра 9 в поршневую гидроцилиндра 16. Из штоковой полости гидроцилиндра 16 жидкость выдавливается через трубопровод 30, а далее, как и в первом случае, - через гидрораспределитель 13, трубопровод 31, гидрозамок 19 и трубопровод 32 - в бак. При прекращении поворота рукояткой выключение реле и электромагнитов происходит вследствие того, что гидроцилиндр cлeжeнияJ продолжающий раздвижение, выключает трехпозиционный переключатель, а далее как в первом случае.
Таким образом работают следящие сис5 Teivibi управления п механизмами рабочего оборудования. Когда машинист не просто поворачивает ручку управляющей модели, а еще и движет ее, например вперед-вниз, то одновременно включаются и работают следящие системы управления механизмами 0 стрелы и рукояти, пока движется соответствующий рычаг управляющей модели. Рабочее оборудование экскаватора движется так, как управляющая модель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления рабочим оборудованием гидравлического одноковшового экскаватора | 1978 |
|
SU903491A1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| Одноковшовый неполноповоротный экскаватор | 1986 |
|
SU1321791A1 |
| Гидравлический привод одноковшового экскаватора | 1980 |
|
SU933900A1 |
| Рабочее оборудование одноковшового экскаватора | 2023 |
|
RU2808751C1 |
| Рабочее оборудование обратной механической лопаты | 1989 |
|
SU1701833A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 2018 |
|
RU2709270C1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1991 |
|
RU2019649C1 |
| Одноковшовый экскаватор | 1990 |
|
SU1763586A1 |
ГИДРОПРИВОД РАБОЧЕГО ОБОРУДОВАНИЯ ОДНОКОВШОВОГО ЭКСКАВАТОРА, включающий многозвенную управляющую модель механизмов рабочего оборудования с каналами управления, каждый из которых выполнен из последовательно соединенных трехпозиционного электрического переключателя, коммутирующего элемента, гидрораспределителя с электрогндравлическим управлением, гидроцилиндра привода элемента рабочего оборудования и блока обратной связи, отличающийся тем, что, с целью повышения надежности гидропривода, блок обратной связи каждого канала управления выполнен из дроссельного делителя потока с электромагнитом, ступенчато изменяющим настройку одного из дросселей, щестиходового гидрораспределителя с электромагнитным управлением, гидрозамка и гидроцилиндра слежения, при этом полости гидроцилиндра слежения соответственно связаны с выходами шестиходового гидрораспределителя, вход которого связан с одним их выходов делителя потока и третий выход через гидрозамок - со сливом, а выход гидрораспредеi лителя канала управления связан с входом делителя потока и камерой управления гидрозамка.
иг.1
Фиг.З
Фиг Л
/
35
//// ///У /77Фиг. 6
7J
77-41
г
7
I 15
16 б
Фиг.
А-А
6if
--А
r
Фиг.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СОВМЕЩЕННОЕ СЛЕДЯЩЕЕ УПРАВЛЕНИЕ ОДНОКОВЩОВЫМ ГИДРАВЛИЧЕСКИМ ЭКСКАВАТОРОМ | 0 |
|
SU210756A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления рабочим оборудованием гидравлического одноковшового экскаватора | 1978 |
|
SU903491A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
