1
Изобретение относится к области измерительной техники и машиностроения и может быть использовано, например, для стабилизации зазора между газовым резаком и поверхностью металла.
Известны бесконтактные следящие системы, состоящие из корпуса, предназначенного для установки газового резака, реверсивного привода для его подъема и опускания, струйного датчика положения, скрепленного с корпусом, двух струйных реле, сообщенных входами с выходом струйного датчика положения одно непосредственно, а другое через дроссельный делитель, и двух дискретных пневмоэлектрических преобразователей, по одному в электрических цепях подъема и опускания.
В известной системе зазор измеряется датчиком положения, смещенным относительно точки резания металла, поэтому возникает ощибка стабилизации зазора, которая зависит от расстояния между резаком и датчиком положения угла между линией резания и поверхностью металла, а также от положения датчика относительно линии резания.
Цель изобретения - повысить точность слежения.
Это достигается тем, что следящая система снабжена двумя скрепленными с корпусом дополнительными струйными датчиками положения идентичными первому, каждый
с двумя струйными реле, и струйным логическим устройством, реализующим операции «два из трех, входы которого сообщены с выходами реле, а выходы - с входами пневмоэлектрических преобразователей.
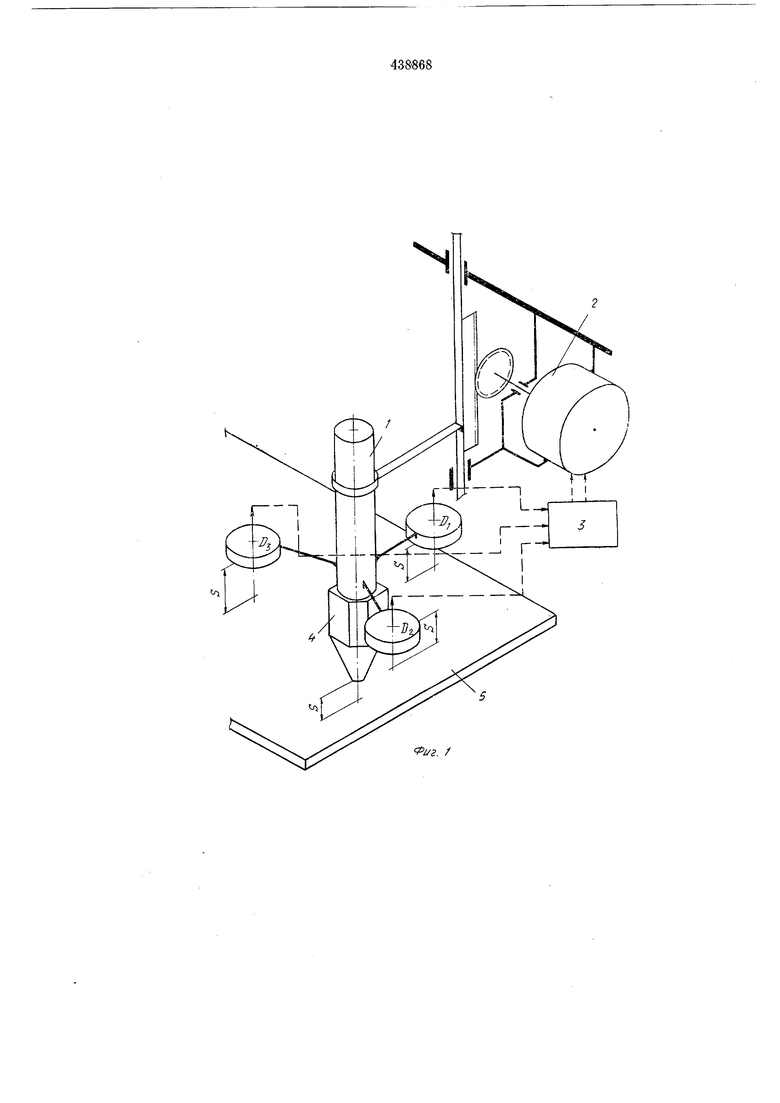
На фиг. 1 изобрал ;ена предлагаемая система, общий вид; на фиг. 2 - принципиальная схема системы. Бесконтактная следящая система состоит
из корпуса 1, реверсивного привода 2, трехструйных датчиков положения DI, DZ и DZ, расположенных симметрично относительно корпуса 1 и скрепленных с ним, и блока 3 управления приводом 2.
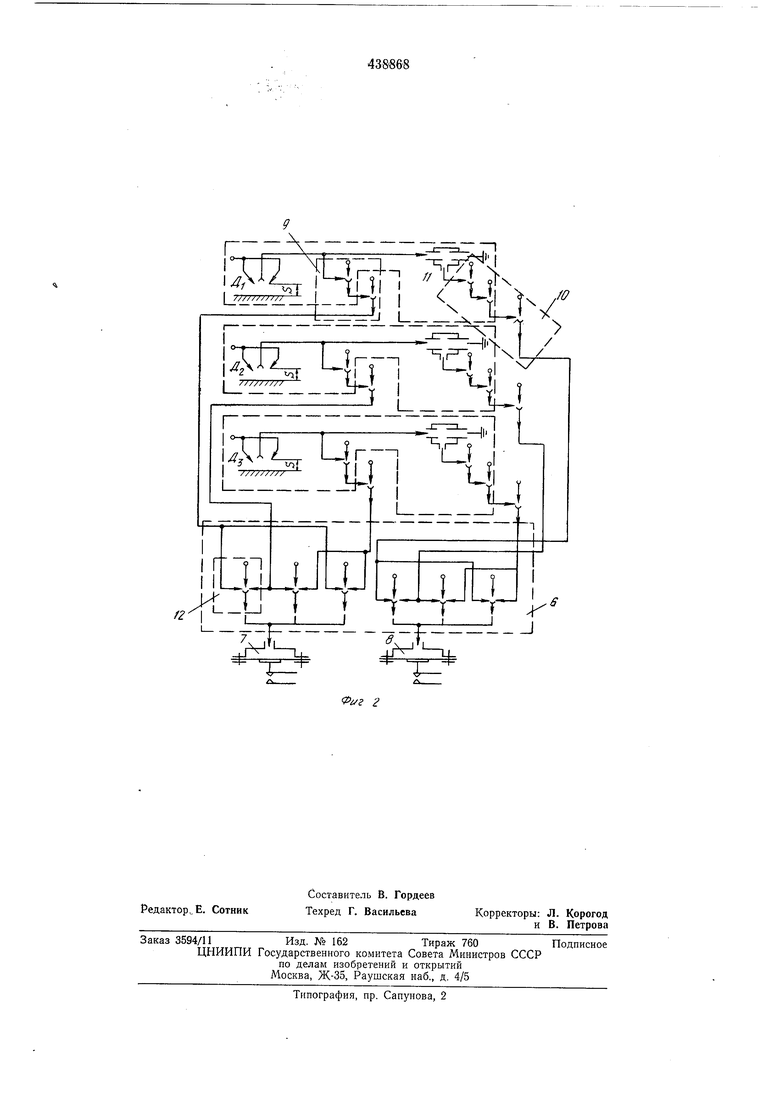
В корпусе 1 размещен термический резак 4, который вместе с корпусом может перемещаться в поперечных направлениях относительно разрезаемого металла 5. Блок 3 управления состоит из трех идентичпых каналов усиления сигналов датчика положения D, логического устройства 6. реализующего операции выбора «два из трех и двух дискретных пневмоэлектрических преобразователей 7 и 8, включенных в электрические цепи привода 2 соответственно для подъема и опускания корпуса 1. Каждый из каналов усиления сигналов включает в себя двухкаскадное струйное реле 9, трехкаскадное инверсное струйное реле 10 и дроссельный делитель 11. Вход струйного реле 9 сообщен с выходом датчика положения непосредственно, а вход струйного реле 10 - с тем же выходом через дроссельный делитель 11.
Логическое устройство 6 выполнено из шести струйных логических элементов 12 «НЕ- ИЛИ, сгруппированных по три элемента. Входы первой групны элементов 12 сообщены с выходами струйных реле 9, входы второй группы элементов - с выходами струйных реле 10, так, что в каждой группе на одном из элементов сравниваются сигналы с датчиков положения DI и D2, на другом - с датчиков пололсения D и D, а на третьем - с датчиков положения DI и Оз. Выходы струйных логических элементов 12 в каждой группе объединены и сообщены с входами дискретных пневмоэлектрических преобразователей 7 и 8.
Бесконтактная следящая система работает следующим образом.
При лодаче сжатого воздуха в струйные датчики положения DI, DZ и Ьз на их выходах возникают избыточные давления, которые тем больще, чем меньще зазор 5 между датчиком и поверхностью металла 5.
Струйные реле 9 и 10 преобразуют эти давления в дискретные пневматические сигналы «О и «I. Характеристики струйных реле и дроссельного делителя 11 подобраны таким образом, что при номинальном зазоре 5 на выходах из струйных реле 9 и 10 возникают сигналы «I, при уменьшенном зазоре на выходе реле 9 возникает сигнал Л, а выходе инверсного реле 10 - противоположный сигнал «О, при увеличенном зазоре на выходе реле 9 возникает сигнал «О, а на выходе инверсного реле 10 - сигнал «I. В свою очередь, струйный логический элемент «НЕ-ИЛИ выдает сигнал «I при наличии на двух его входах сигналов «О и сигнал «О во всех других случаях.
Когда траектория резания параллельна поверхности металла 5 и зазор между всеми тремя датчиками положения DI, Dg и DS и поверхностью металла 5 равен номинальному, на выходах логического устройства сигналы равны «О, электроконтакты пневмоэлектрических преобразователей разомкнуты и привод 2 выключен. Состояние привода не изменится, если отклонение зазора от номинального значения зафиксирует какой-либо один датчик, либо один датчик зафиксирует уменьшение зазора, а другой - его увеличение. Однако, как только два любых датчика или все три датчика положения D зафиксируют отклонение зазора, в одну и ту же сторону замкнутся контакты соответствующего нневмоэлектрического преобразователя 7 нли 8 и привод 2 начнет перемещать корпус н размещенный в нем термический резак 4 для ликвидации отклонения зазора.
Например, если зазор между датчиками D и Z)2 и поверхностью разрезаемого металла окажется больше нормы, на выходах сообщенных с ними двухкаскадных струйных .реле 9 появятся сигналы «О, что вызовет изменение сигнала на выходе управляемого ими струйного логического элемента 12 с «О на «1, контакты пневмоэлектрического преобразователя
7 замкнутся и привод 2 начнет опускать корпус 1 на поверхность металла 5 до восстановления номинального зазора.
Повышение точности слежения достигается следующим. В слежение за зазором между
термическим резаком 4 и поверхностью металла 5 не вносится инструментальная ошибка, обусловленная смещением датчиков положения DI, DZ и Дз относительно точки резания, если хотя бы один из датчиков положения
распололсен в плоскости, перпендикулярной линии резания. Кроме того, максимальная инструментальная погрешность, когда какой-лнбо датчик расположен на линии резания, не превышает половины погрешности при унравленни по показаниям одного датчика пололсения.
Предмет изобретения
Бесконтактная следящая система, содерл ащая предназначенный для установки инструмента, например термического резака, корпус, реверсивный привод для его подъема н опускания, струйный датчик положения, скрепленный с корпусом, два струйных реле,
сообщенных входами с выходом струйного датчика ноложения одно непосредственно, а другое через дроссельный делитель, и два дискретных пневмоэлектрнческих преобразователя, по одному в электрических цепях подъема и опускания, отличающаяся тем, что, с целью повышения точности слежения, она снабжена двумя скрепленными с корпусом дополнителыными струйными датчиками положения идентичными первому, каждый
также с двумя струйными реле, и струйным логическим устройством, реализующим операции «два из трех, входы которого сообщены с выходами реле, а выходы - с входами пневмоэлектрических преобразователей.
fuz. /
у
v .
4 - I I X т 1
ТЬ
,зат, Цгп Ь
г
I ///////// 1
11 у
I
г
Цг °|
///// ///1 I I У-.
I
хТ I1
Ml
/(7
/
н
/
г
u
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНАЯ СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2066844C1 |
| Цифровой имитатор воздушных давлений | 1985 |
|
SU1265728A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| МОДУЛЬНОЕ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМИ ЭЛЕМЕНТАМИ МНОГОСЕКЦИОННОЙ ВЫТЯЖКИ СТОЛОВ ТЕРМИЧЕСКОЙ РЕЗКИ И ЕГО ЭЛЕКТРОННЫЙ МОДУЛЬ УПРАВЛЕНИЯ | 2024 |
|
RU2838276C1 |
| Бесконтактная следящая система за положением инструмента | 1979 |
|
SU861940A1 |
| СИСТЕМА УПРАВЛЕНИЯ КООРДИНАТНОЙ МАШИНОЙ ДЛЯ ТЕРМИЧЕСКОГО РАСКРОЯ ЛИСТОВОГО МЕТАЛЛА | 1973 |
|
SU394172A1 |
| Система централизованного контроля параметров,представленных пневматическими сигналами | 1978 |
|
SU742878A1 |
| Пневматическое устройство для контроля линейных размеров | 1976 |
|
SU580441A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ РАЗЛИВКИ СТАЛИ | 1973 |
|
SU364387A1 |
| Дискретный электропривод | 1977 |
|
SU809055A1 |