Изобретение отнооится :К области а;втоматизащии процессов резаки металлов, в гчасгности 1К системам управления 1коорди«атной машиной для тер мичеокого раскроя листового металла.
|Из.ве:стны системы управления координатной машийой для термического раскроя листового .металла при помощи- 1группавого реза1ка, содержащие последовательно включенные устройства цифрового нрограммаого управления, блак преобразования кода программы IB фазовый задающий сигнал и следящее устройство для автоматической -ориентации rpyininoBoro резака относительно линии резания. У этих систем .сложное устройство nporpaiMiM-Horo управления и процесса програ.ммИ|рования, что обусловлено необходимостью дополнительной памяти текущего и упрежденного кадров программы для хранения числа, означающего требуемый угол разворота группового ре-зака.
Сложность и дороговизна .процесса програм1мирования .вызваны необходим-остью записи, на програ1М.моносителе дополнительной информации об угловом положении группового резака, что требует .большего мащинного В|ремени составления и контроля программы.
Цель И|3обретен«я - упростить устройство
програ.ММного управлеиия и про-цесс програм.мирования.
Достигается это тем, что блок преобразования кода в фазовый задающий сигнал в
предлагаемой системе состоит из источника опорного {Квадратурного напряжения, узла преобразования сигналов знаков запрогра-ммированных отрезков перемещения резака и опорного напряжения в сигналы восьми фазовых полуквадрантов, двух формирователей мо.делирующих напряжений, пропорци-ональных абсолютным значениям скоростей перемещения резака по коор.д:инатным осям X и Y плоскости резания, двух преобразователей кодов програ-ммы перемещений резака в аналоговые значения напряжений, соответствующих координатным осям, двух формирователей сигналов, соответствующих изменению -знаков разности моделирующих на1пряжений и напряжений, пропорциональных кодовым значениям пролраммы, а также разделенных на две равные группы восьми логических элементов, выполняющих функцию конъюнкторов, двух дизъюнкторов и узла
блокировки чередующихся импульсов. При этом входы формирователей моделирующих напряжений и преобразователей ко-дов запрограм мированных перемещений peaaiKa соответственно подключены .к выходам нсточни1ка
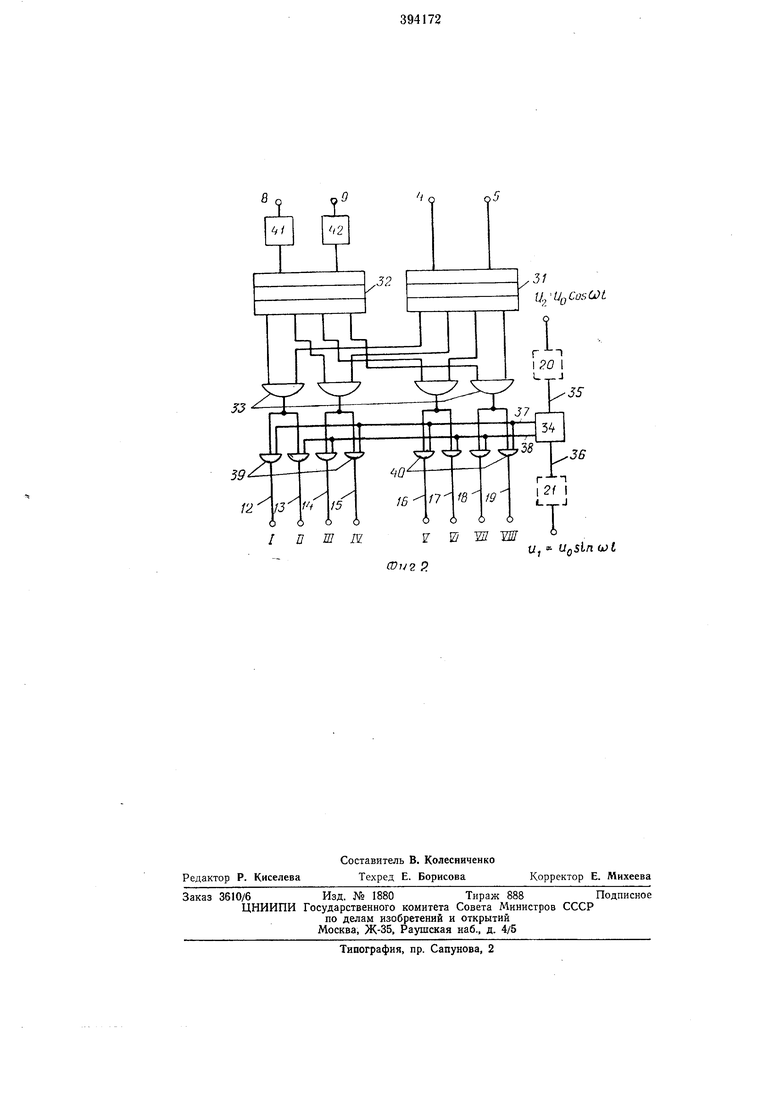
о.порного напряжения и устройства программного управления, а их выходы через формирователи сигналов, соответствующих из менению знаков разности моделирующих напряжений и на пряжений, лролорвдианальных кодовым значениям програ1М,мы, совместно с выхода:ми пoдiклюiчeннoгo ,к устройству програм1много управления и источнику отпорного «а1П|ряже«ия узла преобразования, соединены со входами конъюикторов, .выходы которых через дизъюнктивные логичеокне элементы подключены :ко входа|М узла блокировки чередующихся И1М1Пульсов, выход которого соединен со входо:М следящего устройства. Узел прео|бразова:ния си1гналов знаков запрогра ммированных отрезков иеремещеннй резака и опорного ывадратурного иалряжееия в сигналы 1вось,ми фазовых иолуквадрантов .может 1быть, например, (выполнен из двух дешифраторов, двух формирователей сигналов, одного 1кампаратора (моделирующих напряжений и двух трупн конъюнкторов, (При этом входы одного дешифратора -через формирователи сигналов надклю чены (к выходу источника опорного напрян ения, входы второго - к выходу устройства ,програ.м;много25 управления, а их выходы, объединенные с помощью входящих в 1пер1вую группу четырех конъюнкторов, включены совместно с выходом заиитанного от фор мирователей й-юделирующего напряжения (ко.мпаратора, на вхо-30 ды входящих во вторую группу восьми конъюнкторов, к выходам которых подключены выходные клеммы узла преобразова(ния. Та(кая структура олока преобразования ко- 35 да ,пролра:М1Мы в фазовый задающий сигнал для устройства управления 1положением груплово(го резака позволяет упростить устройство цифрового программного управления и сам процесс програм(мирования.40 На фнг. 1 приведена функциональная схема системы управления с раЗВер нутой структурной схемой блока преобразо1вания; на фиг. 2 - структурная схема входящего в блок преобразова(ния узла преобразования 45 снлналов знаков .за1нрограммированных отрезков перемещения резака и опорного напряжения в сигналы восьми фазовых полуквадрантов. Система управления состоит из последова- 50 тельно .включенных устройств программного у1пра1вления /, блока преобразования 2 и следящего устройства 3. Блок преобразования 2 И(меет знаковые входы, Образованные 4 и 5, кодовые 55 входы, о:бразо1ванные .цепями 6 и 7, а также входы S и 5 источника опорй-ого квадратурного напряжения. Выхо.дная цепь 10 связывает блок преобразования 2 со следящи.м устрой(ство.м 3. Блок преобразования 2 содержит узел // (Прео-бразования сигналов знаков -программируемых отрез1ков .перемещения по каждой из координатных осей и опо-рного квадратурного напряжения, .который имеет выходные пени 65 5 10 15 20 12-19, соответствующие восьми фазовым полуквадрантам (/-VIII). Бло1к преобразования 2 содержит также фор.мирователи напряжений 20 и 21, моделирующих абсолютные значения скоростей соответственно координатным ося.м и У машины;-преобразователи 22 и 23 кодов програ1М:мы перемещений резака в аналоговые значения напряжений; формирователи 24 и 25 сигналов об изменении знаков разности моделирующих напряжений и напряжений, пропорциональных :кодовы1м значения. соответ1ственно каждой из координатных осей; две группы логических элементов 26, 27, вы1ПОлняЮ|Щих функцию конъюн1кторов, два дизъюнктора 28, 29 и узел блокировки 30 чередующих импульсов. Узел преобразования 11 может быть вы:полнен из двух дешифраторов 31 и 32, к выходу которых подключена лруппа из четырех коньюнкторов 33. В этот узел введен также (Компаратор 34 -моделирующих напряжений, имеющий входные цепи 35, 36, подключенные к выходам формирователей ,моделирующих напряжений 20, 21, и выходные цепи 37, 38. Кроме этого, .в узел преобразования включеиа разделенная на две части вторая группа из восьми 1конъюнкторов 39 и 40, к входаьм которых подключены выходные цепи 37, 38 компаратора 34 и выходы первой прупны конъюнкторов 33. К выходным цепяМ 37 и 38 второй группы конъюнкторов подключены -выходные клем/мы узла преобразования //Входы дешифратора 32 подсоединены к входа1М 8 и 9 источника опорного напряжения при (ПОМОЩИ формирователей сигналов 41 и 42. Работа системы (фи1Г. 1) сводится к преобразованию программируемых кодовых значе(ний перемещения по каждой из координатных осей .машины и програМ:Мируемых сигналов зна(ков направления перемещения по каждой из указа( осей в фазовое положение импульса относительно .периода опорного на/пряжения, являющееся входным сигналом для следящей сИ)Стемы 3, управляющей угловым положением группового резака. Устройство nporpaiMMHoro управления / выполнено на основе цифрового линейного интерполятора, в котором програм1ма перемещения реза1ко.в в плоскости листа задается ко.дами координатных приращений. Выходные сигналы с этого устройства .поступают на входы блока преобразования 2 кода в фазовый задающий снгнал. Сигналы знаков подступают на блок преобразования 2 по .выходные .цепям 4 и 5, а кодовые абсолютные значения координатных .перемещений-по (выходным (цепям 6 и 7. iB качестве опорного напряжения И1опользо|Вана си(стема и, и, sin 0) f/, rz (Jo COS (iif
квадратурного напряжения. Первое из у-казанНых на1нряже«ий подведено ко входу 9, а второе - ко входу 8 блока преобразования 2.
В лреобразоваш1я 2 сигналы знаков совместно .с опорным на пряженпе м подаются иа входы узла треобразОВания 11, а кодовые абсолютные значения коордннатных перемещений - на входы -преобразователей (КОда в аналог 22, 23. Опорное квадратурное напряжение подается на входы формиро вателей напряжений 20, 21. На входы 8 9 узла преобразования 11 подаются соответственно .косинусоидальная и синусоидальная составляющие опорного напряжения. После инвертирования в фор мирователях 41 н 42 сигналы поступают на .вход дешифратора 32.
П|рн этом на выходах данного дешифратора существуют серии нмпульсов, которые являются сигналами |фазовых квадрантов опорного напряжения и повторяются с частотой данного напряжения.
На входы 4 и 5 дешифратора 3} подаются из устройства шрогра ммного управления 1 сигналы зна-ков направления перемещения по каждой из .координатных осей.
Выходы дешифраторов 31 и 32 с одноимен«ыми фазавы1ми н пространственными квадранта.ми конъюн1ктнвно объединены между собой посредством группы конъюн1кторов 33. На выходах конъювкторов существует сигнал толыко одного фазового .квадранта, соответствующего заданному нространственному ивааранту.
При помощи групп конъюН:КТоров 39 и 40 осуществляется операция лопичеакого умножения сигналов фазовых квадрантов с двумя инверонЫМИ Вспомогательны1мн сигналами, полученными из сра1внения моделирующих напряжений в «омпараторе 34. За счет данной операщии происходит разделение сигналов фазовых квадрантов на выделенные на выходах групп конъюнкторов 39, 40 сигналы восьми фазовых полуквадрантов.
Выделенные с выхода узла преобразования сигналы восьми фазовых лолуквадрантов подаются на входы конъюн1кторных групп 26 и 27, где происходит их логическое умножение с сигналами об изменении значков разности моделирующих напряжений и напряжений, пропорциональных кодовЫМ значениям программы, СНЯТЫЛ1И с выходов формирователей 24 и 25.
Сигналы с выходов конъюнкторов групп 26 и 27 поступают Соответственно на входы дизъюнкторов 28 и 29, где происходит их логическое сулгмирование.
С выходов дизъюн:кторов 28 и 29 сигналы поступают на входы узла -блокировали чередующихся импульсов, с выхода которого сни.мается фазовый задающий сигнал, управляющий следящи.м устройством 3 для автоматической ориентации группового резачка относительно линии резания.
Построенная таким образом систе:ма управления позволяет производить координатные н угловые перемещения резака при реЗКе листового металла с одновременным скосом кромок детали под CBapiKy, что повышает производительность .
Предмет и з о б р е т е н п я
1. Систе-ма управления координатной машиной для термического раскроя листового
Металла при помощи группового резака, содержащая последовательно-включенн з1е устройство цифрового программного управления, блок преобразования кода программы в фазовый задаюнцИЙ сигнал и следянгее устройство для автоматической ориентации группового резака относительно линии резания, отличающаяся тем, что, с целью упрощения устройства программного управления и процесса программирования, блок преобразования кода в фазовый задающий сигнал выполнен состоящим из источника опорного квадратурного напряжения, узла преобразования сигналов знаков запрограммированных отрезков перемещения резака и опорного напряжеПИЯ в сигналы восьми фазовых иолуквадрантов, двух формирователей моделирующих напряжеипй, пропорциональных абсолютныл значениям скоростей перемещения резака по координатным осям X и У плоскости резания,
двух преобразователей кодов программы перемещений резака в аналоговые значения напряжений, соответствующих координатным осям, двух формирователей сигналов, соответствующих изменению знаков разности моделируюишх напряжений п напряжений, пропорциональных КОДОВЫМ значениям программы, а также разделенных на две равные группы, восьми логическпх элементов, выполняющих фун:КЦИЮ КОНЪЮН КТОрОВ, ДВуХ
дизъюнкторов и узла блок1 ровки чередующихся импульсов, причем входы фор мирователей моделирующих напряжений и преобразователей кодов запрограммированных перемещений резака соответственно подключены
к выходам источника опорного напряжения и устройства программного управления, а их выходы через формирователи сигналов, соответствующих изменению знаков разности моделирующих напряжений и напряжений, пропорциональных кодовым значениям программы, совместно с выходами подключенного к устройству программного управления и источнику опорного напряжения, узла преобразования соединены со входами конъюнкторов,
выходы которых через дизъюн:ктивные логические элементы подключены ко входам узла блокировки чередующихся импульсов, выход которого сое.динен со входом следящего устpOf jCTBa.
2. Система по п. 1, отличающаяся тем, что узел преобразования сигналов знаков запрограммированных отрезков перемещения резака и оиор)юго квадратурного напряжения в сигналы восьми фазовых полуквадрантов выполнен из двух дешифраторов, двух формирователей сигналов, одного ком-паратора моделирующйх на дряжений и двух групл коиъю кторов, при это;м входы одного дешифратора через формирователи сигналав под ключены -к выходу сточНИ|Ка опорного наяряження, входы второго - iK выходу устройства програММного управления, а их выходы, объединенные
с помощью входящих щ |Пе;р|Вую группу четырех конъюнкторов, выключены совместно с выходом запнташного от формнр01вателей м-оделирующйх напря:же1ннй комюаратора, на входы ВХОДЯЩИХ во вторую групшу восьми 1конъюн кто;рав, к Выходам которых подключены выходные .клем.мы узла преобразования,

| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления устройством термической вырезки фланцев | 1983 |
|
SU1080937A1 |
| УСТРОЙСТВО для ФОТОСЛЕДЯЩЕГО КОПИРОВАНИЯ | 1973 |
|
SU394821A1 |
| КОРРЕЛЯЦИОННЫЙ ПРИЕМНИК ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2014 |
|
RU2548010C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ СТРУКТУРНЫХ ПОМЕХ | 2013 |
|
RU2534221C1 |
| Устройство для считывания графической информации | 1973 |
|
SU667976A1 |
| Преобразователь перемещения в код | 1987 |
|
SU1564726A1 |
| Устройство для коррекции неравномерности группового времени прохождения в каналах связи | 1987 |
|
SU1525921A1 |
| КОРРЕЛЯЦИОННЫЙ ПРИЕМНИК ШУМОПОДОБНЫХ СИГНАЛОВ | 2010 |
|
RU2431919C1 |
| УПРАВЛЯЮЩИЙ АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2001 |
|
RU2222028C2 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ ПРИЕМНИКА ШУМОПОДОБНЫХ СИГНАЛОВ С МИНИМАЛЬНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 2007 |
|
RU2357359C2 |

CDiJ2 .
