1
Изобретение относится к обда сти автоматического управления .электрическими машинами переменного тока при возмущениях в энергосис-теме о
Известен способ автоматического управления напряжениями на кольцах ротора синхронного генератора, имеющего на роторе, например, .две взаимно перпеняикулярные обмотки, огаа для повышения динамической ,, -устойчивости в момент аварии на обе -обмотки подаются максимально воз.можные (фороировочные или потояоч,ные) напряжения При этом обмотка в поперечной оси ротора (являющаяся в тепловом отношении более слабой, чем основная обмотка управления, которая расположена в продольной оси) в доаварийном режиме обесточена «
Этот способ, хотя и повышает .динамическую устойчивость, но не использует всех возможностей, свя1 ванных с наличием обмотки в поперечной оси, так как тормозной эффект форсировки здесь зависит от ИСХОДНОГО режима, и не всегда может бить .достигнута его максимальная велжчина.
Цель изобретения - повысить динамическую устойчивость машины.
Поставленная цель достигается тем, что в установившемся режиме
сравнивают угол положения ротора о за.данныМэ соответствущим наибольшему значению тормозного момента при аварии, и в зависимости от полученной разности формируют управяяющие сигналы, подаваемые в обмотки ротора.
Поэтому составяящая магнитного потока машины, вызванная форсировкойр имеет такое прострайственное положение относительно вектора напряжения системы, что обеспечивает наилучшее тормозное действие.
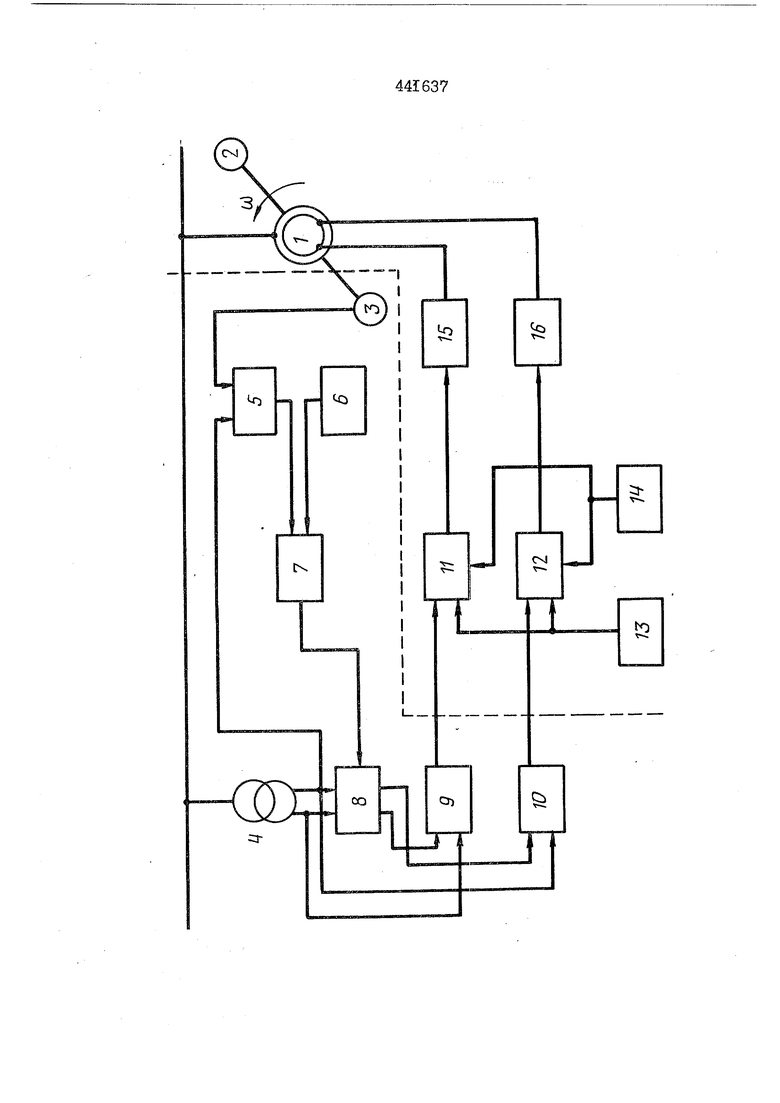
На чертеже приведена блок-схема для реализащш предлагаемого
I способа е Она содержит машину I переменного тока о .двумя (и более) взаимно перпендикудярными обмотками на роторе; турбину 2; углоизмерительную машину 3 для получения информации об изменении углового положения ротора относительно статора; измерительный трансформатор 4 для информации о погожении вектора напряжения сети; блок 5 для измерения углового положения ротора относительно вектора напряжения сети; блок 6 ДЛЯ задания определенного угла положения ротора и формирование сигналов управления по осям я/ и (Ь в рассчитанной пропорции;блок 7, подающий коман.ду на изменение положения фазорегуляторов в том случае, когда сигналы от блоков 5 и 6 не равны .друг .другу; фазорегулятор 8 для изменения фазы напряжения, снимаемого с трансформатора напряжения; блоки 9-10 для формирования за.данных величин напряжений соответственно в осях « и ; блоки 11-12 коммутации для переключения сигналов управления с нормального реж1тма на аварийную форсиров ку соответственно в осях с и cj ; за.цатчик 13 форсировочных напряжеНИИ; блок 14 фиксации-аварии;.усилители 15,16 мощЕюсти в осях й и fl соответственно. В нормальном режиме на выходе блока 14 сигнал отсутствует, и блоки 11,12 находятся в таком положении, что на блоки 15,16,а, следовательно, и на обмотки ротора подаются сигналы управления нормального режима с блоков 9ДО. Установки блока 6 (величины сигналов, задаваемых этим блоком) опредетшются на основании расчетов, провод мых для каждой конкретной энергосистемы в зависимости от мак симально допустимого времени аварии. Сигнал, поступающий с блока 6, соответствует оптимальрюму положению обмоток ротора относительно вектора напряжения сети. Всякое изменение положения ро тора в нормальном режиме измеряется углоизмерительной машиной 3, сигнал от которой поступает на блок 5. В результате этого на блоке 5 появляется сигнал, отличныйот сигнала, действующего на выхо.де блока-за.датчика 6, Разность этих сигналов фиксируется блоком 7 сравнения, на выходе которого в этом случае появляется сигнал-коман.да на изменение положения фазорегулятора 8, При изменении положения фазорегулятора 8 изменяется соотношение сигналов на выхо.же блоков 9-16 и соответственно на обмотках ротора. Это заставляет ротор также изменять свое положение. Изменение положений фазорегулятора и соответственно ротора про.должается до тех пор, пока сигналы на выхо.де блоков 5,6 не выравниваются, после чего система прихо.дит к новому установившемуся состоянию, В таком положении система регулирования как бы ж.дет начала аварии, В момент аварии на блоке 14 появляется сигнал, позволяющий изменить состояние блоков 11,12 так, что вместо нормального режима с блоков 9,10 на выхо.де блоков 11,12 появляются форсировочные сигналы, поступающие с блока 13, которые через блоки осуществляют .действие аварийной форсировки: о.дновременную по.дачу форсировочных напря- женш на обе обмотки ротора, что в сочетании с описанной выше по.дготовкой системы регулирования в нормальном режиме обеспечивает максимальный тормозной эффект. Такрш образом, предлагаемый способ всег.да позволяет обеспечить максимальный тормозной эффект фюрсировки независимо от исхо.дного установившегося режима. ПРЕД1ЖГ ИЗОБРЕТЕНИЯ Способ автоматического управления напряжениями на кольцах ротора электрической машины переменного тока, по крайней мере, с .двумя обмотками на роторе путем одновременной по.дачи в аварийном режиме фюрсировочных напряжений в обмотки ротора, отличающийся тем, что, с целью повышения динамической устойчивости, в установившемся режиме сравнивают угол полоS6
Кения ротора о заданным, соответст- симости от подученной разности форв ющим наибольшему значению тормоз- мируют управляющие сигналы, подаваного |яомента при аварии, и в емые в обмотки ротора.
441637