Изобретение относится к промыс- ловой геофизике и может быть использовано для определения угла азимута в системах контроля искрив ления скважины при бурении.
Известны приборы для определения угла азимута скважины, содержащие корпус, следящую систему и систему феррозондов.
Однако известные приборы недостаточно работоспособны при использовании их в качестве погружных, входящих в состав бурового снарядз.
Предлагаемый прибор отличается от известных тем, что следящая система выполнена в виде установленного с зазором в корпусе поплавка с укрепленными на нем ротора сельсина-приемника .двигателя .датчика угла азимута,уравновешенного в жидкости, заполняющей корпус, по плавучести, дифференту, закручивающему моменту балансиро-.
1ВОЧНЫМИ грузами. Это позволяет повысить работоспособность при вибрационных и ударных нахфузках, возникающих в процессе бурения.
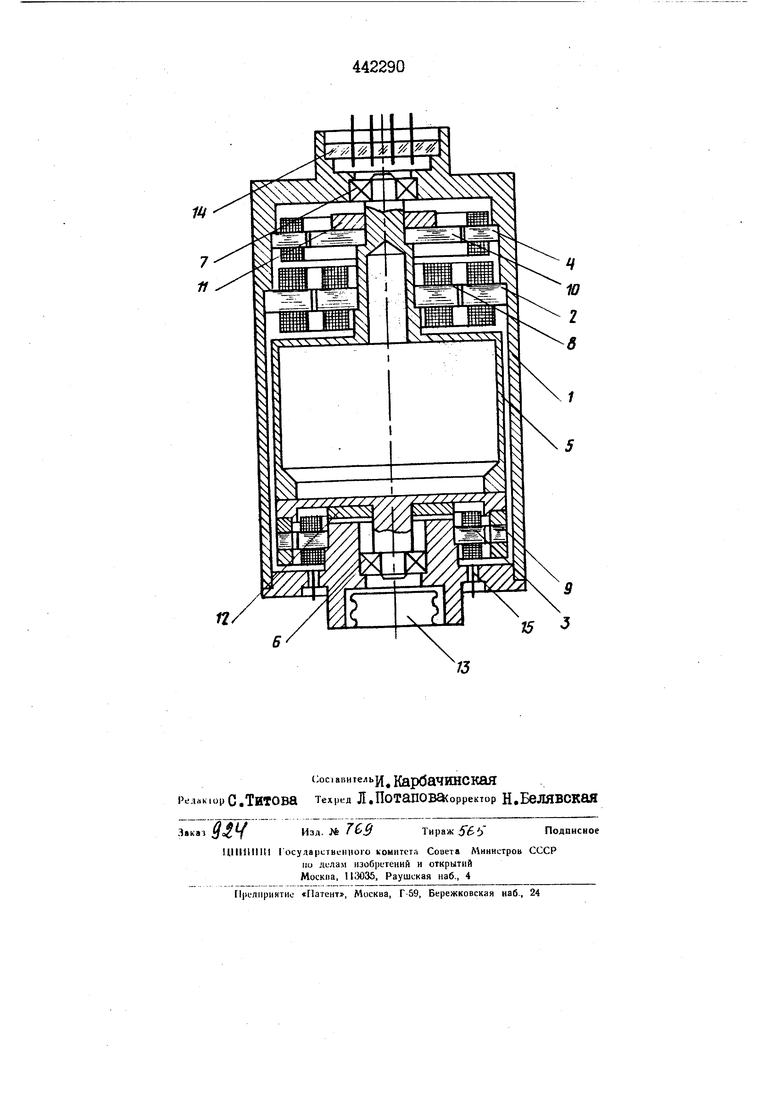
На чертеже изображена схема предлагаемого прибора.
Система феррозондов связана диа танционной передачей с поплавковой следящей системой, состоящей из
герметического корпуса I, заполненного жидкостью с высоким удельным весом. Внутри корпуса смонтированы статоры 2 бесконтактных сельсина-приемника, коррекционного двигателя 3, датчика 4 угла азимута скважины. К поплавку 5, центрируемому в корпусе прибора опорами 6 и 7, крепятся роторы 8 с ельсина-приемника, коррекционного двигателя 9, датчика угла азимута 10. Поплавок окончательно уравновешен в жидкости по плавучести, дифференту, закручивающему моменту с помощью балансщ)ово4ных
грузов II и 12. Сильфон 13 предназначен для компенсации изменения объема жидкости при изменении окружающей температуры. Соединительные провода вводятся в корпус через гермовыводы 14 и 15.
Объем поплавка и удельный вес жидкости выбираются таким образом, что сила веса поплавка со всеми закрепленными на нем элементами уравновешивается выталкивающей архимедовой силой, благодаря чему практически полностью разгружаются опоры подвесов.
Зазор мезйду корпусом и поплавком, а также вязкость жидкости выбираются с учетом демпфирования колебаний следящей системы и подав ления помех, вызванных пространственным колебанием стабилизированной в горизонте площадки с феррозондами из-за вибрации бурового сна1рдца.
Прибор работает следующим образом.
Система феррозондов установлена на стабилизированной маятником в горизонте площадке, фиксированной относительно немагнитной части колонны бурильных труб. Вторичные обмотки зондов соединены со статорной обмоткой сельсина-приемника 2 и образуют дистанционную передачу. Фазовые напряжения феррозондов создают в сельсине результирующий поток удвоенной частоты, направление которого совпадает с направлением магнитного меридиана, С ротора сельсина-приемника 8 снимается напряжение, проиорциональное углу рассогласования мензду магнитным меридианом и направлением, перпендик/лярным оси полюсов ротора сельсина, которое усиливается, цреобразуется избирательным усилителем и подается В обмотки статора коррекционного двигателя 9, создакнцего момент такой полярности, что поплавок 5 с укрепленными на нем poтopa ш сельсина-прип емника и датчика угла азимута 10 возвращается в положение нулевой э.д.с.. Это угловое положение поплавка соответствует направлению, перпендикулярному магнитному ме1зидиащг. Электрический сигнал,сни1 маемый с датчика угла, пропорционален азимутальному углу отклонения скващш от магнитного меридиана.
ПРЩМЕТ ИЗОБРЕТЕНИЯ
Прибор для определения угла ази мута скважины, содержащий корпус, следящую систему и систему феррозондов, отличащийся тем, что, с целью повышения работоспособности при вибрационных и ударных перегрузках, следящая система выполнена в виде установленного с зазором в корпусе поплавка с укрепленными яа нем роторами сельсина-приемни- , ка, двигателя и датчика угла азимута, уравновещенного в жидкости, заполняющей корпус по плавучести, дифференту, закручивающему моменту балансировочными грузами.:
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения азимута буровой скважины | 1978 |
|
SU740942A1 |
| Автономный одноточечный инклинометр | 1988 |
|
SU1564331A1 |
| Магнитный компас с дистанционной передачей показаний | 1978 |
|
SU679796A1 |
| Устройство для определения ориентации прибора в скважине | 1980 |
|
SU883372A1 |
| Преобразователь зенитного угла | 1982 |
|
SU1027379A1 |
| Феррозондовый датчик азимута | 1979 |
|
SU802535A1 |
| МАССОВЫЙ РАСХОДОМЕР | 1973 |
|
SU372451A1 |
| Устройство для измерения азимута скважины | 1976 |
|
SU709805A1 |
| Устройство для ориентации сейсмоприемников в скважинах | 1982 |
|
SU1124236A1 |
| Устройство для измерения магнитного курса | 1978 |
|
SU769329A1 |