1
Изобретение относится к области автоматизации производственных процессов, а именно сборочньк операций.
Известны устройства для сборки деталей типа вал- втулка, снабженные загрузочным механизмом и плавающей платформой для установки одной из собираемых деталей.
Предлагаемое устройство отличается от известных тем, что, с целью упрощения настройки на различные характеристики поискового . движения платформы оно снабжено кардановым подвеском с наружным приводным кольцом, а внутреннее кольцо подвеса связано с осью, несущей на верхнем конце платформу, а на нижнем - рамку с шарнирно закрепленным быстровращающимся ротором.
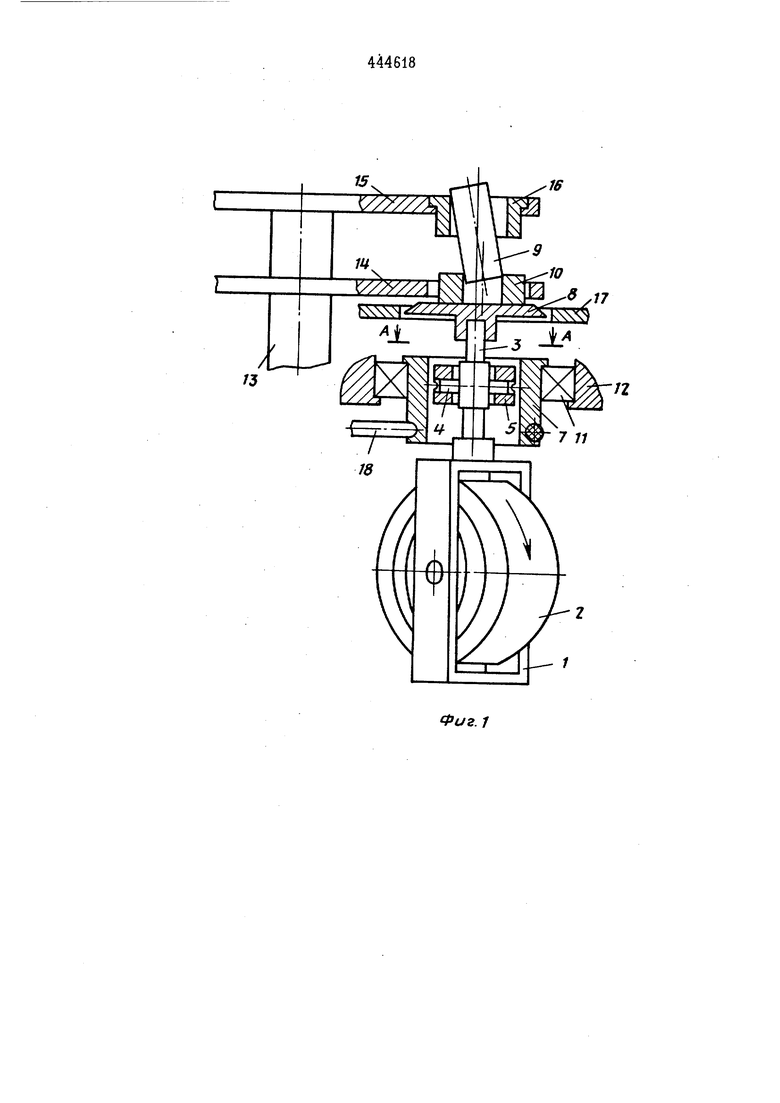
На фиг. I представлено предлагаемое устройство, продольный разрез ; на фиг. 2 - разрез по А-А на фиг. I.
Устройство содержит рамку 1, в которую на горизонтальной оси посажен вращающийся ротор 2. Рамка I укреплена на нижнем конце стержня 3, установленного на кардановом подвесе. Карданов подвес включает ось 4д посредством которой стержень 3 подвижно соединен с другой деталью карданова подвеса - внутренним кольцом 5. Кроме того, карданов подвес включает ось 6 (см. фиг. 2) и наружное кольцо 7, которое при помощи этой оси подвижно соединено с внутренним кольцом 5.
Таким образом, рабочий орган (стержень 3 и связанные с ним элементы) имеют три степени свободы, так как он может вращаться относительно трех взаимно перпендикулярных осей: оси 4, оси 6 и оси стержня 3. На верхнем конце стержня 3 жестко укреплена платформа 8, на которую подается собираемая с валом у втулка 10. Карданов подвес
вместе с подшипником II посажен в
орпусе Id устройства. Для подачи обираемых деталей устройство меет механизм, содержащий вал Id, на котором расположен нижний диск 14 (для подачи втулок 10) и верхний диск 15 (для подачи валов 9). . ля ограничения смещений сопрягае- ых валов диск 15 оснащен направляющей втулкой 16. Для поддержания втулок во время подачи их на ; платформу устройство включает направляющую плоскость 17, имеющую окно для размещения платформы 8, причем между платформой и направляющей плоскостью имеется некоторый зазор, позволяющий рабочему органу устройства поворачиваться относительно осей 4 и 6. Вал 13 может вращаться непрерывно или периодически.
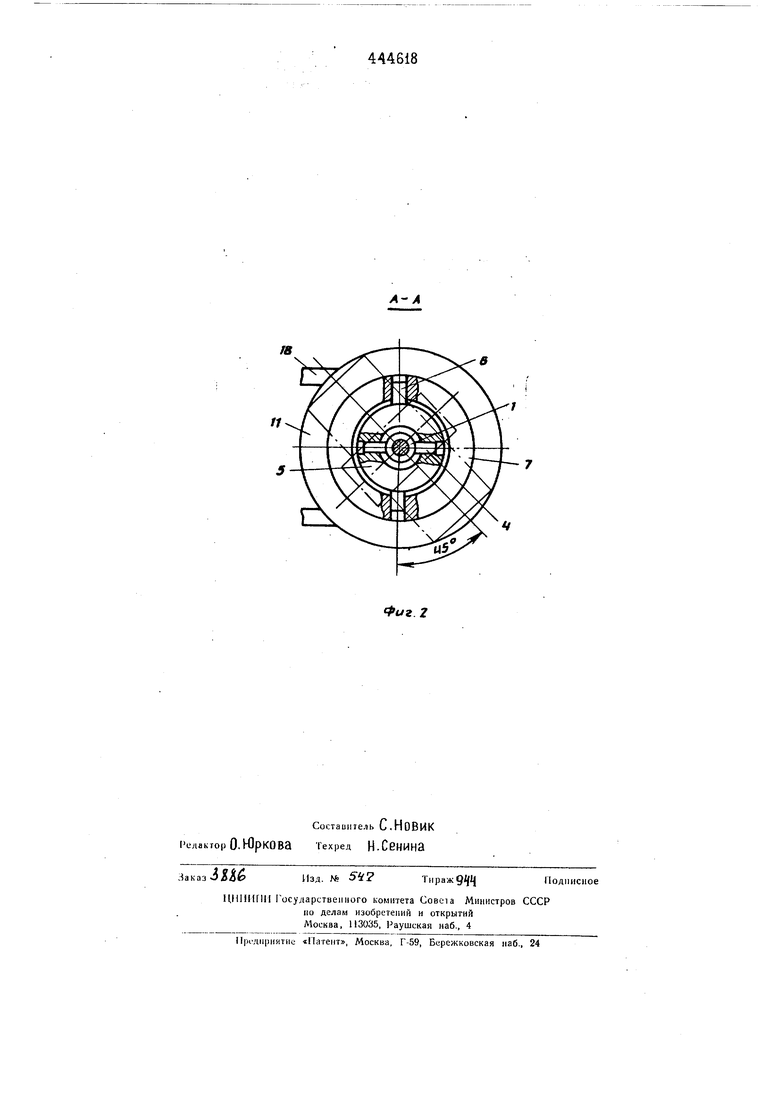
Наружное кольцо 7 мо;кет также получать непрерывное или периодическое вращение через ремень 18. Плоскость ротора расположена под углом 45 к осям 4 и б (см.
Ф иг. 2).
Устройство для сборки деталей работает следующим образом. Ротор
2имеет постоянное вращение (по стрелке). Через ремень 18 враще- . ние передается также на кольцо 7, что приводит к возникновению гироскопического момента в плоскости, перпендикулярной к оси вращения ротора 2, стремящегося повернуть стержень 3 и в этой плоскости. Однако, вследствие того, что плоскость действия момента составляет угол 45 с осью стержня 3 и осью
6, суммарный поворот рабочего органа устройства под действием гироскопического момента состоит из поворота относительно оси стержня
3и поворота относительно оси б. Гироскопическому моменту противодействует момент силы веса рабо- i чего органа, который увеличивается по мере возрастания угла отклонения его от вертикали. При некото ром угле гироскопический момент уравновешивается моментом силы веса рабочего органа. Угол отклонения стержня 3 от вертикали за- .
ВИСИТ от угловой скорости, сообщаемой рабочему органу через ремень 18. Таким образом стержень 3 совершает сложное движение под действием вращения привода и гироскопического момента, вызванного этим вращением. В результате платформа 8 совершает движение поиска. Угловыми отклонениями стержня 3 от вертикали можно управлять изменением лишь одной величины - угловой скорости вращения наружного кольца 7.
При повороте вала 13 диск 14 захватывает собираемую втулку 10 и подает ее на платформу 3 которая сообщает втулке поисковое движение.
Затем через направляющую втул ку 16 подают собираемый вал до соприкосновения с торцом втулки 10, Вследствие поискового движения, совершаемого втулкой, вал захватывает своим нижним концом отверстие втулки и перемещает ее в направлении устранения взаимного перекоса осей. Этим обеспечивается сборка валика со втулкой под действием собственного веса валика. При следующем повороте дисков 14 и 15 собранный узел удаляется со сборочной позиции на разгрузку, а на сборочную позицию подаются новые детали. Процесс повторяется.
ПРЕДМЕТ ИЗОБРЕТЕНИЯ Устройство для сборки деталей типа вал-втулка, снабженное загрузочным механизмом и плава ощей плат формой для установки одной из соби раемых деталей, отличающееся тем, что, с целью упрощения настройки на различные характеристики поискового движения платформы, оно снабжено кардановым подвесом с наружным приводным кольцом, а внутреннее кольцо подвеса связано с осью, несущей на верхнем конце платформу, а на нижнвм-рамку с шарнирно закрепленным быстровращающимся ротором.
/3
W
Фиг. 1
Фиг. 2