1
Изобретение относится к технологической оснастке сборочных операций и может найти применение в различных отраслях техники, например приборостроении, электротехнике, машиностроении и др.
Известны устройства для сборки деталей, снабженные загрузочным механизмом и плавающей платформой.
Цель изобретения - повышение быстродействия и расширения технологических возможностей устройства.
Для этого предлагаемое устройство снабжено двустепеиным гироскопом, выполненным в виде несуш,его платформу диска, приводимого во враш,ение от двигателя и шарнирно связанного с осью последнего быстровращающегося ротора, катящегося по диску.
Платформа может быть смонтирована на диске в подшипнике качения, а на быстровращающемся роторе может быть укреплен дебалансный груз.
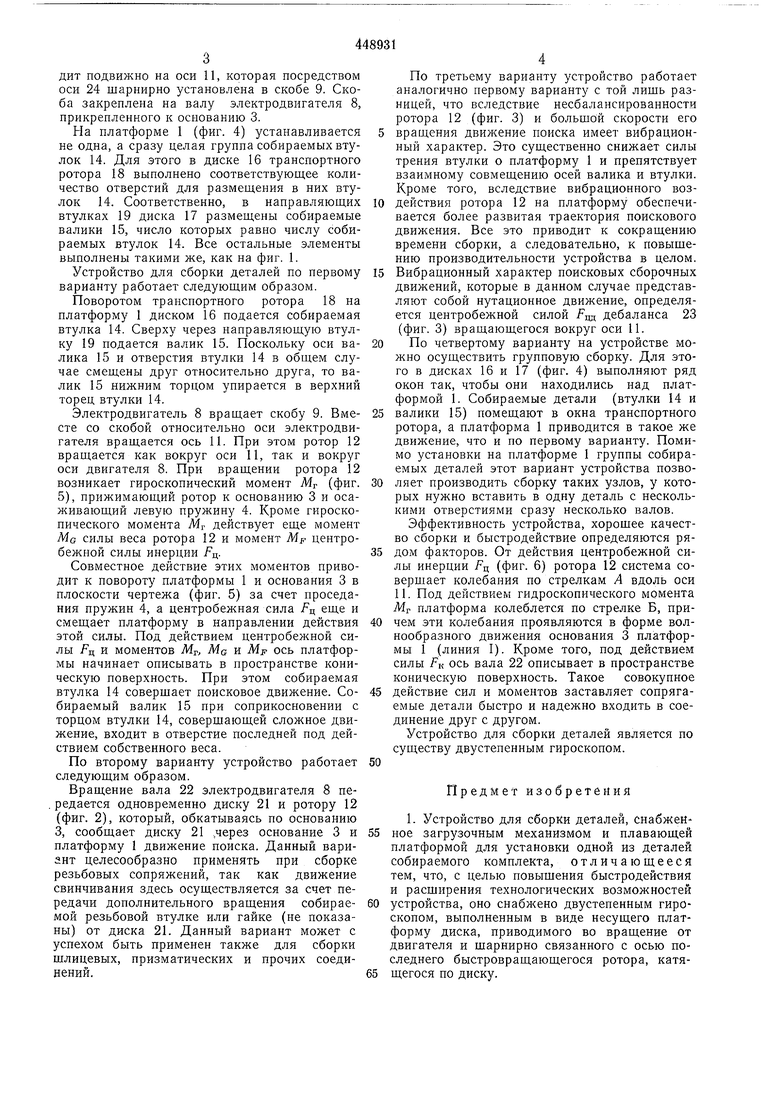
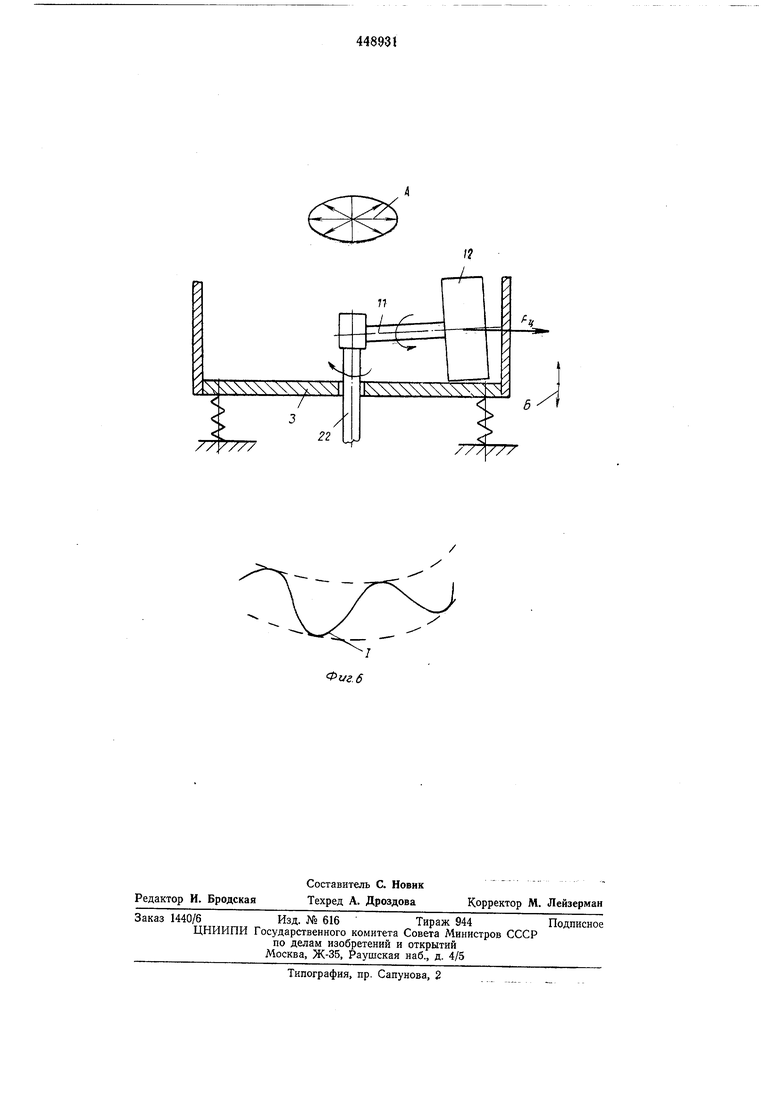
На фиг. 1 изображено предлагаемое устройство, продольный разрез; на фиг. 2-4 - варианты выполнения устройства; на фиг. 5 - схема действия сил и моментов на элементы устройства; на фиг. 6 -схема поисковых движений, совершаемых платформой устройства.
Устройство (фиг. 1) состоит из платформы 1, которая стойками 2 крепится к дискообразному основанию 3. Последнее посредством
пружин 4 опирается на резиновые втулки 5, установленные в опоре 6. В отверстия втулок 5 пропущены штыри 7, укрепленные к основанию 3. К нему крепится также двигатель 8, на валу которого установлен скоба 9. На ней шарнирно на оси 10 сидит радиально размешенная относительно основания 3 ось 11, на которой свободно посажен ротор 12.
Штыри 7 служат для придания большей устойчивости основанию 3 с двигателем 8. Заподлицо с верхней плоскостью платформы 1 установлена опорная плоскость 13 для загрузки деталей и разгрузки собранного узла. Собираемые детали - втулка 14 и валик 15 находятся в гнездах дисков 16 и 17 транспортного ротора 18. Для ограничения смещений валика 15 диск 17 снабжен направляющей втулкой 19.
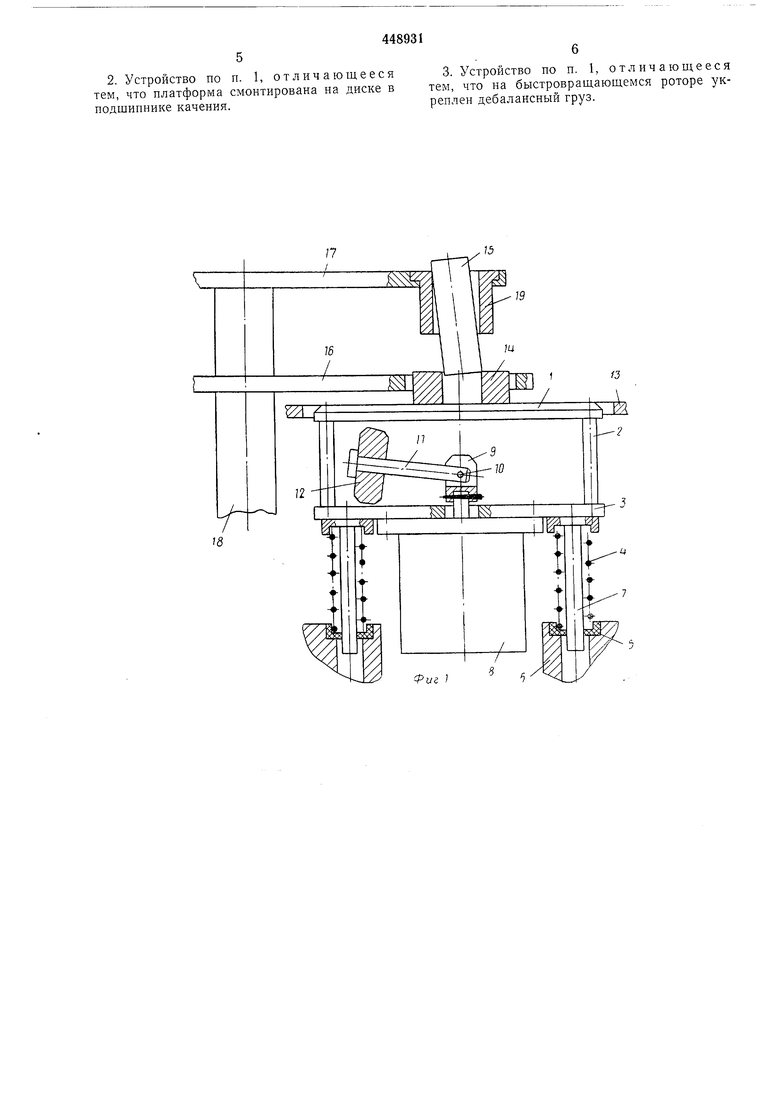
На платформе 1 через подшипник 20 (фиг. 2) установлен диск 21. Диск посредством вала 22 приводится во вращение электродвигателем 8. Одновременно через скобу 9 вал 22 может вращать ось II, на которой посажен ротор 12. Скоба 9 шарнирно крепится к валу 22 осью 13.
Все остальные элементы устройства на фиг. 2 те же, что и на фиг. 1 и имеют то же назначение.
На роторе 12 (фиг. 3) укреплен дебалансный груз 23. Ротор 12, как и на фиг. 2, си
дит подвижно на оси 11, которая посредством оси 24 шарнирно установлена в скобе 9. Скоба закреплена на валу электродвигателя 8, прикрепленного к основанию 3.
На платформе 1 (фиг. 4) устанавливается не одна, а сразу целая группа собираемых втулок 14. Для этого в диске 16 транспортного ротора 18 выполнено соответствующее количество отверстий для размещения в них втулок 14. Соответственно, в направляющих втулках 19 диска 17 размещены собираемые валики 15, число которых равно числу собираемых втулок 14. Все остальные элементы выполнены такими же, как на фиг. 1.
Устройство для сборки деталей по первому варианту работает следующим образом.
Поворотом транснортного ротора 18 на платформу 1 диском 16 подается собираемая втулка 14. Сверху через направляющую втулку 19 подается валик 15. Поскольку оси валика 15 и отверстия втулки 14 в общем случае смещены друг относительно друга, то валик 15 нижним торцом упирается в верхний торец втулки 14.
Электродвигатель 8 вращает скобу 9. Вместе со скобой относительно оси электродвигателя вращается ось 11. При этом ротор 12 вращается как вокруг оси 11, так и вокруг оси двигателя 8. При вращении ротора 12 возникает гироскопический момент Мг (фиг. 5), прижимающий ротор к основанию 3 и осаживающий левую пружину 4. Кроме гироскопического момента Мг действует еще момент MG силы веса ротора 12 и момент Мр центробежной силы инерции ц.
Совместное действие этих моментов приводит к повороту платформы 1 и основания 3 в плоскости чертежа (фиг. 5) за счет проседания пружин 4, а центробежная сила Рц еще и смещает платформу в направлении действия этой силы. Под действием центробежной силы Рц и моментов Мр, MG и Мр ось платформы начинает описывать в пространстве коническую поверхность. При этом собираемая втулка 14 соверщает поисковое движение. Собираемый валик 15 нри соприкосновении с торцом втулки 14, совершающей сложное движение, входит в отверстие последней под действием собственного веса.
По второму варианту устройство работает следующим образом.
Вращение вала 22 электродвигателя 8 пеедается одновременно диску 21 и ротору 12 (фиг. 2), который, обкатываясь по основанию 3, сообщает диску 21 лерез основание 3 и латформу 1 движение поиска. Данный варинт целесообразно применять при сборке езьбовых сопряжений, так как движение винчивания здесь осуществляется за счет пеедачи дополнительного вращения собираеой резьбовой втулке или гайке (не показаы) от диска 21. Данный вариант может с спехом быть применен также для сборки лицевых, призматических и прочих соедиений.
По третьему варианту устройство работает аналогично первому варианту с той лищь разницей, что вследствие несбалансированности ротора 12 (фиг. 3) и больщой скорости его 5 вращения движение поиска имеет вибрационный характер. Это существенно снижает силы трения втулки о платформу 1 и препятствует взаимному совмещению осей валика и втулки. Кроме того, вследствие вибрационного воздействия ротора 12 на платформу обеспечивается более развитая траектория поискового движения. Все это приводит к сокращению времени сборки, а следовательно, к повышению производительности устройства в целом.
15 Вибрационный характер поисковых сборочных движений, которые в данном случае представляют собой нутационное движение, определяется центробежной силой цд дебаланса 23 (фиг. 3) вращающегося вокруг оси 11.
0 По четвертому варианту на устройстве можно осуществить групповую сборку. Для этого в дисках 16 и 17 (фиг. 4) выполняют ряд окон так, чтобы они находились над платформой 1. Собираемые детали (втулки 14 и
25 валики 15) помещают в окна транспортного ротора, а платформа 1 приводится в такое же движение, что и по первому варианту. Помимо установки на платформе 1 группы собираемых деталей этот вариант устройства позволяет производить сборку таких узлов, у которых нужно вставить в одну деталь с несколькими отверстиями сразу несколько валов.
Эффективность устройства, хорошее качество сборки и быстродействие определяются рядом факторов. От действия центробежной силы инерции Рц (фиг. 6) ротора 12 система совершает колебания по стрелкам А вдоль оси 11. Под действием гидроскопического момента MF платформа колеблется по стрелке Б, причем эти колебания проявляются в форме волнообразного движения основания 3 платформы 1 (линия I). Кроме того, под действием силы к ось вала 22 описывает в пространстве коническую поверхность. Такое совокупное
5 действие сил н моментов заставляет сопрягаемые детали быстро и надежно входить в соединение друг с другом.
Устройство для сборки деталей является по существу двустепенным гироскопом.
Предмет изобретения
1. Устройство для сборки деталей, снабжен5 ное загрузочным механизмом и плавающей платформой для установки одной из деталей собираемого комплекта, отличающееся тем, что, с целью повышения быстродействия и расширения технологических возможностей 0 устройства, оно снабжено двустепенным гироскопом, выполненным в виде несущего платформу диска, приводимого во вращение от двигателя и шарнирно связанного с осью последнего быстровращающегося ротора, катящегося по диску.
2. Устройство по п. 1, отличающееся тем, что платформа смонтирована на диске в подшипнике качения.
3. Устройство по п. 1, отличающееся тем, что на быстровращающемся роторе укреплен дебалансный груз.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки деталей | 1973 |
|
SU444618A1 |
| Устройство для сборки деталей типа вал-втулка | 1977 |
|
SU659350A1 |
| УСТРОЙСТВО для СБОРКИ ДЕТАЛЕЙ | 1966 |
|
SU178754A1 |
| Сканирующий сборочный механизм | 1977 |
|
SU663551A1 |
| ВИБРАЦИОННАЯ УСТАНОВКА С ИНЕРЦИОННЫМ ВИБРАТОРОМ | 1967 |
|
SU205643A1 |
| СПОСОБ РАБОТЫ СИЛОВОГО ПРИВОДА ВРАЩЕНИЯ И ЭЛЕКТРОСТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2377458C2 |
| Автомат для сборки деталей | 1979 |
|
SU831490A1 |
| ЦЕНТРОБЕЖНЫЙ ПРЕСС-МАХОВИК (ВАРИАНТЫ) | 2021 |
|
RU2779735C2 |
| УСТРОЙСТВО ДЛЯ ПРОМЫВКИ И СУШКИ ДЕТАЛЕЙ | 1971 |
|
SU428793A1 |
| Вибрационный станок | 1987 |
|
SU1458181A1 |

/7
6
71 9
20
18
Ш
л
//
16
13
т.
/
/
ф-иг.Ц.
иг. 5
:
/777
77
