Предлагаемое изобретение относится к устройствам с изменяющейся ориентацией диаграммы направленности волн, излучаемых антенной, при неподвижном активном элементе (облучателе) и при подвижном отражающем устройстве (зеркале), а именно к поворотно-чувствительным устройствам, основанным на использовании гироскопического эффекта.
Изобретение предназначено для формирования сигналов стабилизации и управления направлением зеркала антенного устройства на объект визирования (ОВ) с одновременным формированием сигналов торможения вращения по крену подвижного носителя антенного устройства и может быть использовано в антенных устройствах, содержащих двухосный карданов подвес зеркала, в системах инерциального измерения параметров вектора визирования, в системах пеленгации и автоматического сопровождения ОВ, которые являются одними из основных составных частей интегрированной комплексированной бортовой системы самонаведения (БССН) подвижных носителей с высокоточным самонаведением, вращающихся по крену.
При создании высокоточных подвижных носителей важной задачей является обеспечение качественной стабилизации и управления направлением зеркала антенного устройства на ОВ, основание которого жестко закреплено внутри корпуса вращающегося по крену подвижного носителя, и обеспечение высокоточного самонаведения вращающегося по крену подвижного носителя на ОВ.
Известны различные способы стабилизации направления зеркала антенного устройства, такие как (см., например, В.А.Бесекерский, Е.А.Фабрикант. Динамический синтез систем гироскопической стабилизации. Л.: Судостроение, 1968 г., с.105-348; Г.О.Фридлендер, М.С.Козлов. Авиационные гироскопические приборы. М.: Оборонгиз, 1961 г., с.305-334; В.П.Селезнев. Навигационные устройства. М.: Машиностроение, 1974 г., с.465, 466, 482):
- способ силовой гироскопической стабилизации, при котором момент гироскопической реакции непосредственно воздействует на стабилизируемую платформу, установленную на качающемся основании;
- способ косвенной гироскопической стабилизации, при котором стабилизирующие моменты создаются только исполнительными двигателями или другими исполнительными устройствами, а моменты гироскопической реакции гироскопов не используются для непосредственной компенсации внешних моментов, возмущающих платформу; причем гироскопические приборы при этом способе гиростабилизации используются лишь для выявления отклонения платформы от заданного положения и для формирования управляющих сигналов;
- способы многоступенчатой гироскопической стабилизации, среди которых практическое значение имеют способы двухступенчатой гироскопической стабилизации, при которых стабилизируемая платформа является элементом первой ступени стабилизации, при этом на ней дополнительно устанавливают в отдельном кардановом подвесе вторую ступень стабилизации (платформу), возмущаемую ошибками стабилизации («ошибками качки») первой платформы, причем вторая платформа при этом способе стабилизируется в пространстве с более высокой точностью, чем первая.
Однако упомянутые способы обладают тем существенным недостатком, что не могут обеспечить высокоточную гиростабилизацию и управление направлением зеркала антенного устройства на ОВ, основание которого установлено жестко внутри корпуса подвижного носителя и вращается вместе с ним по крену относительно продольной оси симметрии, ортогональной к плоскости основания антенного устройства, так как эти способы предназначены для гиростабилизации платформ, установленных на качающемся (колеблющемся) подвижном носителе, и не могут быть реализованы внутри корпуса вращающегося по крену подвижного носителя.
Известна также «Система стабилизации линии визирования» (патент RU №2104578 С1, 1996.03.06), содержащая установленный в корпусе двухосный карданов подвес, на внутренней и наружной рамках которого жестко закреплены соответственно первый и второй зеркальные отражатели. При этом первый роторный вибрационный гироскоп (РВГ) как датчик угловой скорости (ДУС) закреплен на внутренней рамке двухосного карданова подвеса, а второй РВГ как ДУС закреплен на наружной рамке карданова подвеса. Первый и второй двигатели стабилизации установлены соответственно по наружной и по внутренней осям карданова подвеса.
Использование перечисленных элементов данной системы «позволяет расширить обзор внутренней оси подвеса, обеспечить работоспособность устройства при больших углах поворота внутренней рамки относительно наружной рамки в диапазоне ±90 градусов и уменьшить массогабаритные характеристики всего устройства».
Однако данная система обладает тем недостатком, что не обеспечивает гиростабилизацию направления оптического луча двухзеркальной системы при круговом вращении по крену корпуса относительно оси, ортогональной к оси вращения наружной рамки и к оси вращения внутренней рамки двухосного карданова подвеса оптической системы, и при одновременных колебаниях корпуса по тангажу и по рысканию относительно центра масс корпуса.
Из известных аналогов наиболее близким по технической сущности и назначению является «Способ стабилизации по крену инерциальной платформы для быстровращающихся объектов и стабилизированная по крену инерциальная платформа» (патент RU №2256882 С2, 2003.02.28).
В этом патенте предлагается стабилизация инерциальной платформы только по крену при установке ее внутри корпуса быстровращающегося объекта путем использования одноосного карданова подвеса без ограничения поворота, состоящего «из стабилизируемой платформы, на которой установлены измерители линейного ускорения и измерители угловой скорости». При этом «техническим результатом данного изобретения является повышение точности приведения (разворота) стабилизированной по крену корректируемой инерциальной системы за счет исключения погрешностей, пропорциональных g и g2, и обеспечение режима коррекции и расширения диапазона измерения угловых скоростей и линейных ускорений».
Однако предложенные в этом патенте способ и стабилизированная по крену инерциальная платформа не обеспечивают одновременно с вращением по крену объекта стабилизацию платформы и от колебаний объекта по тангажу и рысканию, а также не обеспечивают формирование сигналов стабилизации ее положения в задаваемом направлении с одновременным формированием сигналов торможения вращения быстровращающихся по крену управляемых объектов с высокоточным самонаведением на ОВ, что является существенными недостатками предложенных в данном патенте технических решений. Следовательно, эти решения не отвечают современным повышенным требованиям к формированию сигналов стабилизации направления зеркала антенного устройства на ОВ с одновременным формированием сигналов торможения вращения по крену подвижных носителей с высокоточным самонаведением на ОВ.
Целью заявляемых технических решений (способа и системы для его осуществления) является при круговом вращении основания антенного устройства, установленного жестко внутри вращающегося по крену подвижного носителя, обеспечение стабилизации направления зеркала антенного устройства на ОВ с одновременным торможением вращения по крену подвижного носителя, стабилизации направления зеркала антенного устройства на ОВ при наличии колебаний подвижного носителя антенного устройства по тангажу и по рысканию, определением угловой скорости вращения по крену подвижного носителя, текущего направления зеркала антенного устройства на ОВ по углу наклона и по азимуту относительно основания антенного устройства, текущего значения углов визирования ОВ в горизонтальной и в вертикальной плоскостях.
Сущность изобретения заключается в том, что по предлагаемому способу при круговом вращении основания антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя, относительно оси симметрии, ортогональной к плоскости основания антенного устройства, в цифровом вычислительном устройстве по сигналам, например, системы радиолокационного сопровождения ОВ и/или по сигналам инерциального измерителя параметров вектора визирования точки прицеливания, являющихся внешними по отношению к предлагаемым техническим решениям, формируют длиннопериодические сигналы, пропорциональные скорости изменения углов визирования, определяющих текущее направление зеркала антенного устройства на ОВ в горизонтальной и в вертикальной плоскостях. Сформированными длиннопериодическими сигналами воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с его зеркалом. Под действием этих сигналов создают длиннопериодические возмущающие управляющие моменты, которые вызывают момент гироскопической реакции в опорах осей прецессии соответствующих рамок карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости изменения соответствующих углов визирования. При этом также определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением зеркала антенного устройства на ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными скорости изменения углов визирования и, соответственно, длиннопериодическим возмущающим управляющим моментам. Эти сигналы преобразуют в длиннопериодические сигналы управления соответствующими электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на ОВ. При этом определяют сигналы, пропорциональные соответственно углу наклона и азимуту ОВ относительно основания антенного устройства. Одновременно при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем формируют сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90 градусов, наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, и короткопериодические сигналы, пропорциональные колебаниям подвижного носителя антенного устройства по тангажу и по рысканию, которые воздействуют на основание антенного устройства при одновременном его вращении по крену вместе с подвижным носителем. Под этим воздействием возникают аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают моменты гироскопической реакции в опорах осей прецессии соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление вектора которых совпадает с направлением векторов аддитивных короткопериодических возмущающих моментов. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов. Эти сигналы преобразуют в короткопериодические сигналы управления соответствующими электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают короткопериодические вращающие моменты, равные и противоположно направленные соответственно аддитивным короткопериодическим возмущающим моментам, действующим вокруг соответствующих осей вращения наружной и внутренней рамок карданова подвеса антенного устройства, для отработки аддитивных короткопериодических сигналов и стабилизации зеркала по тангажу и рысканию в текущем направлении на ОВ. При этом одновременно отрабатывают сигналы, пропорциональные угловой скорости короткопериодических отклонений рамок двухосного карданова подвеса антенного устройства, значение амплитуды которой в несколько раз меньше угловой скорости вращения по крену подвижного носителя. Отработанные аддитивные короткопериодические сигналы регистрируют и по этим сигналам, пропорциональным амплитуде и частоте короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства, определяют сигнал, пропорциональный периоду колебаний рамок двухосного карданова подвеса антенного устройства. По этому сигналу в течение всего времени вращения по крену подвижного носителя антенного устройства определяют сигнал, пропорциональный величине угловой скорости вращения по крену подвижного носителя, и одновременно формируют по зарегистрированным сигналам короткопериодические сигналы, сдвинутые по фазе на 90 градусов, для торможения вращения подвижного носителя по крену. Эти короткопериодические сигналы одновременно подают на входы внешних по отношению к предлагаемому техническому решению приводов рулей-элеронов, осуществляющих управление подвижным носителем относительно двух взаимно перпендикулярных осей симметрии подвижного носителя. Приводы рулей-элеронов по этим сигналам развивают короткопериодические вращающие моменты торможения вращения, равные и противоположно направленные соответственно аддитивным короткопериодическим возмущающим моментам, обусловленным вращением по крену подвижного носителя антенного устройства. При торможении вращения по крену подвижного носителя, когда сигнал, пропорциональный периоду короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства, превышает пороговое значение, соответствующее величине угловой скорости вращения по крену подвижного носителя, близкой к нулю, определяют сигнал остановки вращения по крену подвижного носителя антенного устройства. При этом одновременно определяют сигналы, пропорциональные углу наклона и азимуту ОВ. После остановки вращения по крену подвижного носителя одновременно осуществляют стабилизацию текущего направления зеркала антенного устройства на ОВ от действующих короткопериодических колебаний подвижного носителя относительно своего центра масс по крену, по тангажу и по рысканию в режиме косвенной гиростабилизации. При этом по сигналам, пропорциональным скорости изменения углов визирования, определяют текущее направление зеркала антенного устройства на ОВ в горизонтальной плоскости и в вертикальной плоскости.
Сущность предлагаемого изобретения заключается также в том, что система, осуществляющая способ, содержит антенное устройство, узел управления направлением зеркала антенного устройства на ОВ в горизонтальной плоскости, узел управления направлением зеркала антенного устройства на ОВ в вертикальной плоскости, узел гиростабилизации направления зеркала антенного устройства на ОВ по углу наклона, узел гиростабилизации направления зеркала антенного устройства на ОВ по азимуту и цифровое вычислительное устройство. При этом антенное устройство включает зеркало с облучателем, двухосный карданов подвес, ось вращения наружной рамки которого установлена на основании антенного устройства, а ось вращения внутренней рамки установлена в наружной рамке перпендикулярно к ее оси вращения, электродвигатель поворота наружной рамки карданова подвеса и электродвигатель поворота внутренней рамки карданова подвеса, датчик угла поворота наружной рамки карданова подвеса и датчик угла поворота внутренней рамки карданова подвеса соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп. Управляемый трехстепенной гироскоп установлен во внутренней рамке двухосного карданова подвеса антенного устройства так, что направление кинетического момента его ротора в зааретированном положении гироскопа совпадает с нулевым направлением линии визирования антенного устройства. Гироскоп содержит трехосный карданов подвес ротора гироскопа, датчик угла прецессии внутренней рамки трехосного карданова подвеса ротора гироскопа и датчик угла прецессии наружной рамки трехосного карданова подвеса ротора гироскопа, датчик момента управления направлением поворота внутренней рамки трехосного карданова подвеса ротора гироскопа и датчик момента управления направлением поворота наружной рамки трехосного карданова подвеса ротора гироскопа. При этом ось вращения ротора гироскопа установлена во внутренней рамке трехосного карданова подвеса, ось вращения которой установлена в наружной рамке трехосного карданова подвеса, ось вращения которой, в свою очередь, установлена в корпусе гироскопа. Корпус гироскопа жестко закреплен во внутренней рамке двухосного карданова подвеса антенного устройства. На соответствующих осях вращения рамок трехосного карданова подвеса ротора гироскопа установлены соответственно датчики угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа, а также соответственно датчики момента управления направлением поворота внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа. Антенное устройство также содержит электродвигатели, механически связанные каждый с осью вращения наружной рамки и с осью вращения внутренней рамки двухосного карданова подвеса антенного устройства, датчик угла поворота наружной рамки и датчик угла поворота внутренней рамки, установленные соответственно на основании антенного устройства и на наружной рамке двухосного карданова подвеса антенного устройства. При этом датчики угла поворота механически связаны соответственно с осью вращения наружной рамки и с осью вращения внутренней рамки. Зеркало антенного устройства выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира относительно облучателя, жестко закрепленного на основании антенного устройства. Зеркало соединено шарнирно жесткими тягами соответственно с наружной рамкой и с внутренней рамкой двухосного карданова подвеса антенного устройства так, что расстояние между каждым из шарниров жестких тяг на задней поверхности зеркала и его центром вращения равно расстоянию между каждым из шарниров, установленных соответственно на наружной рамке и на внутренней рамке карданова подвеса антенного устройства, и центром вращения этих рамок.
Первый и второй выходы цифрового вычислительного устройства соединены соответственно с входом узла управления направлением зеркала на ОВ в горизонтальной плоскости и с входом узла управления направлением зеркала на ОВ в вертикальной плоскости. Соответствующие выходы узлов управления соединены с соответствующими датчиками момента управления направлением поворота внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа и с первым и вторым входами цифрового вычислительного устройства. Выходы датчиков угла прецессии внутренней рамки и наружной рамки трехосного карданова подвеса ротора гироскопа соединены соответственно с входом узла гиростабилизации направления зеркала на ОВ по углу наклона и с входом узла гиростабилизации направления зеркала на ОВ по азимуту. Соответствующие выходы узлов гиростабилизации соединены с соответствующими электродвигателями вращения наружной рамки и внутренней рамки двухосного карданова подвеса антенного устройства. Выход датчика угла поворота наружной рамки и выход датчика угла поворота внутренней рамки двухосного карданова подвеса антенного устройства соединены соответственно с третьим и четвертым входами цифрового вычислительного устройства, информационный выход которого соединен информационной линией связи с входом внешнего по отношению к заявляемой системе устройства управления приводом рулей-элеронов подвижного носителя относительно двух взаимно перпендикулярных его осей симметрии, ортогональных продольной оси симметрии.
Введение указанных признаков в способ и в систему для его осуществления обеспечивает при круговом вращении основания антенного устройства относительно своей оси симметрии, ортогональной к плоскости основания, жестко связанного с корпусом вращающегося по крену подвижного носителя антенного устройства, формирование сигналов стабилизации направления зеркала антенного устройства на ОВ с одновременным формированием сигналов торможения вращения по крену подвижного носителя, сигналов стабилизации направления зеркала антенного устройства на ОВ при наличии также и колебаний подвижного носителя антенного устройства по тангажу и по рысканию, сигнала, пропорционального угловой скорости вращения по крену подвижного носителя, сигналов, пропорциональных текущему направлению зеркала антенного устройства на ОВ по углу наклона и по азимуту относительно основания антенного устройства, сигналов, пропорциональных текущему значению углов визирования ОВ в горизонтальной и в вертикальной плоскостях.
Из уровня техники не выявлено решений, имеющих признаки, совпадающие с отличительными признаками предлагаемых технических решений задачи формирования сигналов стабилизации направления зеркала антенного устройства на ОВ при круговом вращении его основания и торможения вращения по крену подвижного носителя антенного устройства. Поэтому предложенные технические решения этой задачи соответствуют условию изобретательского уровня.
Сущность изобретения поясняется чертежами, где представлены:
на фиг.1 - положение вектора  визирования ОВ в антенной системе координат Oxyz;
визирования ОВ в антенной системе координат Oxyz;
на фиг.2 - взаимное положение антенной системы координат Oxyz и местной горизонтальной системы Oξηξ;
на фиг.3 - взаимное положение связанной с подвижным носителем антенного устройства системы координат Ox1y1z1 и местной горизонтальной системы координат Оξηξ;
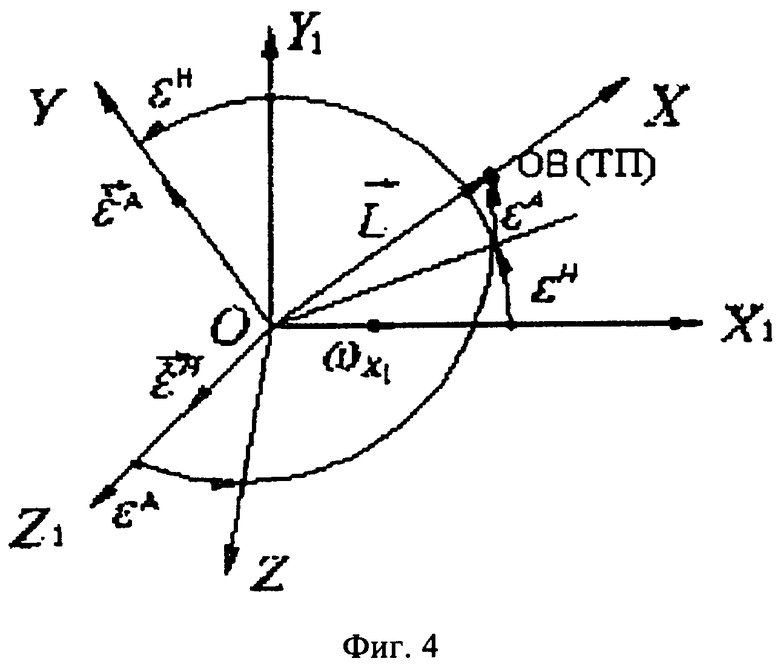
на фиг.4 - взаимное положение антенной системы координат Oxyz и связанной системы координат Ox1y1z1;
на фиг.5-8 - регистрируемые сигналы датчиков угла поворота рамок двухосного карданова подвеса антенного устройства при круговом вращении по крену γ с угловой скоростью  подвижного носителя антенного устройства;
подвижного носителя антенного устройства;
на фиг.9 - структурная схема системы, осуществляющая заявленный способ;
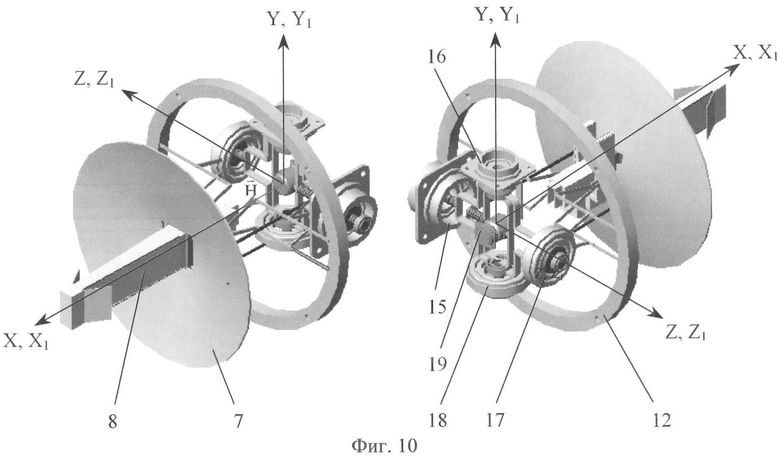
на фиг.10 - кинематическая схема антенного устройства системы, осуществляющей заявленный способ;
на фиг.11-16 - результаты математического моделирования: регистрируемые сигналы датчиков угла поворота рамок двухосного карданова подвеса антенного устройства при торможении вращения по крену подвижного носителя и при остановке его вращения с одновременными колебаниями подвижного носителя относительно своего центра масс по рысканию, тангажу и крену.
Предлагаемый способ характеризуется тем, что в цифровом вычислительном устройстве (ЦВУ), например, по сигналам рассогласования, т.е. ошибки радиолокационного автосопровождения ОВ, внешнего по отношению к заявляемому способу, пропорциональным составляющим e1 и е2 пространственной угловой координаты  и определяющим отклонение направления линии визирования, иначе, равносигнальной зоны диаграммы направленности антенного устройства относительно направления на ОВ в двух взаимно перпендикулярных плоскостях в антенной системе координат Oxyz (фиг.1) и/или по сигналам рассогласования (ошибки) инерциального измерения параметров вектора
и определяющим отклонение направления линии визирования, иначе, равносигнальной зоны диаграммы направленности антенного устройства относительно направления на ОВ в двух взаимно перпендикулярных плоскостях в антенной системе координат Oxyz (фиг.1) и/или по сигналам рассогласования (ошибки) инерциального измерения параметров вектора  визирования точки прицеливания (ТП), также внешнего по отношению к заявляемому способу, пропорциональным составляющим e1 и e2 пространственной угловой координаты
визирования точки прицеливания (ТП), также внешнего по отношению к заявляемому способу, пропорциональным составляющим e1 и e2 пространственной угловой координаты  и определяющим отклонение направления вектора
и определяющим отклонение направления вектора  визирования относительно направления на ТП в двух взаимно перпендикулярных плоскостях в антенной системе координат Oxyz, формируют длиннопериодические сигналы, пропорциональные скорости
визирования относительно направления на ТП в двух взаимно перпендикулярных плоскостях в антенной системе координат Oxyz, формируют длиннопериодические сигналы, пропорциональные скорости  и
и  изменения углов визирования, определяющих текущее направление на ОВ и/или на ТП в горизонтальной плоскости и в вертикальной плоскости (фиг.2). Указанные рассогласования (ошибки) обусловлены перемещением подвижного носителя относительно ОВ и/или ТП и возможным перемещением ОВ относительно подвижного носителя. Сформированными длиннопериодическими сигналами, пропорциональными угловым скоростям
изменения углов визирования, определяющих текущее направление на ОВ и/или на ТП в горизонтальной плоскости и в вертикальной плоскости (фиг.2). Указанные рассогласования (ошибки) обусловлены перемещением подвижного носителя относительно ОВ и/или ТП и возможным перемещением ОВ относительно подвижного носителя. Сформированными длиннопериодическими сигналами, пропорциональными угловым скоростям  и
и  , воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с зеркалом. Под действием этих сигналов создают длиннопериодические возмущающие управляющие моменты, которые вызывают момент гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом возникает длиннопериодическое прецессионное вращение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости
, воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса антенного устройства, наружная и внутренняя рамки которого шарнирно связаны с зеркалом. Под действием этих сигналов создают длиннопериодические возмущающие управляющие моменты, которые вызывают момент гироскопической реакции в опорах осей прецессии соответствующих рамок трехосного карданова подвеса ротора гироскопа. При этом возникает длиннопериодическое прецессионное вращение соответствующих рамок трехосного карданова подвеса ротора гироскопа с угловой скоростью, близкой по величине к угловой скорости  и изменения соответствующих углов визирования. При этом определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением зеркала антенного устройства на ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными скорости
и изменения соответствующих углов визирования. При этом определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением зеркала антенного устройства на ОВ, задаваемым сформированными длиннопериодическими сигналами, пропорциональными скорости  и изменения углов визирования в горизонтальной и вертикальной плоскости и, соответственно, длиннопериодическим возмущаемым управляющим моментам. Эти сигналы преобразуют в длиннопериодические сигналы управления соответствующими электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на ОВ. При этом определяют сигналы, пропорциональные, соответственно, углу наклона εН и азимуту εA ОВ относительно основания антенного устройства (фиг.4).
и изменения углов визирования в горизонтальной и вертикальной плоскости и, соответственно, длиннопериодическим возмущаемым управляющим моментам. Эти сигналы преобразуют в длиннопериодические сигналы управления соответствующими электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала в текущее направление на ОВ. При этом определяют сигналы, пропорциональные, соответственно, углу наклона εН и азимуту εA ОВ относительно основания антенного устройства (фиг.4).
Рассмотрим теоретические предпосылки, лежащие в основе предлагаемого технического решения.
Предполагая сначала отсутствие колебаний подвижного носителя относительно своего центра масс по рысканию ψ и по тангажу ϑ (фиг.3) и допуская, что сигналы, пропорциональные угловой скорости изменения горизонтального угла визирования εГ и угловой скорости изменения вертикального угла визирования εВ, равны нулю и при этом считая, что εГ=0 и εВ=const, при круговом вращении основания антенного устройства вместе с корпусом вращающегося по крену γ с угловой скоростью  подвижного носителя регистрируют при этих условиях сигналы, пропорциональные углу отклонений по наклону εН наружной рамки и отклонениям по азимуту εА внутренней рамки двухосного карданова подвеса антенного устройства, формируемые согласно алгоритму:
подвижного носителя регистрируют при этих условиях сигналы, пропорциональные углу отклонений по наклону εН наружной рамки и отклонениям по азимуту εА внутренней рамки двухосного карданова подвеса антенного устройства, формируемые согласно алгоритму:

При упомянутых выше условиях сигналы, пропорциональные угловым скоростям  и
и  изменения угла наклона εH и азимута εA определяются, следовательно, из соотношений, полученных путем дифференцирования уравнений (1), т.е.:
изменения угла наклона εH и азимута εA определяются, следовательно, из соотношений, полученных путем дифференцирования уравнений (1), т.е.:

Принимая во внимание, что  и
и  , представим соотношения (2) в следующем виде:
, представим соотношения (2) в следующем виде:

При этом амплитуды колебаний наружной рамки и внутренней рамки двухосного карданова подвеса антенного устройства соответственно по углу наклона εH max и по азимуту εA max равны:
При круговом вращении по крену γ основания антенного устройства выражения (4) могут быть записаны в виде:
где
k=1, 2, 3, ..., n.
Из выражений (3) следует, что

причем

где  ,
,  - модули значения амплитуды угловой скорости колебаний соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства по углу наклона εH и азимуту εA с угловой частотой
- модули значения амплитуды угловой скорости колебаний соответственно наружной и внутренней рамок двухосного карданова подвеса антенного устройства по углу наклона εH и азимуту εA с угловой частотой  .
.
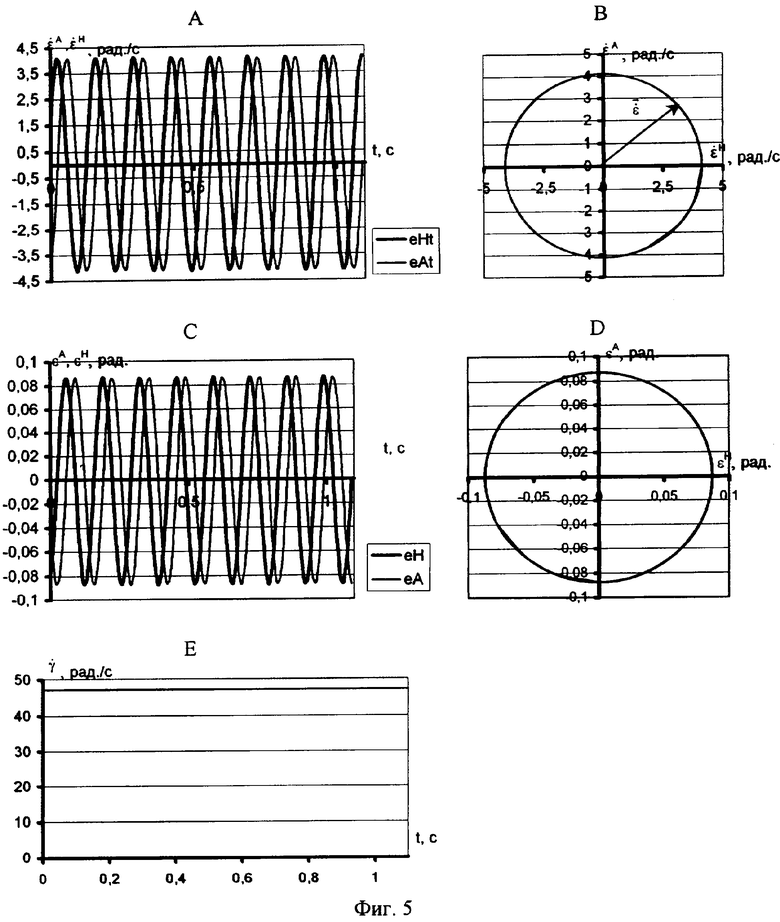
Если предположить, что εH max=εA max=εmax, то из выражений (6) следует (диаграмма А на фиг.5):

Следовательно, выражение

есть уравнение окружности (диаграмма В на фиг.5) радиусом

характеризующее круговое вращение двухосного карданова подвеса, связанного шарнирно с зеркалом, вместе с основанием антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя. Из выражений (3), (4) и (8) следует, что (диаграмма С на фиг.5)

Следовательно, например, при исходных условиях: ψ=0; ϑ=0; εГ=0; εВ=-5°;  ;
;  (фиг.5) колебания наружной и внутренней рамок карданова подвеса антенного устройства по сравнению с длиннопериодическими колебаниями, обусловленными угловыми скоростями и , при круговом вращении по крену γ основания антенного устройства с угловой частотой
(фиг.5) колебания наружной и внутренней рамок карданова подвеса антенного устройства по сравнению с длиннопериодическими колебаниями, обусловленными угловыми скоростями и , при круговом вращении по крену γ основания антенного устройства с угловой частотой  и при принятых условиях являются короткопериодическими с амплитудой колебаний εH max и εA max (диаграмма С на фиг.5), а также с частотой и периодом колебаний соответственно
и при принятых условиях являются короткопериодическими с амплитудой колебаний εH max и εA max (диаграмма С на фиг.5), а также с частотой и периодом колебаний соответственно


Поэтому согласно предлагаемому способу одновременно с формированием упомянутых выше длиннопериодических сигналов формируют сигналы, пропорциональные амплитуде εH max и εA max и частоте fγ короткопериодических колебаний, сдвинутых по фазе на 90 градусов, т.е. согласно выражениям (11):

наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения (диаграммы А и С на фиг.5).
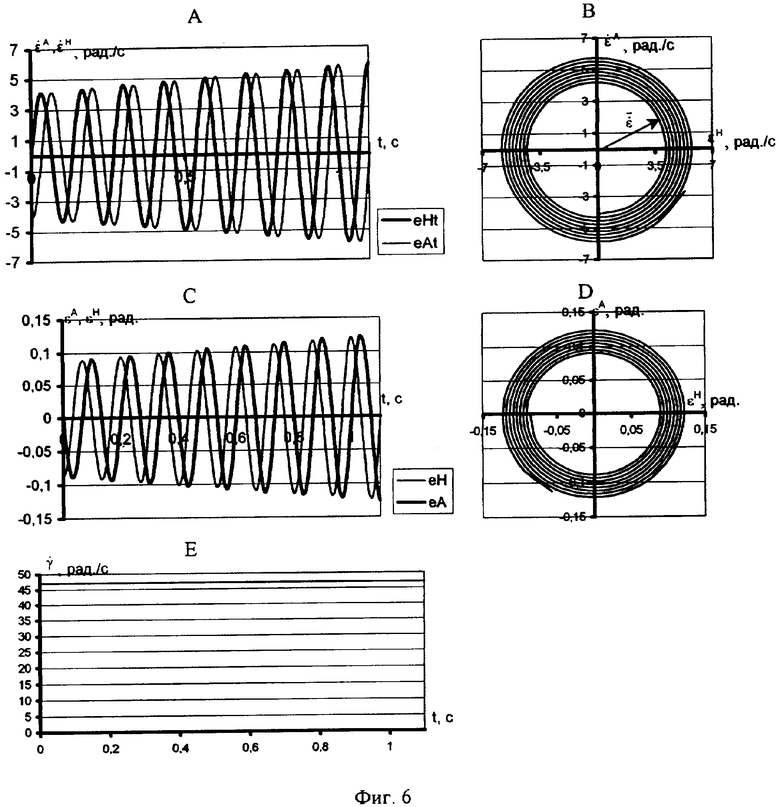
При этом, например, при исходных условиях: ψ=0; ϑ=0; εГ=0; εВ=-5°;  ; (фиг.6), т.е. в случае, когда подвижный носитель сближается с ОВ и при этом возрастает вертикальный угол визирования εB, согласно соотношениям (4) (диаграмма Е на фиг.6) возрастает амплитуда колебаний наружной рамки εH и внутренней рамки εA двухосного карданова подвеса антенного устройства (диаграмы С и D на фиг.6), а также возрастает амплитуда угловой скорости
; (фиг.6), т.е. в случае, когда подвижный носитель сближается с ОВ и при этом возрастает вертикальный угол визирования εB, согласно соотношениям (4) (диаграмма Е на фиг.6) возрастает амплитуда колебаний наружной рамки εH и внутренней рамки εA двухосного карданова подвеса антенного устройства (диаграмы С и D на фиг.6), а также возрастает амплитуда угловой скорости  и
и  их изменения соответственно (диаграммы А и В на фиг.6).
их изменения соответственно (диаграммы А и В на фиг.6).
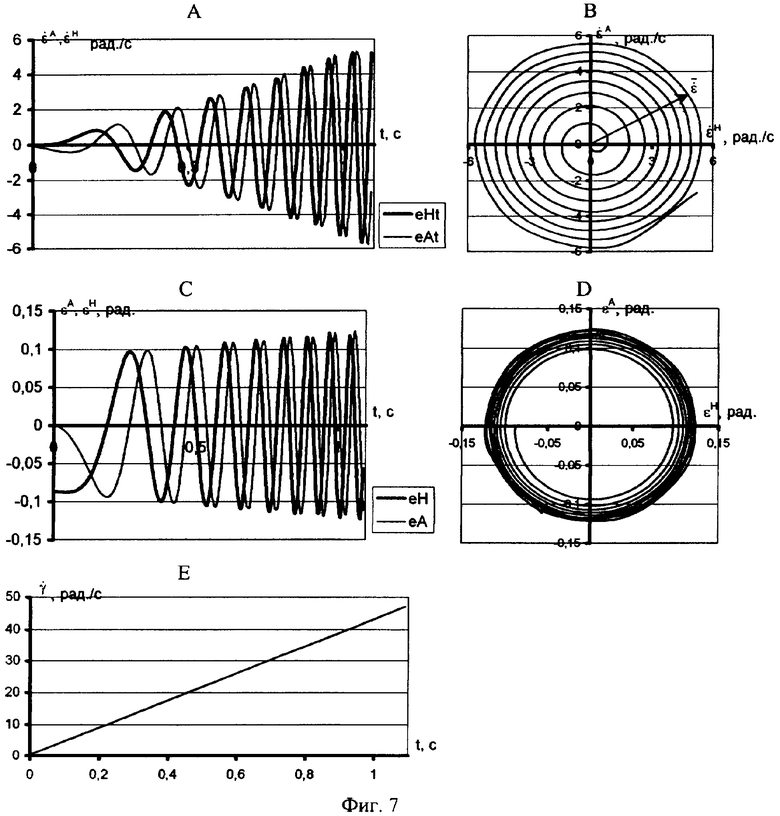
Когда, например, при исходных условиях: ψ=0; ϑ=0; εГ=0; εВ=-5°; ;  , где
, где  (фиг.7), т.е. происходит стартовое перемещение подвижного носителя с увеличением угловой скорости
(фиг.7), т.е. происходит стартовое перемещение подвижного носителя с увеличением угловой скорости  его вращения по крену с угловым ускорением
его вращения по крену с угловым ускорением 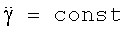 (диаграмма Е на фиг.7), частота fγ колебаний наружной и внутренней рамок двухосного карданова подвеса при этом возрастает пропорционально угловой скорости
(диаграмма Е на фиг.7), частота fγ колебаний наружной и внутренней рамок двухосного карданова подвеса при этом возрастает пропорционально угловой скорости  вращения основания антенного устройства, а период Тγ их колебаний соответственно уменьшается согласно соотношениям (3), (4), (8), (11), что иллюстрируется диаграммами А, В, С, D на фиг.7.
вращения основания антенного устройства, а период Тγ их колебаний соответственно уменьшается согласно соотношениям (3), (4), (8), (11), что иллюстрируется диаграммами А, В, С, D на фиг.7.
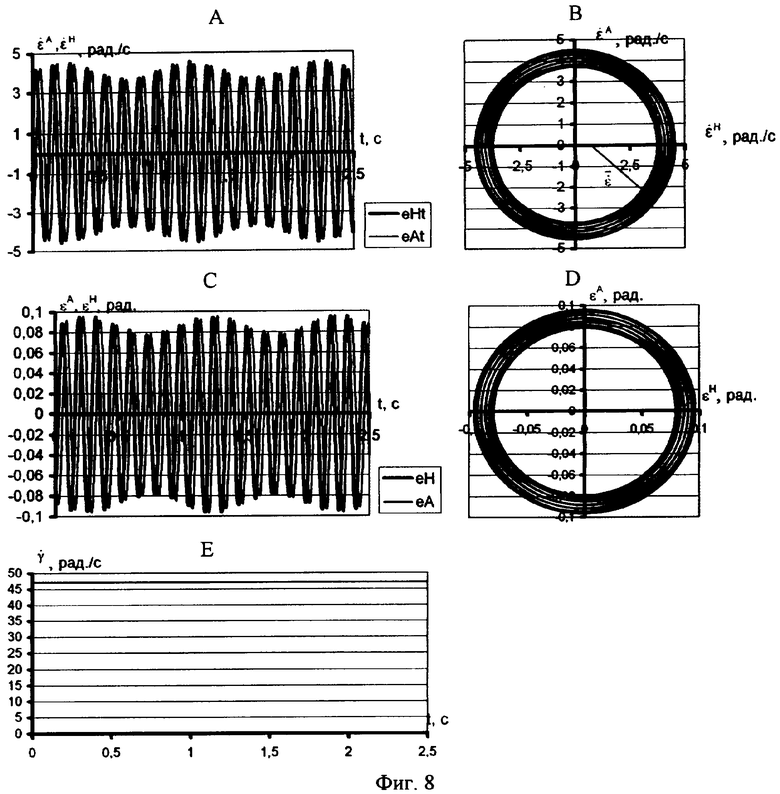
Если теперь снять ограничения, принятые выше, т.е. предположить, что одновременно с круговым вращением основания антенного устройства вместе с вращающимся по крену γ подвижным носителем имеют место колебания его по рысканию ψ и по тангажу ϑ (фиг.3), т.е.


причем

где
 (диаграмма Е на фиг.8);
(диаграмма Е на фиг.8);
fψ и fϑ - частота колебания подвижного носителя соответственно по рысканию и тангажу,
и допустить при этом, что угол визирования εB в вертикальной плоскости постоянный и угол визирования εГ в горизонтальной плоскости равен нулю, то при этих исходных условиях, т.е., например, при ψ=ψmax·sin(2πfψt); ϑ=ϑmax·sin(2πfϑt), где ψmax=0,5°, ϑmax=0,5°, fψ=1 Гц, fϑ=1 Гц; εГ=0; εB=0;  (фиг.8), согласно заявляемому способу одновременно с упомянутыми выше сигналами, пропорциональными амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90 градусов, наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, формируют и короткопериодические сигналы, пропорциональные колебаниям подвижного носителя по рысканию и тангажу. При этом определяют и регистрируют аддитивные короткопериодические сигналы, пропорциональные амплитуде и частоте аддитивных короткопериодических колебаний наружной рамки по углу наклона и внутренней рамки по азимуту двухосного карданова подвеса антенного устройства и угловой скорости их изменения, определяемых согласно алгоритму:
(фиг.8), согласно заявляемому способу одновременно с упомянутыми выше сигналами, пропорциональными амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90 градусов, наружной и внутренней рамок двухосного карданова подвеса антенного устройства и шарнирно связанного с ним зеркала относительно своих осей вращения, формируют и короткопериодические сигналы, пропорциональные колебаниям подвижного носителя по рысканию и тангажу. При этом определяют и регистрируют аддитивные короткопериодические сигналы, пропорциональные амплитуде и частоте аддитивных короткопериодических колебаний наружной рамки по углу наклона и внутренней рамки по азимуту двухосного карданова подвеса антенного устройства и угловой скорости их изменения, определяемых согласно алгоритму:


В рассматриваемом случае согласно алгоритмам (18) и (19) амплитуда короткопериодических сигналов, пропорциональных аддитивным короткопериодическим колебаниям наружной рамки по углу наклона и внутренней рамки по азимуту двухосного карданова подвеса антенного устройства и соответствующим им колебаниям угловой скорости их изменения, модулируется более низкой частотой fψ и fϑ колебаний подвижного носителя по рысканию и по тангажу по сравнению с частотой fγ колебания рамок двухосного карданова подвеса антенного устройства, обусловленной круговым вращением его основания вместе с вращением по крену подвижного носителя (диаграммы А, В, С, D фиг.8).
Колебания подвижного носителя по рысканию и по тангажу при одновременном его вращении по крену воздействуют на основание антенного устройства и вызывают аддитивные короткопериодические колебания наружной и внутренней рамок двухосного карданова подвеса антенного устройства, регистрируемые в виде пропорциональных им аддитивных короткопериодических сигналов, упомянутых выше. Аддитивные короткопериодические колебания рамок двухосного карданова подвеса антенного устройства вызывают аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают момент гироскопической реакции, т.е. гироскопический момент, в опорах осей прецессии соответствующих рамок карданова подвеса ротора гироскопа.
При этом возникает аддитивное короткопериодическое прецессионное вращение соответствующих рамок карданова подвеса ротора гироскопа с угловыми скоростями, направление векторов которых совпадает с направлением аддитивных короткопериодических возмущающих моментов. Одновременно определяют сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора гироскопа и направлением вектора аддитивных короткопериодических возмущающих моментов. Эти сигналы преобразуют в аддитивные короткопериодические сигналы управления соответствующими электродвигателями вращения рамок двухосного карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают аддитивные короткопериодические вращающие моменты, равные и противоположно направленные соответственно аддитивным короткопериодическим возмущающим моментам, действующим вокруг соответствующих осей вращения наружной и внутренней рамок карданова подвеса антенного устройства. По сигналам управления электродвигатели развивают эти вращающие моменты для отработки аддитивных короткопериодических сигналов и стабилизации зеркала по рысканию и по тангажу в текущем направлении на ОВ по углу визирования в горизонтальной плоскости и по углу визирования в вертикальной плоскости с одновременной отработкой сигналов, пропорциональных угловой скорости короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства по углу наклона и по азимуту.
Из соотношений (3) и (5) следует, что при малых углах визирования (εB≤7°)


т.е. значение амплитуды отрабатываемых сигналов, пропорциональных угловой скорости короткопериодических колебаний наружной рамки и внутренней рамки двухосного карданова подвеса, в несколько раз, а при малых углах визирования в вертикальной плоскости и в горизонтальной плоскости - на порядок, меньше сигналов, пропорциональных угловой скорости вращения по крену основания антенного устройства вместе с подвижным носителем.
Отработанные аддитивные короткопериодические сигналы регистрируют. По этим короткопериодическим сигналам, пропорциональным амплитуде и частоте короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства по углу наклона и по азимуту, определяют сигнал, пропорциональный периоду колебаний рамок двухосного карданова подвеса антенного устройства, который согласно соотношению (13) обратно пропорционален угловой частоте вращения по крену подвижного носителя. По этому сигналу в течение всего времени вращения по крену подвижного носителя антенного устройства определяют сигнал, пропорциональный величине угловой скорости вращения по крену подвижного носителя.
Одновременно по зарегистрированным короткопериодическим сигналам формируют сигналы торможения вращения подвижного носителя по крену, пропорциональные короткопериодическим колебаниям рамок двухосного карданова подвеса антенного устройства по углу наклона и по азимуту, а также пропорциональные угловой скорости изменения угла наклона и угловой скорости изменения азимута, согласно алгоритмам (18) и (19), реализуемым двухосным кардановым подвесом антенного устройства, сдвинутые по фазе на 90 градусов. Эти сигналы преобразуют в электрические сигналы торможения и одновременно подают на входы внешних по отношению к заявляемому техническому решению приводов соответствующих рулей-элеронов, осуществляющих управление подвижным носителем относительно двух взаимно перпендикулярных осей симметрии подвижного носителя. Приводы рулей-элеронов развивают аддитивные короткопериодические вращающие моменты торможения, равные и противоположно направленные соответственно направлению аддитивных короткопериодических возмущающих моментов, обусловленных вращением по крену подвижного носителя, благодаря чему результирующий момент, противоположно направленный вектору угловой скорости вращения по крену подвижного носителя, вызывает торможение вращения его по крену.
При торможении вращения по крену подвижного носителя, когда сигнал, пропорциональный периоду короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства, превышает величину, пропорциональную пороговому значению, соответствующему угловой скорости вращения по крену подвижного носителя, близкой к нулю, определяют сигнал остановки вращения по крену подвижного носителя антенного устройства. При этом ускоренное торможение вращения подвижного носителя по крену одновременно обеспечивается как формируемыми короткопериодическими сигналами согласно предлагаемому способу, так и аэродинамическими стабилизаторами подвижного носителя антенного устройства.
При торможении вращения по крену подвижного носителя одновременно определяют сигналы, пропорциональные углу наклона и азимуту ОВ, и сигналы, пропорциональные углам визирования ОВ в горизонтальной и в вертикальной плоскостях.
Предлагаемая система (фиг.9, фиг.10), осуществляющая заявляемый способ, содержит антенное устройство 1, узел управления 2 направлением зеркала 7 антенного устройства 1 на ОВ в горизонтальной плоскости, узел управления 3 направлением зеркала 7 антенного устройства 1 на ОВ в вертикальной плоскости, узел гиростабилизации 4 направления зеркала 7 антенного устройства 1 на ОВ по углу наклона, узел гиростабилизации 5 направления зеркала 7 антенного устройства 1 на ОВ по азимуту и цифровое вычислительное устройство 6.
При этом антенное устройство 1 включает в свой состав зеркало 7 с облучателем 8, двухосный карданов подвес 9, ось вращения 10 наружной рамки 11 которого установлена на основании 12 антенного устройства 1, а ось вращения 13 внутренней рамки 14 установлена в наружной рамке 11 перпендикулярно к ее оси вращения 10, электродвигатель 15 поворота наружной рамки 11 карданова подвеса 9 и электродвигатель 16 поворота внутренней рамки 14 карданова подвеса 9, датчик угла 17 поворота наружной рамки 11 карданова подвеса 9 и датчик угла 18 поворота внутренней рамки 14 карданова подвеса 9 соответственно по углу наклона и по азимуту, а также управляемый трехстепенной гироскоп 19.
Управляемый трехстепенной гироскоп 19 установлен во внутренней рамке 14 двухосного карданова подвеса 9 антенного устройства 1 так, что направление кинетического момента его ротора 20 в заарретированном положении гироскопа 19 совпадает с нулевым направлением линии визирования антенного устройства 1.
Гироскоп 19 содержит трехосный карданов подвес 21 ротора 20 гироскопа 19, датчик угла 22 прецессии внутренней рамки 23 трехосного карданова подвеса 21 ротора 20 гироскопа 19 и датчик угла 24 прецессии наружной рамки 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19, датчик момента 26 управления направлением поворота внутренней рамки 23 трехосного карданова подвеса 21 ротора 20 гироскопа 19 и датчик момента 27 управления направлением поворота наружной рамки 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19. При этом ось собственного вращения 28 ротора гироскопа 19 установлена во внутренней рамке 23 трехосного карданова подвеса 21 ротора 20 гироскопа 19, ось вращения 29 которой установлена в наружной рамке 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19, ось вращения 30 которой, в свою очередь, установлена в корпусе гироскопа 19. Причем корпус гироскопа 19 жестко закреплен во внутренней рамке 14 двухосного карданова подвеса 9 антенного устройства 1. На соответствующих осях вращения 29 и 30 рамок 23 и 25 карданова подвеса 21 ротора 20 гироскопа 19 установлены соответственно датчики угла 22 и 24 прецессии внутренней рамки 23 и наружной рамки 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19, а также соответственно датчики момента 26 и 27 управления направлением поворота внутренней рамки 23 и наружной рамки 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19.
Антенное устройство 1 также содержит электродвигатели 15 и 16, механически связанные каждый с осью вращения 10 наружной рамки 11 и с осью вращения 13 внутренней рамки 14 двухосного карданова подвеса 9 антенного устройства 1, датчик угла 17 поворота наружной рамки 11 и датчик угла 18 поворота внутренней рамки 14, установленные соответственно на основании 12 антенного устройства 1 и на наружной рамке 11 двухосного карданова подвеса 9 антенного устройства 1. При этом датчики угла 17 и 18 поворота механически связаны соответственно с осью вращения 10 наружной рамки и с осью вращения 13 внутренней рамки 14.
Зеркало 7 антенного устройства 1 выполнено с возможностью поворота в двух взаимно перпендикулярных плоскостях с помощью двухстепенного шарнира 31 относительно центра излучения облучателя 8, жестко закрепленного на основании 12 антенного устройства 1. Зеркало 7 соединено шарнирно жесткими тягами 32 и 33 соответственно с наружной рамкой 11 и с внутренней рамкой 14 двухосного карданова подвеса 9 антенного устройства 1 так, что расстояние между каждым из шарниров жестких тяг 32 и 33 на задней поверхности зеркала 7 и его центром вращения равны расстоянию между каждым из шарниров, установленных соответственно на наружной рамке 11 и на внутренней рамке 14 двухосного карданова подвеса 9 антенного устройства 1, и центром вращения этих рамок.
Первый и второй выходы ЦВУ 6 соединены соответственно с входом узла управления 2 направлением зеркала 7 на ОВ в горизонтальной плоскости и со входом узла управления 3 направлением зеркала 7 на ОВ в вертикальной плоскости. Соответствующие выходы узлов управления 2 и 3 соединены с соответствующими датчиками момента 26 и 27 управления направлением поворота внутренней рамки 23 и наружной рамки 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19 и с первым и вторым входами ЦВУ 6. Выходы датчиков угла 22 и 24 прецессии внутренней рамки 23 и наружной рамки 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19 соединены соответственно с входом узла гиростабилизации 4 направления зеркала 7 на ОВ по углу наклона и с входом узла гиростабилизации 5 направления зеркала 7 на ОВ по азимуту. Соответствующие выходы узлов гиростабилизации 4 и 5 соединены с соответствующими электродвигателями 15 и 16 вращения наружной 11 и внутренней 14 рамок двухосного карданова подвеса 9 антенного устройства 1. Выход датчика угла 17 поворота наружной рамки 11 и выход датчика угла 18 поворота внутренней рамки 14 двухосного карданова подвеса 9 антенного устройства 1 соединены соответственно с третьим и четвертым входами ЦВУ 6, информационный выход которого соединен информационной линией 34 связи с входом внешнего по отношению к заявляемой системе устройства управления приводами рулей-элеронов подвижного носителя.
Работа предлагаемой системы, осуществляющей способ, выполняется следующим образом.
С выхода ЦВУ 6 длиннопериодические сигналы, пропорциональные скоростям изменения углов визирования, определяющих текущее направление зеркала 7 антенного устройства 1 на ОВ соответственно в горизонтальной и в вертикальной плоскости, поступают на соответствующие входы узла управления направлением зеркала 7 антенного устройства 1 на ОВ в горизонтальной плоскости и узла 3 управления направлением зеркала 7 антенного устройства 1 на ОВ в вертикальной плоскости. С выхода узла управления 2 и с выхода узла управления 3 усиленные по напряжению и по мощности длиннопериодические сигналы поступают на соответствующие датчики момента 26 и 27 трехосного гироскопа 19.
Под действием этих сигналов создаются длиннопериодические возмущающие управляющие моменты, которые согласно прецессионной теории гироскопа вызывают момент гироскопической реакции, т.е. гироскопический момент, в опорах осей 29 и 30 прецессии соответствующих рамок 23 и 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19. При этом возникает длиннопериодическое прецессионное вращение соответствующих рамок 23 и 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19 с угловыми скоростями, близкими по величине угловым скоростям изменения углов визирования. В результате с выхода датчиков углов прецессии 22 и 24 длиннопериодические сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора 20 гироскопа 19 и задаваемым соответствующими выходными сигналами ЦВУ 6 направлением на ОВ зеркала 7 антенного устройства 1, поступают соответственно на вход узла гиростабилизации 4 направления на ОВ зеркала 7 антенного устройства 1 по углу наклона и на вход узла гиростабилизации 5 направления на ОВ зеркала 7 антенного устройства 1 по азимуту. С выхода узла гиростабилизации 4 и с выхода узла гиростабилизации 5 сформированные длиннопериодические сигналы подаются на обмотки управления соответствующих электродвигателей 15 и 16 вращения рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1. По этим длиннопериодическим сигналам электродвигатели 15 и 16 развивают длиннопериодические вращающие моменты, равные и совпадающие по направлению с направлением соответствующих длиннопериодических возмущающих управляющих моментов, для поворота наружной и внутренней рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1 и шарнирно связанного с ним зеркала 7 в текущее направление на ОВ.
При этом на выходе соответственно датчика угла 17 поворота наружной рамки 11 и датчика угла 18 поворота внутренней рамки 14 двухосного карданова подвеса 9 антенного устройства 1 формируются длиннопериодические сигналы, пропорциональные соответственно текущим значениям угла наклона и азимута ОВ относительно основания 12 антенного устройства 1.
При круговом вращении основания 12 антенного устройства 1 вместе с вращающимся по крену подвижным носителем наружная и внутренняя рамки 11 и 14 двухосного карданова подвеса 9 антенного устройства 1 совершают короткопериодические (в простейшем случае - гармонические) колебания относительно соответственно своих осей вращения 10 и 13. Следовательно, при круговом вращении основания 12 на выходе соответственно датчиков угла 17 и 18 поворота наружной и внутренней рамок 11 и 14 одновременно с длиннопериодическими сигналами формируются сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний, сдвинутых по фазе на 90 градусов, наружной и внутренней рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1 и шарнирно связанного с ним зеркала 7 антенного устройства 1. Кроме того, одновременно аддитивно на выходе датчиков угла 17 и 18 также формируются короткопериодические сигналы, пропорциональные имеющим место колебаниям подвижного носителя антенного устройства 1 по тангажу и по рысканию, которые воздействуют на основание 12 антенного устройства 1 при одновременном его вращении вместе с подвижным носителем по крену.
Под этим воздействием возникают аддитивные короткопериодические возмущающие моменты, которые, в свою очередь, вызывают моменты гироскопической реакции в опорах осей 29 и 30 прецессии соответствующих рамок 23 и 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19. Вследствие этого возникают аддитивные короткопериодические прецессионные колебания соответствующих рамок 23 и 25 трехосного карданова подвеса 21 ротора 20 гироскопа 19 с угловыми скоростями, направление вектора которых совпадает с направлением векторов аддитивных короткопериодических возмущающих моментов. В результате с выхода датчиков углов прецессии 22 и 24 аддитивные короткопериодические сигналы, пропорциональные рассогласованию между направлением кинетического момента ротора 20 гироскопа 19 и направлением вектора аддитивных короткопериодических возмущающих моментов, поступают соответственно на вход узла гиростабилизации 4 и на вход узла гиростабилизации 5. С выхода узла гиростабилизации 4 и с выхода узла гиростабилизации 5 сформированные аддитивные короткопериодические сигналы подаются на обмотки управления соответствующих электродвигателей 15 и 16 вращения рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1. Под воздействием этих аддитивных короткопериодических сигналов электродвигатели 15 и 16 развивают аддитивные короткопериодические вращающие моменты, равные и противоположно направленные соответственно аддитивным короткопериодическим возмущающим моментам, действующим вокруг соответствующих осей вращения 10 и 13 наружной и внутренней рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1, для отработки аддитивных короткопериодических сигналов и стабилизации зеркала 7 по тангажу и по рысканию в текущем направлении на ОВ. При этом электродвигатели 15 и 16 одновременно отрабатывают сигналы, пропорциональные угловой скорости короткопериодических колебаний рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1, значение амплитуды которой в несколько раз, а при малых углах визирования до 7 градусов на порядок меньше угловой скорости вращения по крену подвижного носителя. В результате отработки электродвигателями 15 и 16 аддитивных короткопериодических сигналов с выхода соответствующих датчиков угла 17 и 18 поворота наружной и внутренней рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1 сигналы, пропорциональные амплитуде и частоте короткопериодических колебаний рамок 11 и 14, подаются на соответствующие входы ЦВУ 6. В ЦВУ 6 по этим сигналам формируется сигнал, пропорциональный периоду колебаний рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1. По этому сформированному сигналу в ЦВУ 6 в течение всего времени вращения по крену подвижного носителя вместе с основанием 12 антенного устройства 1 определяется сигнал, пропорциональный величине угловой скорости вращения по крену подвижного носителя. Одновременно в ЦВУ 6 по короткопериодическим сигналам датчиков угла 17 и 18 формируются короткопериодические сигналы, сдвинутые по фазе на 90 градусов, для торможения вращения по крену подвижного носителя. Эти сформированные короткопериодические сигналы одновременно поступают из ЦВУ 6 по информационной линии связи 34 на вход внешнего по отношению к предлагаемому техническому решению устройства управления приводов рулей-элеронов подвижного носителя антенного устройства 1, которые осуществляют управление подвижным носителем относительно двух взаимно перпендикулярных осей симметрии подвижного носителя. Под воздействием этих короткопериодических сигналов приводы рулей-элеронов развивают короткопериодические вращающие моменты торможения вращения, равные и противоположно направленные соответственно аддитивным короткопериодическим возмущающим моментам, обусловленным вращением по крену подвижного носителя антенного устройства 1.
При торможении вращения по крену подвижного носителя, когда сигнал, пропорциональный периоду короткопериодических колебаний рамок 11 и 14 двухосного карданова подвеса 9 антенного устройства 1, превысит пороговое значение, соответствующее величине угловой скорости вращения по крену подвижного носителя, близкой к нулю, в ЦВУ 6 формируется сигнал остановки вращения по крену подвижного носителя. При этом с выхода датчика угла 17 подается на соответствующий вход ЦВУ 6 сигнал, пропорциональный текущему значению угла наклона ОВ, а с выхода датчика угла 18 подается на соответствующий вход ЦВУ 6 сигнал, пропорциональный текущему значению азимута ОВ. После остановки вращения по крену подвижного носителя одновременно предлагаемая система осуществляет стабилизацию текущего направления на ОВ зеркала 7 антенного устройства 1 от действующих при этом короткопериодических колебаний подвижного носителя относительно своего центра масс по крену, по тангажу и по рысканию в режиме косвенной гиростабилизации и одновременно в ЦВУ 6 формируются сигналы стабилизации подвижного носителя в горизонтальной плоскости, в вертикальной плоскости и по крену, выдаваемые из ЦВУ 6 по информационной линии связи 34. При этом по сигналам, подаваемым их ЦВУ 6 на вход датчика момента 26 и на вход датчика момента 27 и пропорциональным соответственно скоростям изменения углов визирования, в ЦВУ 6 определяется текущее направление на ОВ зеркала 7 антенного устройства 1 в горизонтальной плоскости и в вертикальной плоскости.
В качестве математической модели сигналов, регистрируемых при торможении вращения по крену подвижного носителя и пропорциональных колебаниям наружной рамки 11 по углу наклона и внутренней рамки 14 по азимуту двухосного карданова подвеса 9 антенного устройства 1, установленного жестко внутри корпуса вращающегося по крену подвижного носителя, формируют сигналы согласно алгоритмам (18) и (19), где угловая скорость вращения по крену подвижного носителя определяется из алгоритма:

где
i - инкремент;
Δt - интервал дискретизации;
 - максимальное угловое ускорение вращения по крену, достигаемое подвижным носителем при старте, 1/с2;
- максимальное угловое ускорение вращения по крену, достигаемое подвижным носителем при старте, 1/с2;
qi - коэффициент демпфирования вращения по крену подвижного носителя, определяемый из выражения:

где
τ - постоянная времени, принятая при математическом моделировании процесса торможения вращения по крену подвижного носителя антенного устройства, эквивалентная электромеханической постоянной времени привода рулей-элеронов подвижного носителя, характеризующая запаздывание при отработке приводом сигналов торможения;
ti - текущее время перемещения подвижного носителя, с, причем

k - коэффициент пропорциональности, 1/с2.
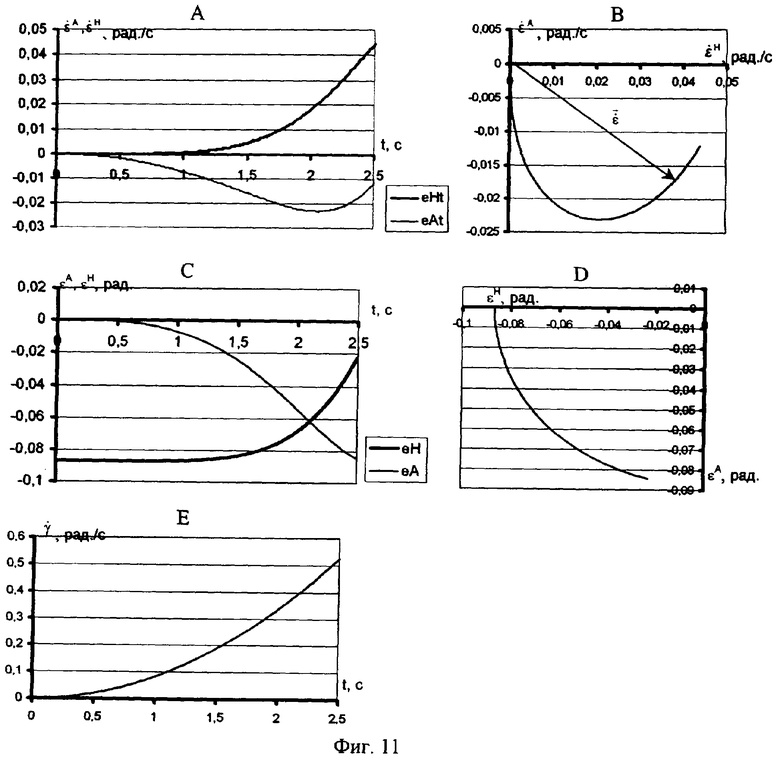
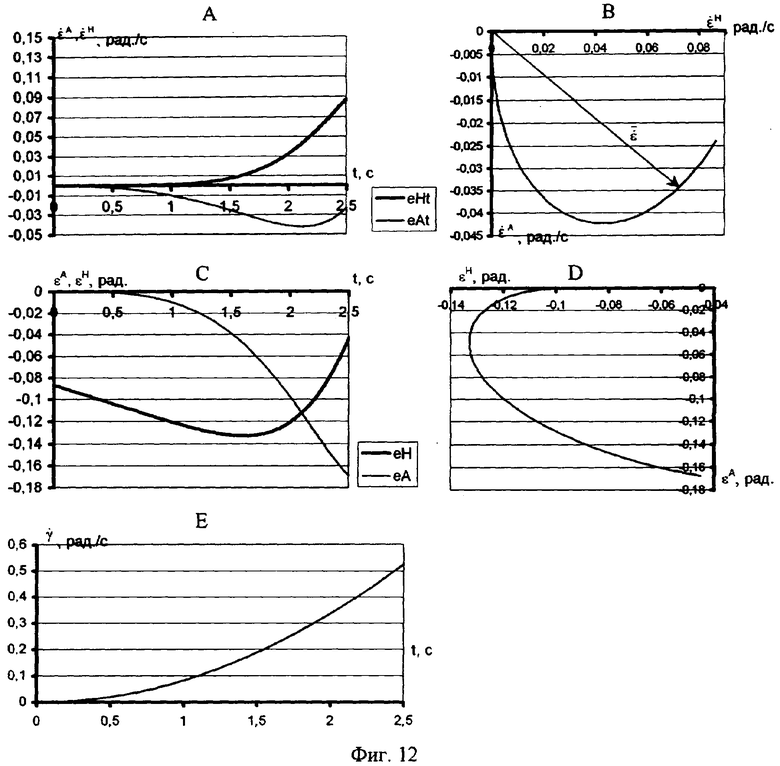
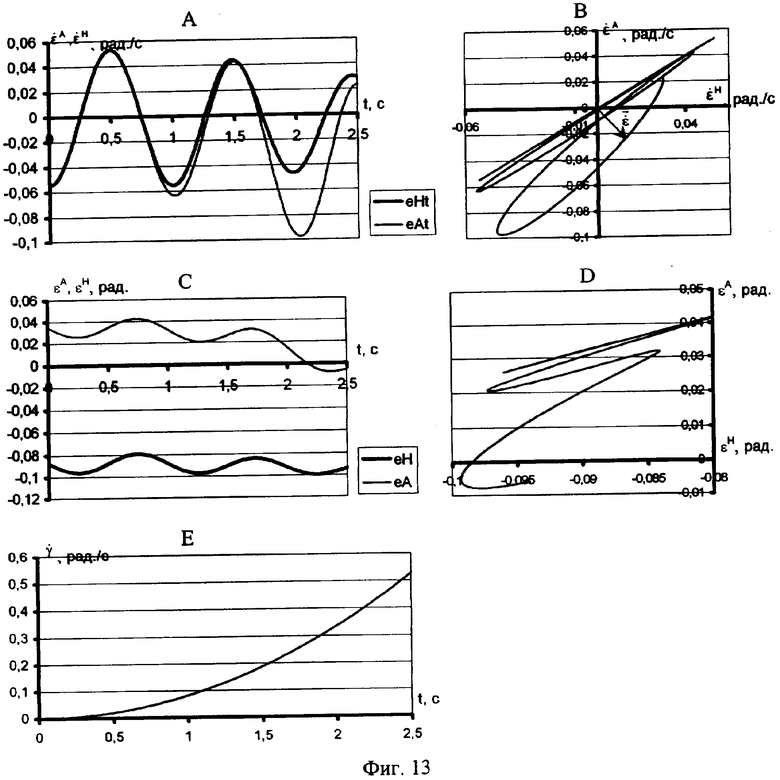
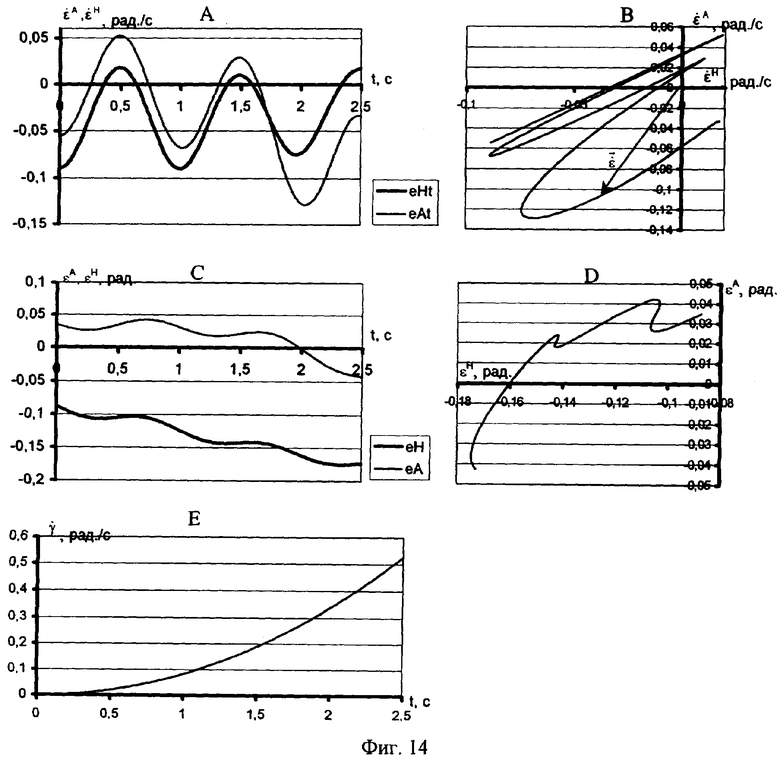
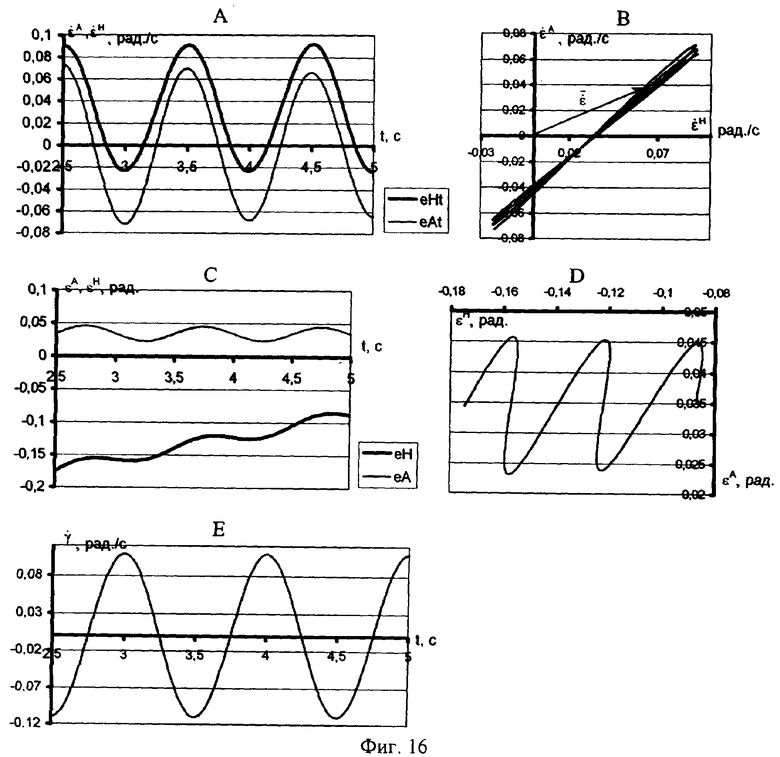
Результаты математического моделирования процесса торможения вращения по крену подвижного носителя в соответствии с предлагаемым способом и согласно описанию работы системы, осуществляющей способ, без учета дополнительного торможения вращения подвижного носителя с помощью его аэродинамических стабилизаторов приведены на соответствующих диаграммах А, В, С, D, Е фиг.11-16.
При математическом моделировании были приняты, например, следующие исходные условия для каждого варианта реализации модели:
ψ=0; ϑ=0; εГ=0; εВ=-5°;  ; k=0,4; τ=0,025 с; (фиг.11);
; k=0,4; τ=0,025 с; (фиг.11);
ψ=0; ϑ=0; εГ=0; εВ=-5°; 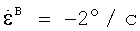 ; k=0,4; τ=0,025 с; (фиг.12);
; k=0,4; τ=0,025 с; (фиг.12);
ψ=ψmaxsin(2π·fψ·t); ϑ=ϑmaxsin(2π·fϑ·t), где ψmax=0,5°, ϑmax=0,5°, fψ=1 Гц, fϑ=1 Гц; εГ=2°; εВ=-5°;  ; k=0,4; τ=0,025 с; (фиг.13);
; k=0,4; τ=0,025 с; (фиг.13);
ψ=ψmaxsin(2π·fψ·t); ϑ=ϑmaxsin(2π·fϑ·t), где ψmax=0,5°, ϑmax=0,5°, fψ=1 Гц, fϑ=1 Гц; εГ=0; εВ=-5°;  ; k=0,4; τ=0,025 с;
; k=0,4; τ=0,025 с;  (фиг.14);
(фиг.14);
ψ=ψmaxsin(2π·fψ·t); ϑ=ϑmaxsin(2π·fϑ·t); γ=γmaxsin(2π·fγ·t), где ψmax=0,5°, ϑmax=0,5°, γmax=1,0°, fψ=1 Гц, fϑ=1 Гц, fγ=1 Гц; εГ=2°; εВ=-5°; (фиг.15);
ψ=ψmaxsin(2π·fψ·t); ϑ=ϑmaxsin(2π·fϑ·t); γ=γmaxsin(2π·fγ·t), где ψmax=0,5°, ϑmax=0,5°, γmax=1,0°, fψ=1 Гц, fϑ=1 Гц, fγ=1 Гц; εГ=2°; εВ=-10°; (фиг.16).
Таким образом, предлагаемые технические решения обеспечивают достижение положительного эффекта, заключающегося в следующем.
Обеспечивают стабилизацию направления зеркала антенного устройства на объект визирования при круговом вращении основания антенного устройства, установленного жестко внутри корпуса вращающегося по крену подвижного носителя с одновременным торможением вращения по крену подвижного носителя. Это достигается благодаря тому, что, как аналитически показано, предложенная кинематическая схема (фиг.10) антенного устройства (фиг.9) реализует свойство двухосного карданова подвеса при круговом вращении основания антенного устройства преобразовывать это вращение в два ортогональных короткопериодических колебания наружной и внутренней рамок двухосного карданова подвеса, сдвинутых по фазе на 90 градусов. При этом информация управляемого трехстепенного гироскопа, установленного во внутренней рамке двухосного карданова подвеса, а также узлы гиростабилизации 4 и 5 направления зеркала антенного устройства по углу наклона и по азимуту обеспечивают при круговом вращении основания антенного устройства удержание задаваемого направления зеркала на ОВ.
Кроме того, одновременно при наличии колебаний подвижного носителя по тангажу и по рысканию при круговом вращении основания антенного устройства вместе с вращением по крену подвижного носителя благодаря предложенным техническим решениям реализуется стабилизация направления зеркала антенного устройства на ОВ.
В предложенной системе, осуществляющей заявленный способ, по сигналам датчиков угла поворота рамок двухосного карданова подвеса антенного устройства системы по сигналу, пропорциональному периоду короткопериодических колебаний рамок двухосного карданова подвеса антенного устройства при круговом вращении его основания, в ЦВУ определяется сигнал, пропорциональный угловой скорости вращения по крену подвижного носителя.
При этом предложенная система одновременно формирует сигналы, пропорциональные текущим значениям угла наклона и азимута ОВ, а также сигналы, пропорциональные текущим значениям углов визирования ОВ в горизонтальной плоскости и в вертикальной плоскости.
Аппаратная реализация предлагаемой системы, осуществляющей заявленный способ, как показывают разработка системы и проведенные ее стендовые испытания, подтвердила достижение поставленной цели.
Кроме того, реализация предложенных технических решений в бортовом аппаратном комплексе системы управления подвижного носителя обеспечивает при круговом вращении основания антенного устройства вместе с вращающимся по крену подвижным носителем формирование сигналов автоматического сопровождения ОВ, а также инерциальное определение сигналов, пропорциональных параметрам вектора визирования точки прицеливания и/или ОВ, задаваемых начальными координатами и начальными условиями выставки инерциального измерителя при предстартовой подготовке подвижного носителя.
При модернизации многочисленных неуправляемых носителей, вращающихся по крену, находящихся в эксплуатации, предложенные технические решения исключают необходимость существенной и затратной конструкторской и промышленной доработки их корпуса и двигательной установки, обеспечивая преобразование неуправляемых подвижных носителей в управляемые с высокоточным самонаведением на ОВ.


Изобретение относится к устройствам с изменяющейся ориентацией диаграммы направленности волн, излучаемых антенной. Технический результат - формирование сигналов стабилизации. Для этого в цифровом вычислительном устройстве (ЦВУ) по сигналам радиолокационного сопровождения OB и/или по сигналам инерциального измерителя параметров вектора визирования точки прицеливания (ТП) формируют длиннопериодические сигналы, пропорциональные скорости изменения углов визирования, определяющих текущее направление зеркала антенного устройства на OB в горизонтальной и в вертикальной плоскостях. Сформированными длиннопериодическими сигналами воздействуют на соответствующие датчики момента управляемого трехстепенного гироскопа, являющегося чувствительным элементом следящего гиропривода зеркала антенного устройства. По сигналам скорости изменения углов визирования определяют текущее направление зеркала антенного устройства на OB в горизонтальной и в вертикальной плоскостях. 2 н.п. ф-лы, 16 ил.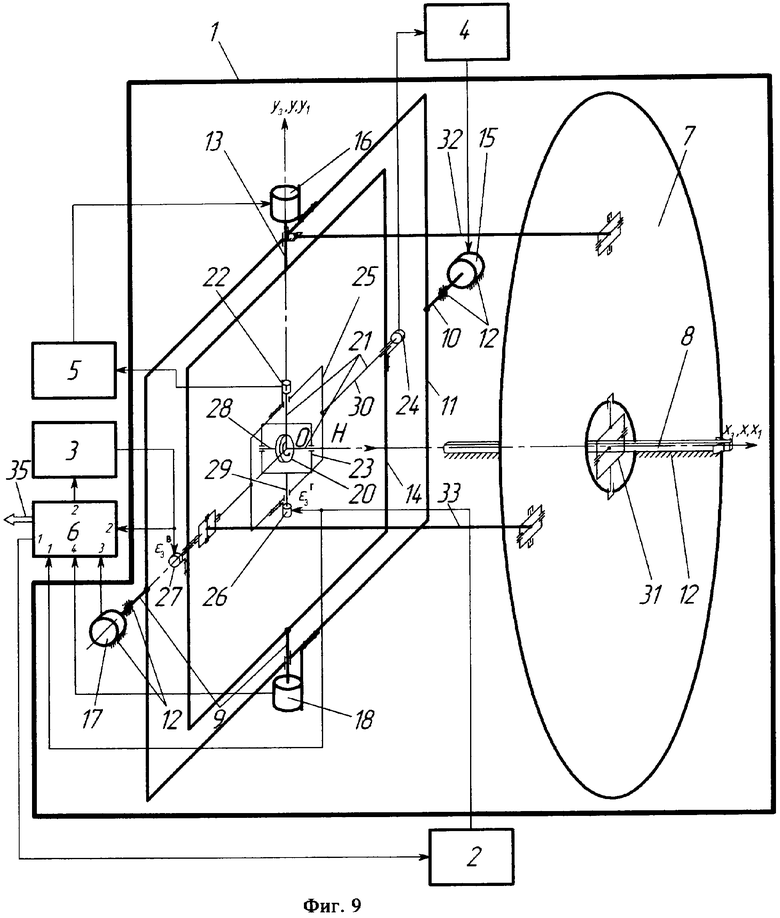
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1996 |
|
RU2104578C1 |
| ФЛЮС ДЛЯ КЕРАМИЧЕСКИХ НАДГЛАЗУРНЫХ КРАСОК | 2006 |
|
RU2311372C1 |
| US 5922039 A, 13.07.1999. | |||

